While the term “virtual functions” is intrinsically linked to object-oriented programming (OOP) paradigms, particularly C++, its underlying principles can offer valuable conceptual insights even within the context of embedded systems development, which often leverages C. Understanding how virtual functions facilitate dynamic behavior is crucial for designing flexible and extensible software architectures, especially in complex systems like advanced drone flight controllers or sophisticated camera stabilization algorithms. Although C itself does not possess direct support for virtual functions in the C++ sense, the patterns and strategies employed to achieve similar dynamic dispatch mechanisms in C can be highly illuminating for developers working in these technically demanding fields.
Simulating Dynamic Dispatch in C
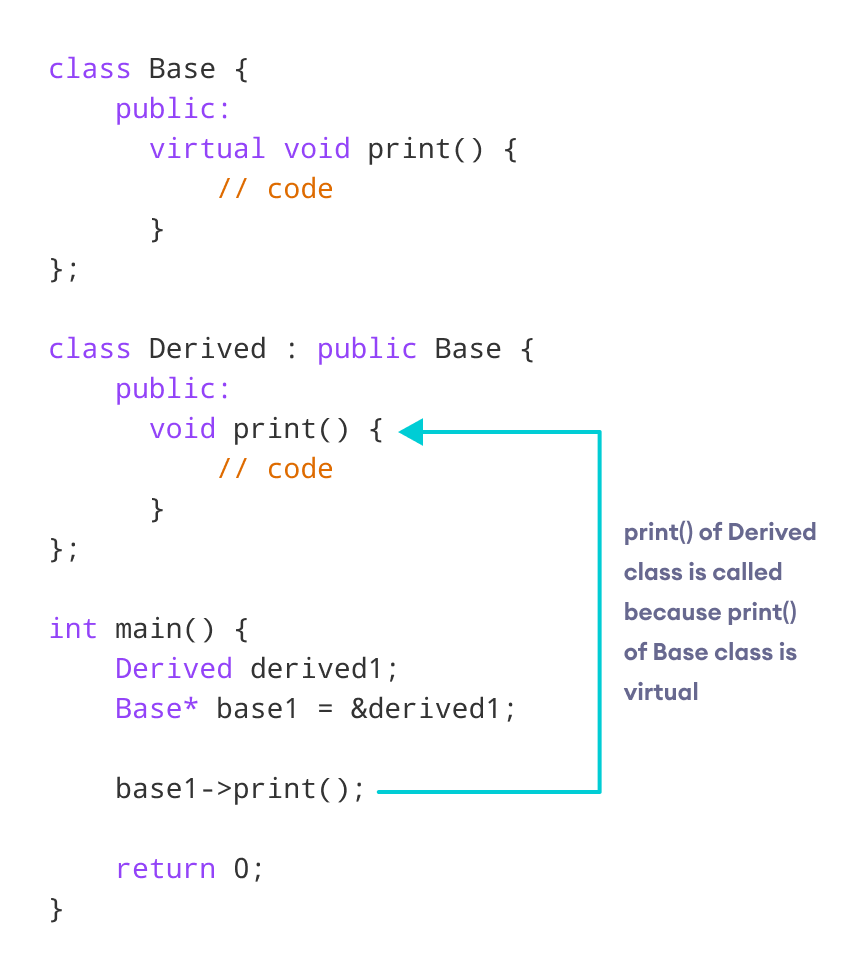
In C++, virtual functions are a cornerstone of polymorphism, enabling a program to call the correct method on an object at runtime, even when the object’s exact type is not known until execution. This is achieved through a virtual table (vtable), a hidden pointer within an object that points to a table of function pointers specific to the object’s class. When a virtual function is called, the program dereferences this vptr to find the correct function pointer in the vtable.
In C, this level of direct, built-in support is absent. However, the same objective – to achieve runtime polymorphism and allow different pieces of data to respond to the same function call in their own specific ways – can be emulated through careful design patterns. This emulation primarily revolves around using function pointers within structures.
Function Pointers as the Core Mechanism
The most common and effective way to simulate virtual functions in C is by embedding function pointers within structures. Think of a structure as representing an object or a “type” of component in your system. Instead of having methods directly associated with the structure (as in C++ classes), you can include members that are pointers to functions. These function pointers will point to the actual implementations of operations that are intended to be dynamic.
For instance, consider a system where different types of sensors might be attached to a drone’s flight controller. Each sensor might have a unique way of reporting its data or calibrating itself. In a C++ OOP design, you would likely have a base Sensor class with a virtual readData() method, and derived classes like IMUSensor and GPS would override this method. In C, you would achieve this by defining a common structure, say SensorInterface, that includes function pointers for common operations.
// Base structure representing a generic sensor interface
typedef struct {
// Function pointer for reading sensor data
void (*read_data)(void* sensor_instance, void* data_buffer);
// Function pointer for initializing the sensor
void (*initialize)(void* sensor_instance);
// Function pointer for cleaning up sensor resources
void (*cleanup)(void* sensor_instance);
// Other common sensor operations...
