The Core of Aerial Navigation: Understanding the Inertial Measurement Unit
In the intricate world of flight technology, precision and stability are paramount. At the heart of achieving these critical attributes lies a sophisticated piece of hardware known as the Inertial Measurement Unit, or IMU. Far from a mere accessory, the IMU is the sensory backbone for virtually all modern flying platforms, from commercial airliners to hobbyist drones. It is a fundamental component responsible for detecting and measuring an aircraft’s orientation, angular velocity, and linear acceleration in three-dimensional space. Without an IMU, consistent, stable flight and autonomous navigation would be an impossible feat.
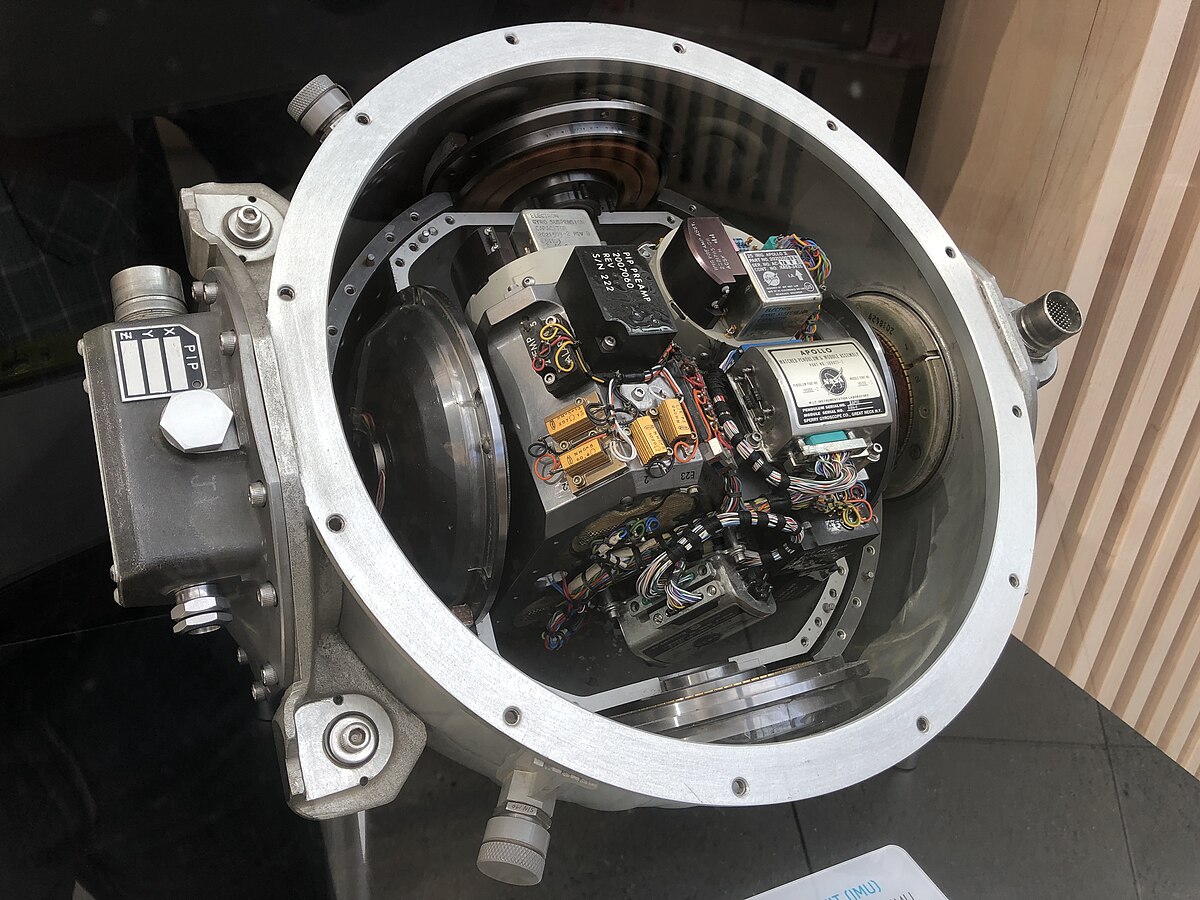
Originally developed for high-performance military and space applications, IMU technology has undergone significant miniaturization and cost reduction, making it accessible for a broad range of consumer and industrial applications. This evolution has democratized advanced flight capabilities, enabling the proliferation of sophisticated drones and enhancing the safety and reliability of traditional aviation. Essentially, the IMU provides the “sense of motion” that allows a flight controller to understand where the aircraft is heading, how fast it’s turning, and its exact attitude relative to the ground. This constant stream of precise data is the foundation upon which all subsequent navigation, stabilization, and control decisions are made.
