In the rapidly evolving landscape of unmanned aerial vehicles (UAVs) and sophisticated flight control systems, the terminology often shifts from the macroscopic—such as airframe design—to the microscopic world of signal processing. One such term that frequently surfaces in the context of sensor data management and signal integrity is the BBD, or Bucket Brigade Device. While the term originates from the golden age of analog electronics, its principles remain a cornerstone of how we understand temporal data, signal delays, and the filtration of noise in modern flight technology.
As drones become more autonomous and their stabilization systems more precise, the need to manage the flow of electronic information becomes paramount. A Bucket Brigade Device is essentially an analog delay line, a circuit that allows an electronic signal to be “held” and passed along a series of stages. In the niche of flight technology, understanding the BBD is not just a lesson in history; it is an exploration of how we manage the “jitter” and “noise” that stand between a drone and perfectly stable flight.

The Mechanics of the Bucket Brigade Device
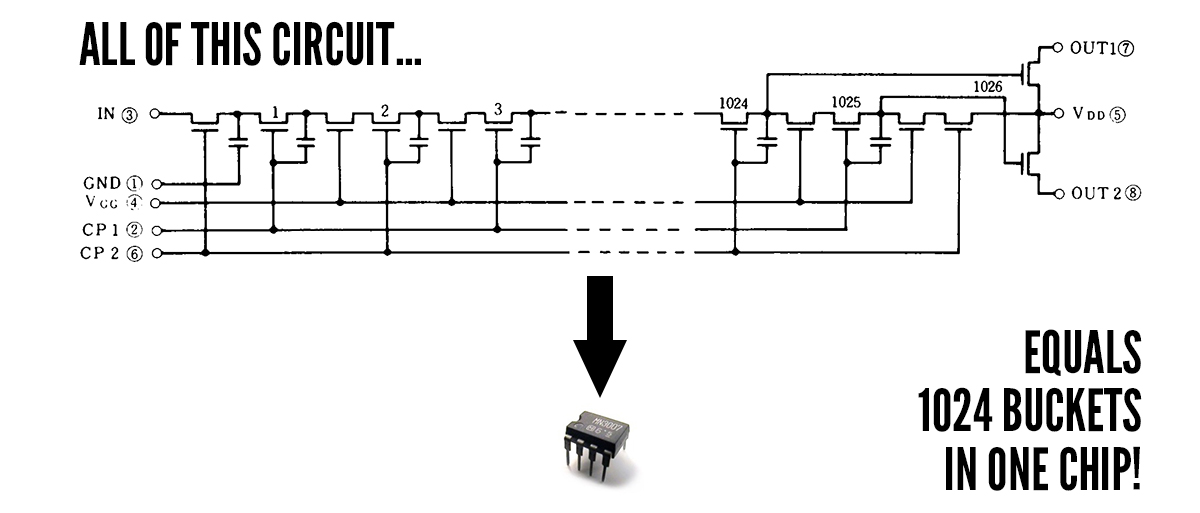
To understand the role of a BBD within flight technology, one must first grasp its physical operation. The name “Bucket Brigade” is a direct analogy to a line of firefighters passing buckets of water to reach a fire. In an electronic BBD, the “water” is the electrical charge, and the “firefighters” are a series of capacitors and transistors.
The Analog Delay Chain
At its core, a BBD consists of a sequence of sampling circuits. When an analog signal—such as the raw data from a drone’s gyroscope—enters the device, it is converted into a discrete charge. This charge is then stepped through a series of stages, driven by an external clock. Because the signal is moved in discrete steps but retains its original voltage level (analog), it allows for a precise delay without converting the signal into the binary 1s and 0s of digital processing.
In flight technology, this ability to delay a signal with high fidelity is crucial for time-alignment. When multiple sensors are feeding data into a flight controller, they may not all arrive at the same nanosecond. BBD-style logic helps in aligning these signals to ensure the stabilization algorithm is acting on a synchronized “snapshot” of the aircraft’s physical state.
Clock Frequency and Sampling Rates
The speed at which the “buckets” pass the “water” is determined by the clock frequency. In the context of UAV navigation, the sampling rate is the heartbeat of the aircraft. If the clock speed is too slow, the signal loses resolution (aliasing); if it is too fast, the hardware may struggle with power consumption or heat. BBD technology teaches us that the precision of flight stabilization is directly tied to the temporal resolution of our sensors. By manipulating the clock frequency, engineers can control exactly how much latency is introduced into a system, which is a vital component of tuning a drone’s PID (Proportional-Integral-Derivative) loops.
BBD Principles in Sensor Stabilization and Noise Reduction
One of the greatest enemies of stable flight is vibration. The high-speed rotation of brushless motors creates mechanical noise that can interfere with the sensitive Micro-Electro-Mechanical Systems (MEMS) found in modern flight controllers. This is where the concepts derived from BBD technology become essential to flight technology.