} SensorInterface;
// Example of a concrete sensor instance structure
typedef struct {
SensorInterface* interface; // Pointer to the set of functions
// Sensor-specific data members (e.g., calibration values, device handle)
int calibration_factor;
// ... other sensor-specific data
} IMUSensor;
typedef struct {
SensorInterface* interface; // Pointer to the set of functions
// Sensor-specific data members (e.g., GPS coordinates, satellite count)
double latitude;
double longitude;
// ... other sensor-specific data
} GPSSensor;
In this C approach, the SensorInterface acts as a blueprint for how different sensor types should be interacted with. Each concrete sensor structure (IMUSensor, GPSSensor) would contain a pointer to an instance of SensorInterface. This SensorInterface instance would then hold pointers to the specific implementations of read_data, initialize, and cleanup functions tailored for that particular sensor type.
Implementing Concrete Sensor Operations
To make this concrete, we would define the actual functions for each sensor type and then create SensorInterface instances that point to these functions.
// Implementations for IMUSensor
void imu_read_data(void* sensor_instance, void* data_buffer) {
IMUSensor* imu = (IMUSensor*)sensor_instance;
// Actual IMU data reading logic...
printf("Reading IMU data. Calibration: %dn", imu->calibration_factor);
// Populate data_buffer...
}
void imu_initialize(void* sensor_instance) {
IMUSensor* imu = (IMUSensor*)sensor_instance;
// IMU specific initialization...
printf("Initializing IMU sensor...n");
imu->calibration_factor = 10; // Example initialization
}
void imu_cleanup(void* sensor_instance) {
IMUSensor* imu = (IMUSensor*)sensor_instance;
// IMU specific cleanup...
printf("Cleaning up IMU sensor...n");
}
// Implementations for GPSSensor
void gps_read_data(void* sensor_instance, void* data_buffer) {
GPSSensor* gps = (GPSSensor*)sensor_instance;
// Actual GPS data reading logic...
printf("Reading GPS data. Lat: %.6f, Lon: %.6fn", gps->latitude, gps->longitude);
// Populate data_buffer...
}
void gps_initialize(void* sensor_instance) {
GPSSensor* gps = (GPSSensor*)sensor_instance;
// GPS specific initialization...
printf("Initializing GPS sensor...n");
gps->latitude = 0.0;
gps->longitude = 0.0; // Example initialization
}
void gps_cleanup(void* sensor_instance) {
GPSSensor* gps = (GPSSensor*)sensor_instance;
// GPS specific cleanup...
printf("Cleaning up GPS sensor...n");
}
// Define the interface instances
SensorInterface imu_interface = {
.read_data = imu_read_data,
.initialize = imu_initialize,
.cleanup = imu_cleanup
};
SensorInterface gps_interface = {
.read_data = gps_read_data,
.initialize = gps_initialize,
.cleanup = gps_cleanup
};
In this setup, imu_interface and gps_interface are static instances of SensorInterface that hold pointers to the respective sensor-specific functions.
Runtime Polymorphism in Action
The power of this approach becomes evident when you have a generic handler or manager that operates on an array or list of sensors without knowing their specific types.
// A collection of sensor instances (can be mixed types)
void* sensors[2]; // Array to hold pointers to sensor instances
int sensor_count = 0;
// Function to add a sensor, ensuring its interface is set
void add_sensor(void* sensor_instance, SensorInterface* interface) {
// Assuming each sensor instance structure has a 'interface' member at the beginning
// This is a common pattern for type-erasure.
// In a more robust system, you might pass the interface pointer separately.
// For simplicity here, we assume the first member of the instance is the interface pointer.
((SensorInterface**)(sensor_instance))[0] = interface;
if (sensor_count < sizeof(sensors)/sizeof(sensors[0])) {
sensors[sensor_count++] = sensor_instance;
} else {
printf("Sensor array full!n");
}
}
// Generic function to process all sensors
void process_all_sensors() {
for (int i = 0; i < sensor_count; ++i) {
// Cast to the base interface pointer.
// The actual type of the sensor is implicitly handled via the function pointers.
SensorInterface* sensor_iface = ((SensorInterface**)sensors[i])[0];
// Call the 'initialize' function via the interface
sensor_iface->initialize(sensors[i]);
// Example: Read data
char buffer[100]; // Placeholder for data
sensor_iface->read_data(sensors[i], buffer);
// Call the 'cleanup' function via the interface
sensor_iface->cleanup(sensors[i]);
}
}
<p style="text-align:center;"><img class="center-image" src="https://trainings.internshala.com/blog/wp-content/uploads/2023/05/Virtual-Function-in-C.jpg" alt=""></p>
int main() {
// Instantiate concrete sensors
IMUSensor my_imu;
GPSSensor my_gps;
// Add sensors with their respective interfaces
add_sensor(&my_imu, &imu_interface);
add_sensor(&my_gps, &gps_interface);
// Process all sensors generically
process_all_sensors();
return 0;
}
This main function demonstrates the power of the pattern. process_all_sensors iterates through an array of void* pointers, treating each as a generic sensor. By dereferencing the SensorInterface pointer embedded within each actual sensor instance, it can call initialize, read_data, and cleanup without ever needing to know if it’s dealing with an IMU or a GPS. The correct, sensor-specific implementation is invoked at runtime.
