In the rapidly evolving landscape of drone technology and autonomous systems, we often find ourselves borrowing terminology from the worlds of mathematics, statistics, and even probability theory to describe the performance and reliability of high-tech innovations. When we encounter a phrase like “5 2 odds” within the context of Tech & Innovation—specifically concerning AI follow modes, autonomous flight, and remote sensing—we are looking at a specific way of quantifying probability, risk, and predictive accuracy.
In technical terms, odds represent the ratio of the probability that an event will happen to the probability that it will not happen. Translated into the realm of drone innovation, “5 to 2 odds” implies a specific confidence interval or a probability distribution used by machine learning algorithms to make split-second decisions. Understanding this concept is crucial for developers and enterprise users who rely on the autonomous “intelligence” of modern UAVs (Unmanned Aerial Vehicles).
The Role of Probability in Autonomous UAV Systems
At the heart of every high-end drone is a flight controller powered by complex algorithms that are constantly calculating the probability of various outcomes. Whether it is a drone navigating a dense forest or a mapping UAV determining the precision of its GPS coordinates, probability is the language of the machine.
Predictive Modeling and Pathfinding
When a drone is tasked with autonomous pathfinding, it doesn’t just “see” a path; it calculates the odds of a successful traversal. If an AI-driven obstacle avoidance system determines that a particular trajectory has 5 to 2 odds of being clear, it means that for every seven calculated simulations, five results are successful and two result in a collision or a required course correction.
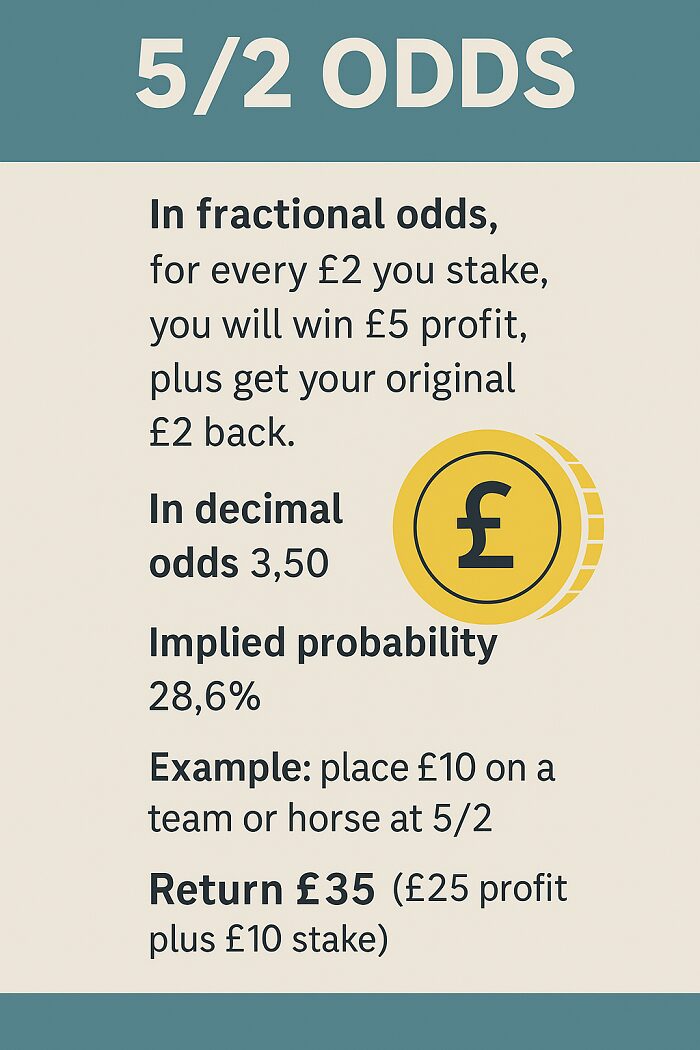
In the world of Tech & Innovation, moving from simple reactive sensors to predictive modeling is a massive leap. Modern drones use Simultaneous Localization and Mapping (SLAM) to build a 3D environment. Within this environment, the AI assigns “weights” to different paths. A 5:2 ratio in this context represents a specific threshold of confidence—roughly a 71.4% success probability. While this might be acceptable for high-speed racing drones testing the limits of their agility, industrial inspection drones often require much higher “odds” (such as 100:1) to ensure the safety of expensive infrastructure.
Bayesian Logic in Obstacle Avoidance
Bayesian inference is a statistical method in which Bayes’ theorem is used to update the probability for a hypothesis as more evidence or information becomes available. In drone innovation, this is used to filter out “noise” from sensors. If a drone’s ultrasonic sensor detects an object 2 meters away, but the visual sensors don’t see it, the AI must calculate the odds of which sensor is correct.
If the system calculates 5:2 odds in favor of the visual sensor, it is making a weighted decision based on historical data patterns. This type of probabilistic logic is what allows drones to fly in “messy” real-world environments—like under bridges or inside warehouses—where sensor data is often contradictory or degraded by interference.
Understanding Odds in Remote Sensing and Data Accuracy
Remote sensing is one of the most significant pillars of drone innovation. It involves the use of specialized sensors like LIDAR, multispectral cameras, and thermal imagers to gather data about the earth’s surface. In this niche, “odds” are frequently used to describe the reliability of data points and the likelihood of detecting specific anomalies.
