The integration of powerful artificial intelligence and computer vision capabilities into unmanned aerial vehicles (UAVs) has opened up a new frontier in drone technology. At the heart of many sophisticated AI algorithms lies PyTorch, an open-source machine learning framework that provides flexibility and speed for building and training neural networks. This article will guide you through the process of installing PyTorch, specifically tailored for applications within the realm of advanced drone AI and computer vision, enabling features like object detection, autonomous navigation, and semantic segmentation.
Understanding Your Installation Needs
Before diving into the installation process, it’s crucial to understand the key factors that will influence your setup. The requirements for PyTorch installation depend heavily on your intended use case and the hardware you’ll be utilizing.

Hardware Considerations: CPU vs. GPU
The most significant factor affecting PyTorch performance is whether you will be leveraging a Graphics Processing Unit (GPU) for accelerated computations.
- CPU Installation: This is the most basic and universally compatible installation. It’s suitable for development, experimentation with smaller models, and scenarios where real-time performance isn’t paramount. If you’re just starting with PyTorch or building initial prototypes for drone AI applications on your development machine, a CPU-only installation is a good entry point.
- GPU Installation: For demanding tasks like real-time object detection on high-resolution aerial imagery, complex autonomous flight path planning, or training large deep learning models, a GPU is essential. NVIDIA GPUs, with their CUDA (Compute Unified Device Architecture) support, are the de facto standard for PyTorch acceleration. Ensure your GPU is CUDA-enabled and has sufficient VRAM for your models.
Operating System Compatibility
PyTorch officially supports the following operating systems:
- Linux: Widely used in research and production for AI, offering excellent performance and compatibility.
- Windows: A popular choice for developers, with robust support for PyTorch.
- macOS: Supported, though GPU acceleration might be more limited depending on the hardware.
Python Environment Management
Maintaining a clean and isolated Python environment is critical to avoid dependency conflicts between different projects. We highly recommend using either conda or venv for managing your Python packages.
- Conda: A powerful package and environment manager that can handle Python packages as well as non-Python dependencies. It’s particularly useful for managing CUDA and cuDNN versions when installing GPU-accelerated PyTorch.
- venv: Python’s built-in module for creating lightweight virtual environments. It’s simpler to set up for basic Python package management.
Installing PyTorch with Conda
Conda is often the preferred method for installing PyTorch, especially for GPU acceleration, as it simplifies the management of CUDA and cuDNN dependencies.
Creating a Conda Environment
First, ensure you have Miniconda or Anaconda installed. Then, create a new environment for your drone AI projects:
conda create -n drone_ai python=3.9 # Or your preferred Python version
conda activate drone_ai
Replace drone_ai with a descriptive name for your environment.
Installing PyTorch for CPU
Once your conda environment is activated, you can install the CPU-only version of PyTorch. Visit the official PyTorch website (pytorch.org) and use their “Get Started” section to select the correct command for your OS and PyTorch version. For a recent stable release, it will typically look like this:
conda install pytorch torchvision torchaudio cpuonly -c pytorch
pytorch: The core PyTorch library.torchvision: A companion library that provides popular datasets, model architectures, and image transformations for computer vision. This is indispensable for drone vision tasks.torchaudio: For audio processing, which might be relevant for drones equipped with microphones for environmental monitoring or sound-based navigation.cpuonly: Explicitly tells conda to install the CPU version.-c pytorch: Specifies the pytorch channel for package retrieval.
Installing PyTorch for GPU (NVIDIA CUDA)
Installing the GPU version requires careful attention to CUDA and cuDNN compatibility. The PyTorch website’s “Get Started” tool is the best resource to generate the correct command for your specific CUDA version.
Prerequisites for GPU Installation:
- NVIDIA Driver: Ensure you have the latest compatible NVIDIA driver installed on your system. You can download it from the official NVIDIA website.
- CUDA Toolkit: Install the CUDA Toolkit that is compatible with the PyTorch version you intend to install. The PyTorch website will specify the required CUDA version.