Advantages in Drone and Flight Systems
The ability to simulate dynamic dispatch in C offers significant advantages when developing complex systems like drone flight controllers or sophisticated camera stabilization algorithms. These systems often involve managing a diverse array of hardware components and software modules that need to behave differently based on their specific type or configuration.
Modularity and Extensibility
By employing function pointer-based interfaces, you can design systems that are highly modular and extensible. New sensor types, communication protocols, or control algorithms can be added without modifying the core logic of the system’s manager or handler modules. For example, if you develop a new type of obstacle avoidance sensor, you simply need to create its specific implementation functions and a corresponding SensorInterface instance. The existing obstacle avoidance management module, which iterates through sensor interfaces, will automatically be able to utilize the new sensor’s capabilities. This adherence to the Open/Closed Principle (open for extension, closed for modification) is invaluable in rapidly evolving fields.
Abstraction and Reduced Coupling
This pattern provides a strong level of abstraction. The higher-level modules interact with components through their defined interfaces, shielding them from the intricate details of specific implementations. This reduces coupling between different parts of the system, making it easier to understand, test, and maintain. In a flight control system, the main flight stabilization algorithm might only interact with a generic “attitude sensor” interface, rather than directly with specific IMU or magnetometer implementations. This separation of concerns simplifies the core logic and allows for easier swapping of sensor hardware or algorithms.
Resource Management
In embedded systems, efficient resource management is paramount. The function pointer approach allows for well-defined initialization and cleanup procedures for each component type. When a new component is brought online or taken offline, its specific initialization and cleanup routines can be called through the interface, ensuring that all necessary hardware resources are correctly allocated and deallocated. For example, a drone’s power management system could use this pattern to initialize and de-initialize various subsystems like motors, communication modules, and sensors in a controlled and ordered manner.
Code Reusability
The generic interfaces and handler functions can be reused across different projects or different parts of the same project. A well-designed sensor interface, for instance, could be adapted for use in various drone models or even other robotic platforms. This promotes code reusability and reduces development time.
Considerations and Best Practices
While emulating virtual functions in C offers significant benefits, it’s important to be aware of the potential pitfalls and adhere to best practices to ensure robust and maintainable code.
Type Safety and Casting
One of the primary challenges in C is the lack of compile-time type safety that is inherent in C++. When working with void* pointers and function pointers, it’s the developer’s responsibility to ensure correct casting. Incorrect casting can lead to undefined behavior, crashes, and subtle bugs that are difficult to diagnose.
Best Practice: Use typedef to define clear pointer types for your structures and interfaces. Be meticulous with casting, and consider using compile-time assertions (_Static_assert in C11 and later) or runtime checks where appropriate to validate types or ensure that the correct interface is being used for a given instance. Documenting which structure is expected to be passed to which interface function is crucial.
Interface Definition and Consistency
The definition of the SensorInterface (or any other interface structure) is critical. It must encompass all the necessary operations that the abstract type needs to support. Changes to the interface will necessitate changes in all implementing structures and their function pointer assignments.
Best Practice: Design your interfaces carefully, anticipating future needs. Consider versioning interfaces if backward compatibility is a concern. Ensure that all functions within an interface have consistent naming conventions and adhere to a uniform function signature (e.g., parameter order, return types).
State Management
The void* sensor_instance parameter in the function pointers is essential for carrying the state of the specific object. Without it, each function pointer would refer to a global function that has no context of the particular instance it’s operating on.
Best Practice: Clearly document how the void* pointer should be interpreted by the function. Typically, it will be cast back to the concrete structure type (e.g., IMUSensor*) within the function implementation. Ensure that the first member of your concrete structures is often a pointer to its interface structure, simplifying retrieval of the interface.
Memory Management
In C, memory management is manual. When creating instances of structures that utilize function pointer interfaces, you are responsible for allocating and freeing the associated memory.
Best Practice: If using dynamic memory allocation (e.g., malloc, calloc), always pair it with corresponding free calls to prevent memory leaks. The cleanup function within the interface is an ideal place to handle the deallocation of instance-specific resources, including the instance itself if it was dynamically allocated.

Alternatives and Libraries
While the function pointer approach is a common and effective way to emulate virtual functions in C, other patterns and libraries can achieve similar results. For instance, some embedded frameworks might provide their own object-oriented-like abstractions or component management systems. However, the fundamental principle of using indirection (like function pointers) to achieve dynamic behavior remains the core concept.
In conclusion, while C may not have “virtual functions” built-in like C++, the principles of achieving dynamic dispatch, polymorphism, and extensibility are achievable through well-structured design patterns, primarily leveraging function pointers within structures. This technique is vital for building modular, maintainable, and scalable software for demanding applications such as drone flight systems and advanced camera imaging technologies, allowing for flexibility and adaptability in the face of evolving requirements and diverse hardware.