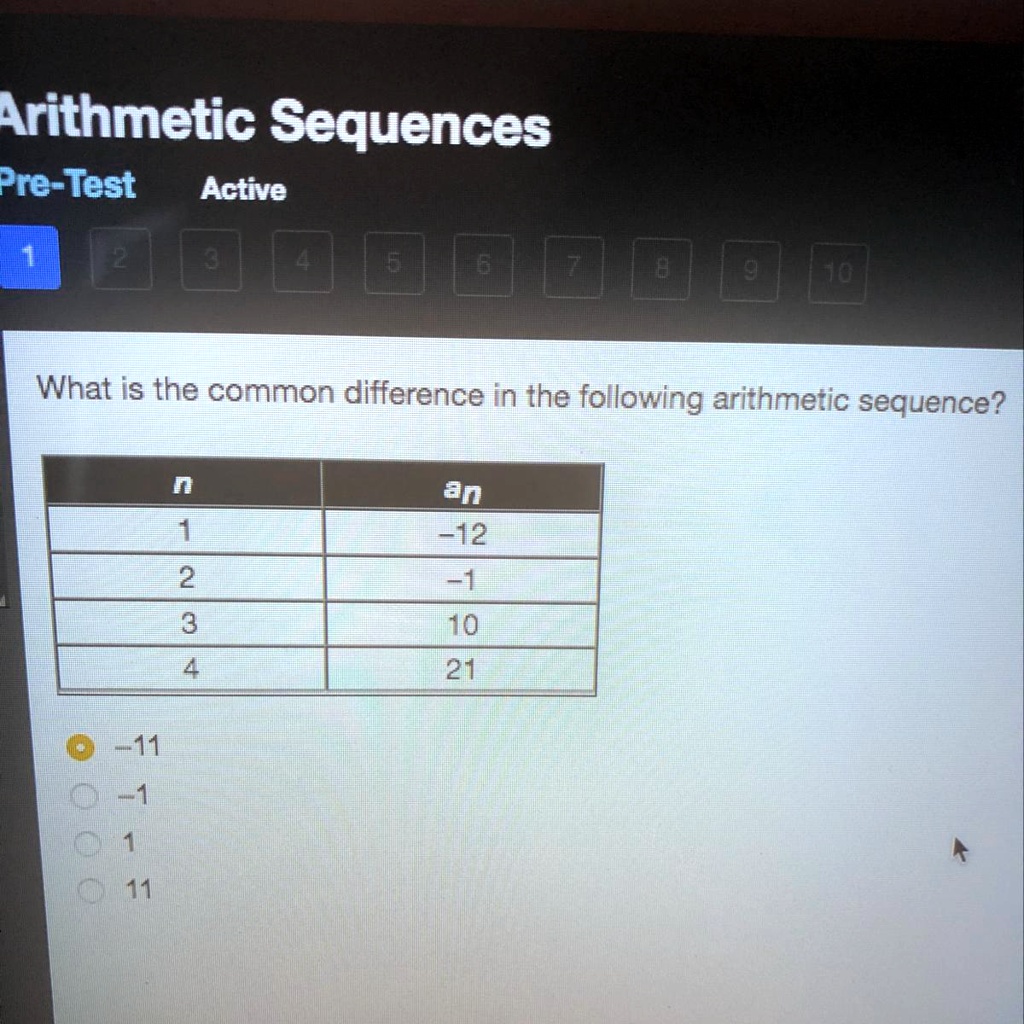
In the realm of unmanned aerial vehicles (UAVs), precision is not merely a luxury; it is the fundamental requirement for safety, efficiency, and data integrity. When we ask, “What is the common difference in the following arithmetic sequence?” we are usually solving a linear algebraic problem. However, in the context of drone tech and innovation—specifically regarding autonomous flight, remote sensing, and mapping—the “common difference” represents the physical and temporal intervals that dictate how a drone perceives and interacts with the world.
