The digital world, the very foundation upon which modern flight technology is built, operates on a fundamental unit of information known as the “bit.” While the term “bit” might sound simple, its implications for flight technology are profound, underpinning everything from the precision of a drone’s navigation to the sophistication of its obstacle avoidance systems. Understanding bits is not just about grasping a computer science concept; it’s about appreciating the intricate language that allows our advanced aerial machines to perceive, process, and act upon their environment.
The Binary Foundation of Flight Data
At its core, a bit is the smallest unit of data in computing. It’s a binary digit, meaning it can represent one of two distinct states: a 0 or a 1. Think of it as an on or off switch. This seemingly rudimentary concept is the bedrock upon which all digital information is constructed. For flight technology, where split-second decisions and complex calculations are paramount, the ability to represent vast amounts of data using these simple binary states is revolutionary.
From Bits to Bytes and Beyond
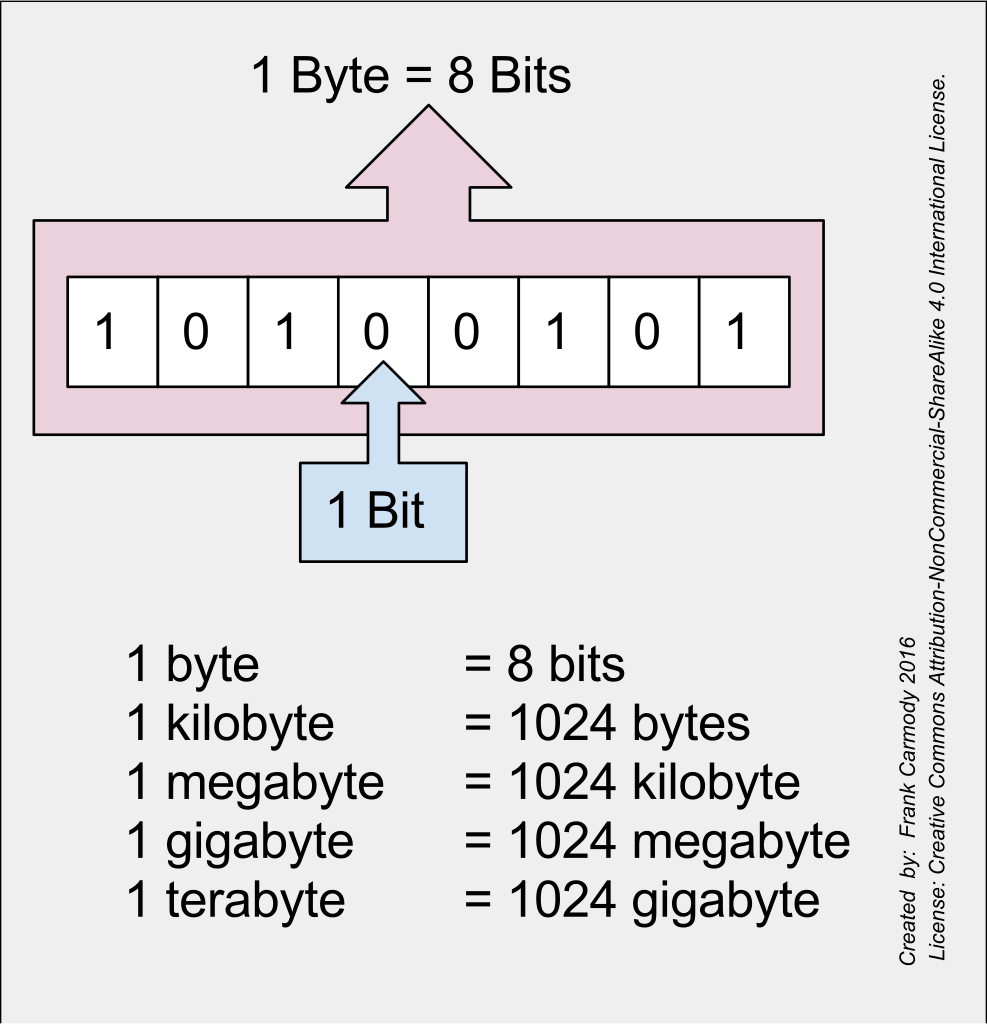
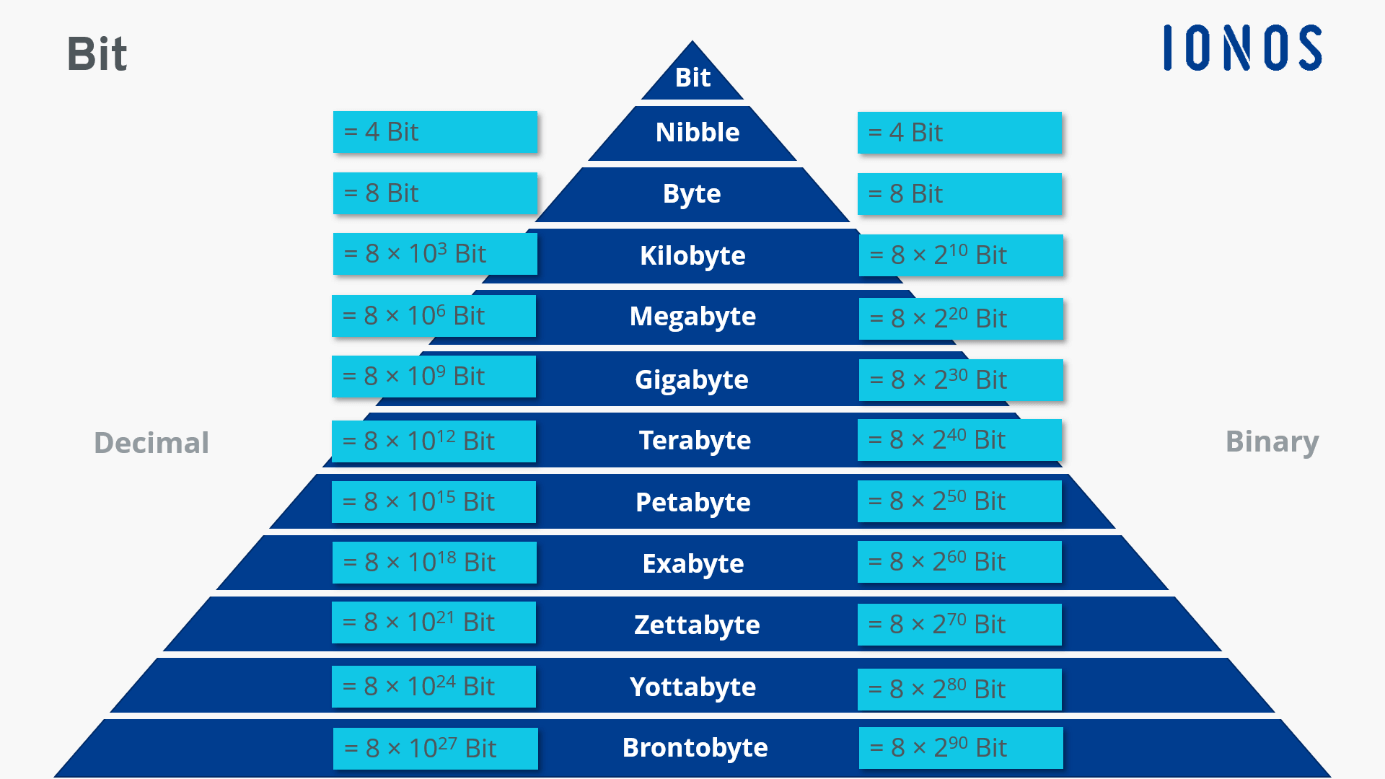
While a single bit holds minimal information, grouping them together allows for the representation of much more complex data. A byte, for instance, is typically composed of eight bits. This collection of eight 0s and 1s can represent 256 different values (2 to the power of 8). As we scale up, these bytes are combined into kilobytes, megabytes, gigabytes, and even terabytes, enabling the storage and processing of the immense datasets required by sophisticated flight systems.