Deconstructing the IMU: Accelerometers, Gyroscopes, and Magnetometers
An IMU is not a single sensor but rather an integrated system comprising several distinct types of sensors, each designed to capture a specific aspect of motion. The synergy between these components, often coupled with intelligent processing, transforms raw sensory input into actionable flight data. The three primary sensor types typically found within a modern IMU are accelerometers, gyroscopes, and magnetometers.
Accelerometers: Sensing Linear Motion
Accelerometers are transducers that measure non-gravitational acceleration along one or more axes. In an IMU, three accelerometers are typically arranged orthogonally to detect acceleration along the X, Y, and Z axes. The most common type used in contemporary IMUs are Micro-Electro-Mechanical Systems (MEMS) accelerometers. These tiny devices consist of a movable seismic mass suspended by springs, often etched onto a silicon wafer. When the IMU experiences acceleration, this mass displaces relative to its housing, and this displacement is measured as a change in capacitance or resistance, which is then converted into an electrical signal proportional to the acceleration.
In static conditions, accelerometers can detect the direction of gravity, providing crucial information about the device’s tilt (pitch and roll). When the IMU is moving, they measure the linear acceleration caused by the aircraft’s propulsion or external forces. While excellent at detecting instantaneous changes in velocity and static orientation, accelerometers are prone to cumulative drift when attempting to integrate acceleration over time to derive position, due to inherent noise and bias.
Gyroscopes: Capturing Angular Velocity
Gyroscopes, often referred to as “gyros,” are designed to measure angular velocity, or the rate of rotation around a particular axis. Like accelerometers, modern IMUs primarily utilize MEMS gyroscopes. These devices operate on the Coriolis effect: a small vibrating mass within the sensor experiences a deflecting force proportional to the angular velocity it encounters. This deflection is then measured to determine the rate of rotation. An IMU will typically contain three gyroscopes, oriented to measure rotation around the X (roll), Y (pitch), and Z (yaw) axes.
Gyroscopes are indispensable for flight stabilization, as they provide real-time data on how quickly an aircraft is rotating. This allows the flight controller to make immediate adjustments to maintain stability or execute precise maneuvers. For instance, if a drone begins to roll unexpectedly due to wind, the gyroscope detects this angular velocity, prompting the flight controller to adjust propeller speeds to counteract the roll. However, similar to accelerometers, gyroscopes are susceptible to drift over time, meaning their reported angular position can gradually diverge from the true orientation if not periodically corrected by other sensors or external references.
Magnetometers: The Digital Compass
Magnetometers, often integrated into the IMU package, act as the electronic equivalent of a compass. These sensors detect the strength and direction of magnetic fields, most notably the Earth’s geomagnetic field. By measuring the components of the local magnetic field along three orthogonal axes, a magnetometer can determine the aircraft’s heading relative to magnetic north. This provides an absolute reference for yaw orientation, which is crucial for navigation and maintaining a consistent flight path.
While highly effective for determining heading, magnetometers are susceptible to interference from local magnetic anomalies, such as metallic structures, power lines, or even the drone’s own electronics (motors, batteries). Proper calibration and careful sensor placement are essential to mitigate these effects. Despite these challenges, the magnetometer plays a vital role in complementing the accelerometer and gyroscope data, especially in correcting the heading drift that gyroscopes accumulate over prolonged flight.
The Power of Sensor Fusion: From Raw Data to Precise Orientation
The individual strengths and weaknesses of accelerometers, gyroscopes, and magnetometers highlight the necessity of combining their data. No single sensor can provide a complete and perfectly accurate picture of an aircraft’s motion and orientation independently. This is where “sensor fusion” comes and plays a critical role. Sensor fusion is the process of intelligently combining data from multiple sensors to achieve a more accurate, robust, and reliable estimate of the aircraft’s state (attitude, heading, and position) than could be derived from any single sensor alone.