- cuDNN (CUDA Deep Neural Network library): cuDNN is a GPU-accelerated library of primitives for deep neural networks. It’s often bundled with the CUDA Toolkit or available as a separate download from NVIDIA.
Conda Installation Command (Example – check PyTorch website for exact command):
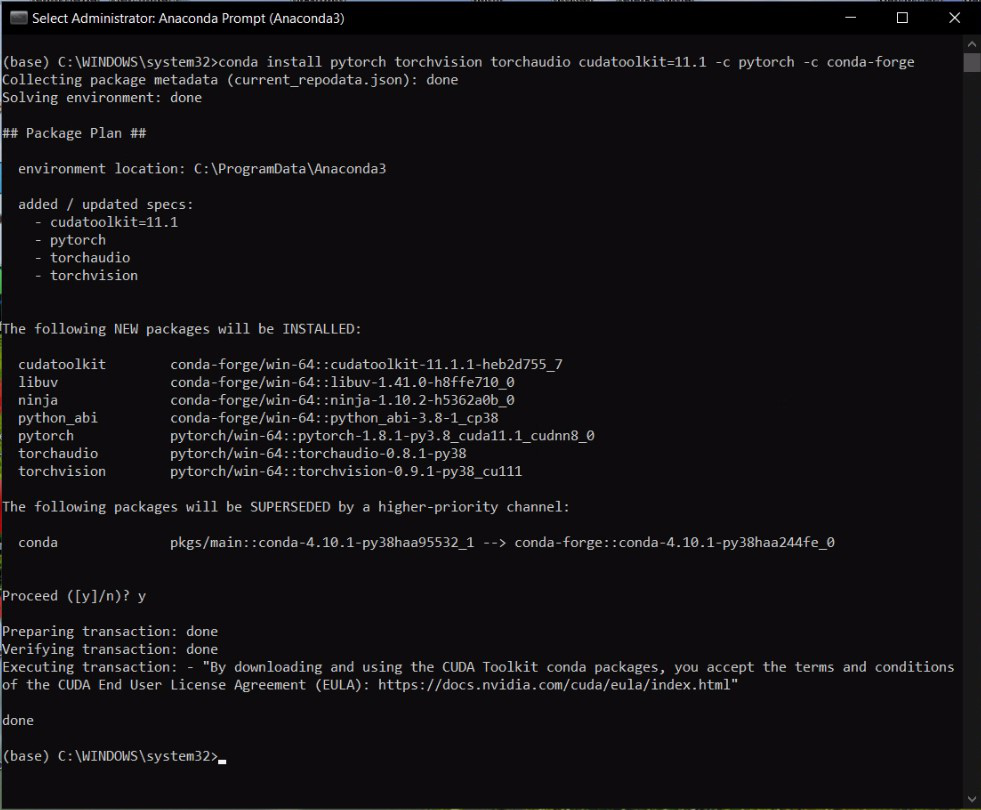
After activating your conda environment and ensuring prerequisites are met, use the command generated by the PyTorch website. It will look something like this, with specific CUDA version numbers:
conda install pytorch torchvision torchaudio cudatoolkit=11.3 -c pytorch
cudatoolkit=11.3: This tells conda to install the CUDA Toolkit version 11.3. You must match this to your system’s installed CUDA Toolkit and the version supported by the PyTorch build.
Verifying Your Installation
After the installation completes, you can verify it by running Python and importing PyTorch.
For CPU:
import torch
print(torch.__version__)
print(torch.cuda.is_available())
This should print your PyTorch version and False for torch.cuda.is_available().
For GPU:
import torch
print(torch.__version__)
print(torch.cuda.is_available())
This should print your PyTorch version and True for torch.cuda.is_available(), indicating that PyTorch can detect and utilize your NVIDIA GPU.
Installing PyTorch with Venv
Using venv is a simpler alternative if you don’t need the complex dependency management offered by conda, or if you’re primarily working on a system where CUDA installation is already managed separately.