Consider the data generated by a drone’s sensors:
- GPS Coordinates: Latitude, longitude, and altitude are all numerical values that, when translated into binary, require a specific number of bits to maintain the required precision. Higher precision GPS units will use more bits to represent these coordinates, leading to more accurate positioning.
- Sensor Readings: Inertial Measurement Units (IMUs) – comprising accelerometers and gyroscopes – provide data on the drone’s orientation and motion. Each of these readings, which are analog signals, must be converted into digital data through analog-to-digital converters (ADCs). These ADCs sample the analog signal at a specific rate and then quantize the value into a binary representation, with more bits leading to a finer resolution of the measured movement.
- Barometric Pressure: Used for altitude estimation, barometric pressure readings are also digital values requiring binary representation.
- Magnetometer Data: Providing heading information, the output of a magnetometer is similarly digitized.
The number of bits used to represent these values directly impacts the precision and accuracy of the flight system. A system that uses more bits for its altitude readings, for example, can detect and react to subtle changes in elevation, crucial for maintaining stable flight and avoiding ground proximity issues.
The Language of Algorithms
Beyond raw data storage, bits are the fundamental building blocks of the algorithms that govern a drone’s behavior. These algorithms, the sets of instructions that tell the flight controller what to do, are themselves encoded as binary sequences. Complex algorithms for flight stabilization, navigation, path planning, and obstacle avoidance are all intricate chains of logical operations performed on bits.
- Flight Stabilization: When a drone encounters turbulence, its IMUs detect the subtle shifts. This data is processed by stabilization algorithms, which rapidly adjust the motor speeds to counteract the unwanted movement. This entire process, from sensor input to motor command, is a continuous stream of bit manipulation. The faster and more efficiently these bits can be processed, the more responsive and stable the drone will be.
- Navigation: When a drone navigates from point A to point B, it’s executing a series of algorithms that interpret GPS data, compass headings, and waypoint information. These algorithms are essentially performing mathematical operations on binary representations of positions and desired paths. The precision of the binary representation directly influences the accuracy of the calculated flight path.
Bits in Action: Navigation and Stabilization Systems
The precision and speed with which flight technology can process bits are directly linked to the performance of its core systems, particularly navigation and stabilization.
Navigating the Skies with Binary Precision
Global Navigation Satellite Systems (GNSS), such as GPS, GLONASS, Galileo, and BeiDou, are fundamental to modern drone navigation. These systems transmit signals that are received by the drone’s GNSS receiver. The receiver uses these signals to calculate the drone’s precise position on Earth.
The accuracy of this positioning is heavily reliant on the resolution of the data. The raw positional data received from the satellites, along with the drone’s own calculated position, are all represented using binary numbers. The number of bits allocated to store these coordinates determines the level of detail. For instance, a higher precision GNSS receiver might use 64-bit floating-point numbers to represent latitude and longitude, allowing for centimeter-level accuracy, whereas a less sophisticated system might use 32-bit integers, resulting in meter-level accuracy.
This binary data is then fed into the flight controller’s navigation algorithms. These algorithms perform calculations to determine the drone’s current velocity, its intended trajectory, and any necessary course corrections. The efficiency of these calculations, performed on binary data, directly impacts how quickly a drone can react to changes in its environment or execute complex flight maneuvers. A drone programmed with sophisticated path planning algorithms, for example, relies on the ability to rapidly process numerous waypoints represented in binary to plot an optimal and safe route.
Stabilizing Flight with Bit-Level Control
A drone’s ability to remain stable in the air, especially in challenging conditions, is a testament to the power of digital signal processing and the bits that underpin it. The IMU is critical here, continuously measuring the drone’s acceleration and angular velocity. These analog signals are converted into digital data through ADCs. The resolution of these ADCs, measured in bits (e.g., 12-bit, 16-bit, or even 24-bit), dictates how finely the analog signal can be quantized.