From the polling rate of a GPS module to the spacing of waypoints in a photogrammetry grid, arithmetic sequences form the mathematical skeleton of modern drone innovation. This article explores how these mathematical progressions are applied to autonomous systems, ensuring that every flight path is predictable, every data point is synchronized, and every autonomous decision is based on consistent, sequenced logic.

1. The Mathematical Architecture of Autonomous Waypoint Navigation
Autonomous flight relies on a pre-programmed set of coordinates known as waypoints. For a drone to cover a specific area systematically, these waypoints must follow a rigorous geometric pattern. When these points are laid out in a straight line with equal spacing, they form a spatial arithmetic sequence.
Defining the “Common Difference” in Waypoint Spacing
In drone navigation, the “common difference” is the specific distance (d) between two consecutive waypoints ($Wn$ and $W{n+1}$). For an autonomous mapping mission, if the first waypoint is at 10 meters from the home point and the common difference is 50 meters, the sequence of the flight path becomes 10, 60, 110, 160, and so on.
This consistency is vital for energy management and signal processing. If the common difference fluctuates unexpectedly due to poor programming or environmental interference, the drone’s flight controller may struggle to calculate the necessary thrust and pitch to reach the next coordinate, leading to “hunting” behavior—where the drone oscillates as it tries to correct its path. Innovation in AI-driven flight controllers now allows for “dynamic sequences,” where the common difference is adjusted in real-time based on wind resistance, yet the underlying logic remains rooted in arithmetic progression.
Linear Pathing vs. Algorithmic Progression
While basic drones use simple arithmetic sequences for movement, high-end innovation in Tech & Innovation involves complex algorithms that layer multiple sequences. For example, in a “Search and Rescue” (SAR) pattern, a drone might follow an expanding square pattern. Here, the arithmetic sequence might apply to the length of the legs of the flight path. If the first leg is 100 meters and the common difference is 20 meters, the drone flies 100m, then 120m, then 140m.
This mathematical predictability allows ground stations to calculate exactly where a drone should be at any given second ($T_n$). By solving for the common difference, engineers can optimize the time-to-completion for missions, ensuring that battery life is maximized while coverage remains comprehensive.
2. Remote Sensing and the Logic of Grid Mapping
Remote sensing is perhaps the most data-intensive application of drone technology today. Whether using LiDAR (Light Detection and Ranging) or multispectral cameras for agriculture, the quality of the output depends entirely on the “common difference” within the sampling interval.
Calculating the Step-Over in Photogrammetry
Photogrammetry is the process of stitching multiple aerial images together to create a 3D model or a 2D orthomosaic map. For the software to successfully “stitch” these images, there must be a consistent overlap (usually 70–80%). This overlap is maintained by ensuring a constant common difference in the trigger interval of the camera.
If a drone is flying at a constant velocity ($v$), the common difference in time ($Delta t$) between shutter releases determines the spatial distance between images. If $Delta t$ is inconsistent, the sequence of images will have gaps, leading to “holes” in the 3D map. Modern innovations in “TimeSync” technology—found in drones like the DJI Enterprise series—ensure that the common difference between the GPS timestamp and the image capture is reduced to milliseconds, allowing for centimeter-level accuracy in remote sensing.
Constant Velocity and Temporal Sequences in Data Collection
In LiDAR remote sensing, the drone emits thousands of laser pulses per second. These pulses are not random; they are a temporal sequence. The “common difference” here is the time interval between each pulse. Innovation in solid-state LiDAR has allowed for the reduction of this common difference, effectively increasing the “density” of the point cloud.
When a drone scans a bridge or a power line, the AI must account for the drone’s forward motion. If the drone speeds up but the pulse sequence remains at a fixed common difference, the resulting data “thins out.” The latest innovations involve “adaptive sequencing,” where the sensor’s firing rate (the sequence) accelerates or decelerates in a fixed arithmetic relationship to the drone’s ground speed, ensuring a perfectly uniform data density across the entire survey area.