Creating a Venv Environment
python -m venv drone_ai_venv
source drone_ai_venv/bin/activate # On Linux/macOS
# On Windows: .drone_ai_venvScriptsactivate
Installing PyTorch for CPU
With your venv activated, you can use pip to install the CPU version. Again, consult the PyTorch website for the most up-to-date command.
pip install torch torchvision torchaudio --extra-index-url https://download.pytorch.org/whl/cpu
--extra-index-url https://download.pytorch.org/whl/cpu: This flag directs pip to look for CPU-specific wheels on the official PyTorch download server.
Installing PyTorch for GPU (NVIDIA CUDA)
For GPU installations with venv, you’ll generally need to have your CUDA Toolkit and cuDNN installed system-wide. Pip will then find the appropriate CUDA-enabled PyTorch wheels.
Prerequisites: Ensure NVIDIA drivers, CUDA Toolkit, and cuDNN are installed and configured correctly on your system.
Pip Installation Command (Example – check PyTorch website for exact command):
pip install torch torchvision torchaudio --index-url https://download.pytorch.org/whl/cu113
--index-url https://download.pytorch.org/whl/cu113: This specifies the index URL for CUDA 11.3 compatible wheels. Crucially, you must replacecu113with the correct CUDA version identifier (e.g.,cu116,cu117,cu118,cu121) that matches your installed CUDA Toolkit version and the PyTorch build. The PyTorch website’s “Get Started” tool is essential for generating this correct command.
Verifying Your Installation (Venv)
The verification steps are identical to those for conda environments. Run Python within your activated venv:
import torch
print(torch.__version__)
print(torch.cuda.is_available())
Advanced PyTorch Configurations for Drone Applications
Once PyTorch is installed, you can begin leveraging its capabilities for your drone AI projects.
Optimizing for Real-time Performance
For tasks like real-time object tracking or evasive maneuvers, performance is paramount.
- Model Optimization: Explore techniques like model quantization, pruning, and knowledge distillation to create smaller, faster models suitable for deployment on resource-constrained drone hardware. PyTorch’s
torch.jit(TorchScript) can be used to serialize and optimize models for inference. - Hardware Acceleration: If deploying on the drone itself, ensure your drone’s onboard computer (e.g., NVIDIA Jetson) is configured to utilize its GPU for PyTorch inference.
- Efficient Data Loading: Utilize PyTorch’s
DataLoaderwith multiple workers to ensure that your data pipeline doesn’t become a bottleneck during training or inference.
Integrating with Drone SDKs and Hardware
To bring your PyTorch models to life on a drone, you’ll need to integrate them with drone-specific Software Development Kits (SDKs) and hardware interfaces.
- DJI SDKs: For DJI drones, libraries like the DJI Onboard SDK or Mobile SDK can be used to receive telemetry data, control the drone, and stream camera feeds. You can then process these feeds using your PyTorch models.
- PX4/ArduPilot Integration: For open-source flight controllers, integrating PyTorch models often involves running inference on companion computers (like Raspberry Pi or NVIDIA Jetson) connected to the flight controller via MAVLink.
- Camera Streams: Efficiently accessing and processing camera streams is vital. Libraries like OpenCV (
cv2) are commonly used in conjunction with PyTorch for image manipulation and pre-processing.
Common Drone AI/CV Use Cases with PyTorch
- Object Detection and Tracking: Identifying and following specific objects (e.g., people, vehicles, landing pads) in the aerial view. Models like YOLO, Faster R-CNN, and SSD, readily available in PyTorch, are excellent for this.
- Semantic and Instance Segmentation: Understanding the scene by classifying each pixel (e.g., sky, ground, buildings, vegetation). This is crucial for autonomous navigation and environmental mapping.
- Autonomous Navigation and Obstacle Avoidance: Using sensor data and computer vision to enable drones to fly autonomously, detect and avoid obstacles in real-time.
- Precision Agriculture: Analyzing aerial imagery to monitor crop health, detect diseases, and optimize resource application.
- Infrastructure Inspection: Automating the inspection of bridges, power lines, and wind turbines by detecting defects from high-resolution imagery.
By following these installation guidelines and understanding the fundamental concepts, you are well-equipped to harness the power of PyTorch for developing cutting-edge AI and computer vision solutions for your drone applications.