A higher bit resolution means that the digital representation can capture more subtle variations in the analog signal, providing a more accurate picture of the drone’s motion. This highly detailed digital data is then fed into a Proportional-Integral-Derivative (PID) controller, a common algorithm used in flight stabilization. The PID controller uses this data to calculate the necessary adjustments to motor speeds, keeping the drone level and on its intended course.
The core of the PID controller involves mathematical operations on the digital sensor data. These operations, when translated into machine code, are sequences of bit manipulations. The speed at which the flight controller can perform these calculations – effectively manipulating bits at extremely high frequencies – determines how effectively it can react to external disturbances like wind gusts. A faster processing of bits allows for quicker adjustments to motor outputs, resulting in a more stable and responsive flight experience.
The Role of Bits in Advanced Flight Technology
As flight technology evolves, the demand for more sophisticated data processing and algorithmic complexity grows. This evolution is inextricably linked to advancements in how we handle and process bits.
Obstacle Avoidance: Perceiving the Unseen
Modern drones are increasingly equipped with advanced obstacle avoidance systems. These systems rely on a variety of sensors, such as ultrasonic sensors, infrared sensors, LiDAR, and vision-based systems. The data from these sensors, which are inherently analog or generate large volumes of raw information, must be converted into digital formats for processing.
- Ultrasonic and Infrared Sensors: These sensors measure distance by emitting sound or light waves and timing their return. The time-of-flight data, when converted to distance, is represented digitally. The resolution of this conversion, influenced by the number of bits used, determines the accuracy with which the drone can perceive nearby objects.
- LiDAR: Light Detection and Ranging (LiDAR) systems create detailed 3D maps of the environment by emitting laser pulses and measuring the time it takes for them to return. This generates millions of data points, each with its own positional information. These datasets are massive and require significant processing power, all built upon the foundation of binary bits. The ability to process these complex point clouds rapidly allows the drone to identify and navigate around obstacles in real-time.
- Vision-Based Systems: Drones equipped with cameras use computer vision algorithms to detect obstacles. These algorithms analyze images, identifying edges, shapes, and textures to recognize objects. The images themselves are composed of pixels, each with a color value represented digitally. The processing of these pixels, comparing them against trained models, and making decisions about avoidance maneuvers are all computationally intensive tasks that rely on the manipulation of vast numbers of bits. The depth of color information (e.g., 8-bit, 10-bit, 12-bit color depth) also directly relates to the number of bits used to represent each color component, impacting the visual fidelity and the accuracy of object recognition.
Autonomous Flight and AI: The Future is Binary
The ultimate goal for many in flight technology is fully autonomous flight. This involves drones capable of independent decision-making, pathfinding, and mission execution without human intervention. This ambition is deeply intertwined with advancements in Artificial Intelligence (AI) and machine learning, both of which are fundamentally built on the processing of vast quantities of data represented by bits.
AI algorithms used for autonomous flight learn from data. This data can include flight logs, environmental maps, and simulated scenarios. These learning processes involve adjusting billions of parameters within neural networks, each of which is a numerical value represented by bits. The more complex the AI model and the more data it is trained on, the more bits are required for its representation and the more computational power is needed to train and run it.
Consider AI-powered “follow me” modes. The drone uses its sensors and cameras to identify and track a target. This involves sophisticated object recognition algorithms, often powered by deep learning neural networks. The data from the cameras (images) and other sensors is processed, and the AI makes decisions about how to adjust the drone’s position and velocity to maintain the target in view. This entire chain of events is a high-speed ballet of bit manipulation within the drone’s onboard computer.
The progression towards higher bit depths in sensors, more efficient data compression techniques (which are also bit-based), and faster processing units directly enables more sophisticated and reliable autonomous flight systems. The future of flight technology is not just about smarter algorithms; it’s about the ever-increasing ability to harness the power of bits to imbue these machines with intelligence and autonomy.