Filtering Mechanical Harmonics
In the early days of flight stabilization, and even in high-end experimental UAVs today, analog filtering is used to “smooth out” the raw data from accelerometers and gyroscopes. A BBD can be used to create a “comb filter.” By mixing the original signal with a delayed version of itself (the BBD output), certain frequencies—specifically the annoying mechanical harmonics of the drone’s motors—can be cancelled out.
This process, known as phase-cancellation, allows the flight technology to ignore the “shake” of the motors and focus exclusively on the actual tilt or rotation of the aircraft. Without these delay-based filtering techniques, a drone would likely vibrate uncontrollably as the flight controller tried to correct for its own motor noise.
Managing Latency in Feedback Loops
Every millisecond counts in flight technology. When a gust of wind hits a quadcopter, the sensors must detect the movement, the processor must calculate a correction, and the Electronic Speed Controllers (ESCs) must adjust the motor RPM. This entire cycle is a feedback loop.
BBD technology provides a framework for understanding and managing the inherent latency in these loops. While modern systems are largely digital, the “bucket brigade” concept of moving data through stages is still how data buffers operate. Engineers use these principles to ensure that the data being used to stabilize the drone isn’t “stale.” If the data is delayed too much, the correction will be applied too late, leading to oscillations or a crash.
The Evolution: From Analog BBD to Digital Signal Processing (DSP)
While the physical BBD chip is less common in modern consumer drones than it was in 1970s audio equipment, its legacy lives on in Digital Signal Processing (DSP). The transition from analog delay lines to digital buffers represents one of the most significant leaps in flight technology.
The Shift to Discrete Time Signals
In a modern flight controller, the “buckets” are now memory registers in a microprocessor. However, the logic remains identical. The controller takes a sample of the sensor data, stores it in a buffer (the digital bucket brigade), and processes it over a specific time interval. The move to digital has allowed for much more complex “Kalman Filters.” These are advanced mathematical algorithms that predict the state of the drone by weighing the reliability of different sensors against each other.
The Kalman Filter effectively does what a BBD-based analog filter tried to do, but with far greater precision. It looks at the “delay” and the “noise” and decides which part of the signal is the “truth” of the drone’s position and which part is just environmental interference.
Real-Time Operating Systems (RTOS)
Flight technology today relies on Real-Time Operating Systems to manage the flow of data. These systems function like a highly optimized bucket brigade. Every task—from reading the GPS coordinate to calculating the motor output—is assigned a specific time slot. If a piece of data misses its “bucket,” the entire flight stability can be compromised. Understanding the BBD architecture helps engineers design these RTOS structures to be more resilient, ensuring that critical flight data always has a “path” to the processor without being delayed by less important tasks, like updating a telemetry log on an SD card.
Practical Applications in Advanced Navigation Systems
Beyond simple stabilization, BBD concepts are integrated into the more advanced facets of flight technology, such as Obstacle Avoidance and Optical Flow. These systems require the processing of massive amounts of data in real-time, where timing is everything.
Optical Flow and Velocity Estimation
Optical flow sensors use downward-facing cameras to track movement across the ground. To calculate velocity, the system must compare a current frame with a previous frame. This is, in essence, a visual bucket brigade. The first “frame” is held in a buffer (the delay) so it can be compared to the “incoming” frame. By analyzing the shift in pixels between these two timed points, the flight technology can determine exactly how fast the drone is moving, even without a GPS signal.
Redundancy and Error Correction
In high-end UAVs used for industrial mapping or cinematography, redundancy is key. These aircraft often use multiple IMUs (Inertial Measurement Units). The flight technology must “vote” on which sensor is providing the most accurate data. By using delay-line logic, the system can compare the current data from Sensor A with the slightly delayed data from Sensor B to check for drift or hardware failure. This temporal cross-referencing is a direct evolution of the signal-matching techniques pioneered by BBD hardware.
The Future of Signal Integrity in Autonomous Flight
As we look toward the future of flight technology—incorporating Artificial Intelligence and edge computing—the principles of the Bucket Brigade Device remain more relevant than ever. The goal is always the same: to move data from the environment to the motors with the highest possible fidelity and the lowest possible latency.
Analog-Digital Hybrids
There is a growing movement in tech innovation toward “neuromorphic computing” and advanced analog processing for AI. Some researchers suggest that returning to analog-style signal processing (like the BBD) for initial sensor filtration could significantly reduce power consumption in small drones. By filtering noise in the analog domain before it ever reaches the power-hungry digital processor, drones could achieve longer flight times and faster response speeds.

Conclusion: Why BBD Matters to the Pilot and Engineer
While the average drone pilot may never see a BBD chip, they feel its influence every time they take the sticks. The “locked-in” feeling of a high-performance racing drone or the rock-solid hover of a cinematic UAV is a result of decades of innovation in signal timing and delay management.
The Bucket Brigade Device represents the moment in tech history where we learned to master the flow of time within a circuit. In the realm of flight technology, mastering time is the difference between a machine that fights the air and one that dances through it. As we continue to push the boundaries of what UAVs can do, the humble “bucket brigade” remains a vital part of the DNA of every stabilization system, navigation sensor, and flight controller in the sky.