Advanced algorithms, such as Kalman filters or complementary filters, are at the core of sensor fusion. These algorithms weigh the reliability of each sensor’s input based on its known characteristics (e.g., gyroscopes are good for short-term rotation, accelerometers for long-term tilt, magnetometers for absolute heading) and estimate the most probable true orientation. For example, while a gyroscope provides excellent high-frequency rotational data, it drifts over time. An accelerometer can correct the pitch and roll drift by referencing gravity, and a magnetometer can correct the yaw drift by referencing magnetic north. The sensor fusion algorithm continuously blends these inputs, effectively filtering out noise and compensating for the inherent inaccuracies of individual sensors to generate a highly stable and accurate Attitude and Heading Reference System (AHRS) output. This fused data stream is what the flight controller uses to maintain stability, execute commands, and navigate.
IMUs in Modern Flight Technology: Stabilization, Control, and Autonomous Operations
The outputs of the IMU, processed through sophisticated sensor fusion algorithms, are the lifeblood of modern flight technology. They empower systems with the intelligence needed for everything from basic stabilization to complex autonomous missions.
Flight Stabilization and Control
The most immediate and fundamental application of IMU data in flight technology is stabilization. For any flying platform, maintaining a desired attitude (pitch, roll, and yaw) is critical. The IMU continuously feeds real-time orientation and angular velocity data to the flight controller. If a gust of wind causes a drone to tilt or rotate unexpectedly, the gyroscopes and accelerometers within the IMU instantly detect this deviation. The flight controller then calculates the necessary corrective actions, such as adjusting the speed of individual motors, to bring the aircraft back to its desired orientation. This rapid feedback loop, operating hundreds or thousands of times per second, is what gives modern drones their remarkable stability and responsiveness, allowing for smooth flight even in challenging conditions.
Precision Navigation and Positioning
While GPS provides absolute positioning, it often suffers from latency, drift, and signal loss (e.g., in urban canyons or indoors). The IMU complements GPS data by providing high-frequency updates on relative position and velocity, even when GPS signals are weak or unavailable for short periods. This technique, known as “dead reckoning,” allows the flight controller to estimate the aircraft’s position by integrating acceleration and angular velocity data. When GPS signals are available, the IMU data can be fused with GPS data to produce an even more accurate and robust position estimate, reducing GPS noise and providing smooth, continuous position updates. This integration is vital for precise waypoint navigation, mapping missions, and maintaining accurate flight paths.
Enabling Autonomous Flight and Advanced Features
Beyond basic stability, IMU data is instrumental in enabling the advanced autonomous capabilities that characterize modern flight technology. For instance, for a drone to follow a programmed flight path, perform an automated landing, or execute a complex cinematic movement, it needs continuous, highly accurate information about its orientation and movement. The IMU provides this foundational data, allowing the flight controller to precisely execute commands. In conjunction with other sensors like vision systems or lidar, IMU data contributes to obstacle avoidance, allowing the aircraft to detect and react to its surroundings dynamically. Furthermore, intelligent flight modes such as “follow-me,” “return-to-home,” and “orbit” rely heavily on the IMU’s ability to precisely track the aircraft’s movements and maintain its intended orientation relative to a target or predefined trajectory.
Challenges and Future Trends in IMU Technology
Despite their sophistication, IMUs are not without their challenges, and the field continues to evolve rapidly.
Limitations and Considerations
One of the primary limitations of IMUs, particularly gyroscopes, is drift. Over time, minor errors in sensor readings accumulate, leading to a gradual divergence from the true orientation. While sensor fusion with magnetometers and GPS helps mitigate this, perfect cancellation is rarely achieved. Environmental factors such as temperature changes can affect sensor performance, requiring careful calibration. Vibrations from motors or airframes can introduce noise into accelerometer and gyroscope readings, necessitating vibration damping and sophisticated filtering. Magnetometers, as discussed, are susceptible to magnetic interference, which can lead to erroneous heading information.
Advancements and Future Prospects
The future of IMU technology is focused on enhancing precision, reducing size and power consumption, and improving robustness. Researchers are exploring new MEMS designs, advanced materials, and more sophisticated sensor fusion algorithms to create IMUs that are even smaller, lighter, more accurate, and less susceptible to environmental interference. Integration of IMUs with other micro-sensors and AI-driven processing promises to unlock new levels of contextual awareness and predictive capabilities for flying platforms. As urban air mobility (UAM) and fully autonomous systems become more prevalent, the demand for highly reliable, redundant, and precisely calibrated IMUs will only intensify, pushing the boundaries of what these tiny, yet incredibly powerful, devices can achieve in navigating the skies.