Signal-to-Noise Ratios and Probability Thresholds
In remote sensing, the “signal” is the actual data you want to capture, while “noise” is the interference or irrelevant data. A 5:2 ratio can be a way of describing a specific signal-to-noise threshold in difficult environments. For example, if a drone is using thermal imaging to locate a leak in a subterranean pipeline, the AI must distinguish between the heat signature of the leak and the ambient heat of the surrounding soil.
If the AI reports a “positive hit” with 5 to 2 odds, it is informing the operator of a moderate level of certainty. In innovation-focused industries like precision agriculture, these odds are used to create “confidence maps.” A farmer looking at a drone-generated map of crop stress wants to know the odds that a specific area is actually under-watered rather than just suffering from a temporary shadow or sensor glitch.
Validating Geospatial Data
When drones are used for surveying and mapping, the precision of the output is measured through Root Mean Square Error (RMSE) and other statistical metrics. However, the initial processing of that data often involves “probabilistic data association.” This is the process of linking a point in one image to the same point in another image to create a 3D model.

Innovation in this field has led to algorithms that can handle “low odds” environments. For instance, over a featureless desert or a repetitive forest canopy, the odds of a traditional photogrammetry algorithm successfully matching points are low. New innovations in AI-based feature recognition have shifted these odds, allowing for high-accuracy mapping even when the visual evidence is sparse.
Risk Assessment in AI Follow Modes
AI Follow Mode (or “ActiveTrack”) is perhaps the most visible application of predictive probability in the consumer and prosumer drone markets. This technology allows a drone to lock onto a subject and follow it autonomously, even through complex terrain.
Dynamic Tracking and Movement Prediction
When a drone follows a mountain biker through a trail, it isn’t just reacting to the biker’s current position; it is predicting where the biker will be in the next 500 milliseconds. This is a classic “prediction vs. observation” problem. The AI calculates the odds of the biker turning left or right based on the visible path and the biker’s body lean.
In this context, 5 to 2 odds might describe the AI’s “branching” logic. If the path forks, and the biker hasn’t committed yet, the AI might calculate a 5:2 probability that the biker will take the wider, easier path. The innovation here lies in the drone’s ability to “hedge its bets” by positioning itself in a way that allows it to capture the shot regardless of which path the biker chooses. This “probabilistic positioning” is a hallmark of the latest generation of autonomous filming drones.
Quantifying Reliability in Complex Environments
The true test of an AI follow mode is its ability to handle “occlusions”—when the subject disappears behind a tree or a building. During an occlusion, the drone’s vision system has zero data. It must rely entirely on the “odds” of where the subject is likely to re-emerge.
Advanced drones use Kalman filters and particle filters to maintain a probability cloud of the subject’s location. If the subject was traveling at 15 mph and heading north, the odds are 5:2 that they will appear on the other side of a small grove of trees within 3 seconds. If they don’t appear, the AI recalculates the odds, perhaps deciding the subject has stopped or crashed, and triggers a “search” or “hover” command. This sophisticated management of uncertainty is what separates a toy drone from a professional-grade autonomous tool.
The Future of Statistical Intelligence in Drone Tech
As we look toward the future of drone innovation, the use of odds and probabilistic math will only become more integrated into the “brain” of the aircraft. We are moving away from rigid, “if-this-then-that” programming toward flexible, weighted decision-making systems.
Machine Learning and Weighted Decision Making
Machine learning models are trained on millions of images and flight hours. This training essentially “teaches” the drone what the odds are of various scenarios. For instance, a drone trained in an urban environment learns that the odds of a sudden gust of wind between two skyscrapers are high. It learns that the odds of a GPS signal dropping out under a bridge are nearly certain.
Innovation in “Edge AI”—processing power located on the drone itself rather than in the cloud—allows these odds to be calculated in real-time. This leads to what engineers call “Edge Intelligence,” where the drone can make high-stakes decisions (like an emergency landing in a crowded area) based on a complex calculation of the “odds of least harm.” If a motor fails, the drone calculates the odds of reaching an empty parking lot versus a grassy park, choosing the path with the highest probability of a safe outcome.
Autonomous Swarms and Collaborative Probabilities
The next frontier of drone innovation is swarm technology, where multiple drones work together to achieve a goal. In a swarm, the “odds” are distributed. If one drone in a search-and-rescue swarm detects a 5:2 probability of a human heat signature, it doesn’t just act alone. it communicates that probability to the rest of the swarm.
Other drones then shift their flight paths to converge on that area, effectively increasing the “odds” of a successful find through collaborative sensing. This “probabilistic consensus” is the foundation of modern multi-agent robotics. It ensures that the swarm as a whole is much smarter and more reliable than any single drone could be.
In conclusion, while “5 2 odds” might sound like a term for the racetrack, in the world of drone Tech & Innovation, it represents the vital transition from simple machines to intelligent, autonomous systems. It is the mathematical bridge between a sensor reading and a decisive action, allowing drones to navigate the uncertain, unpredictable, and complex reality of the world around us. By mastering the language of probability, drone technology continues to push the boundaries of what is possible in flight, sensing, and autonomous intelligence.