3. Precision Agriculture and Sequence-Based Distribution
In the sector of agricultural drone technology, the “common difference” is applied to the distribution of payloads—whether that be liquid fertilizer, pesticides, or seeds. This is where arithmetic sequences transition from digital data into physical reality.
Flow Rate Adjustments as Arithmetic Variables
When a spray drone operates, it follows a “transect” or a pass across a field. To ensure even coverage, the flow rate of the nozzles must be synchronized with the drone’s speed. If the drone increases speed in increments (e.g., 2 m/s, 4 m/s, 6 m/s), the pump’s output must follow a corresponding arithmetic sequence to maintain the same volume of liquid per square meter.
Innovation in “Variable Rate Application” (VRA) technology uses AI to analyze crop health maps and then adjust the “common difference” in the distribution sequence. For example, as a drone moves from a healthy patch of crops to a nutrient-deficient patch, it may increase the dosage. The ability of the onboard computer to calculate these sequential adjustments in milliseconds is what separates professional-grade ag-drones from basic hobbyist models.
Maintaining Consistent Lateral Displacement
Beyond the forward movement, the distance between the “passes” (the lateral displacement) is a critical arithmetic sequence. If a drone’s spray swath is 5 meters, the common difference between each parallel flight line must be exactly 5 meters (or slightly less to allow for overlap).
Tech innovation in RTK (Real-Time Kinematic) GPS has made it possible to maintain this common difference with an error margin of less than 3 centimeters. Without this mathematical rigidity, farmers would face “striping”—areas of the field that are either double-dosed or completely missed—which can lead to crop damage or wasted resources.
4. The Impact of Sequence Consistency on AI and Machine Learning
The final frontier of drone innovation lies in how AI interprets the sequences it generates. In autonomous flight, an AI doesn’t just see a “path”; it sees a sequence of predicted states.
How Gaps in the Sequence Affect Point Cloud Generation
When a drone uses AI to generate a “Digital Twin” of a building, it relies on a sequence of data points. If the common difference between these points is inconsistent—due to signal “noise” or mechanical vibration—the AI’s neural network may misinterpret a gap in data as a physical hole in the structure.
Innovative “denoising” algorithms work by looking at the existing arithmetic sequence and “filling in” the missing values. By identifying the common difference in the surrounding data, the AI can mathematically predict where the missing point should have been. This predictive modeling is essential for autonomous inspections of critical infrastructure like wind turbines and cell towers, where safety prevents the drone from getting too close to the target.
Smoothing the Path: From Arithmetic to Calculus
As we look to the future of drone innovation, we see a shift from simple arithmetic sequences (linear movement) to more complex geometric and calculus-based progressions. However, the arithmetic sequence remains the “base layer.”
Autonomous “Follow Me” modes, which use AI to track a moving subject (like a mountain biker or a car), use sequences to predict the subject’s future position. The AI calculates the common difference in the subject’s velocity over the last five frames and projects that sequence forward to position the drone for the perfect shot. This integration of math and machine vision is the pinnacle of current UAV tech, proving that even the most advanced AI is still, at its heart, a master of sequences.

Conclusion: The Precision of the Sequence
When we revisit the question, “What is the common difference in the following arithmetic sequence?” in the context of drone tech and innovation, we find that the answer is the key to autonomy. Whether it is the distance between waypoints, the timing of a LiDAR pulse, or the spacing of a spray pattern, the “common difference” represents the precision that allows a drone to function as a professional tool rather than a toy.
As AI continues to evolve, the sequences will become more complex, and the intervals will become smaller and more precise. Yet, the fundamental logic of the arithmetic sequence will remain. For the engineers, pilots, and innovators shaping the future of flight, understanding these mathematical foundations is not just about solving a problem on paper—it is about ensuring that the drones of tomorrow are safer, more efficient, and more capable of transforming the world through data.