In the rapidly evolving landscape of unmanned aerial vehicles (UAVs) and autonomous systems, the software stack is just as critical as the hardware. Among the various programming languages used to bridge the gap between human instruction and machine execution, Python has emerged as the industry standard. At the heart of Python’s utility in drone technology is a fundamental process known as parsing.
Whether you are developing autonomous flight paths, analyzing multispectral imagery for precision agriculture, or managing real-time telemetry from a remote sensing platform, understanding what parsing is in Python—and how to implement it—is essential. In the context of tech and innovation, parsing is the mechanism that transforms raw, unorganized data into structured, actionable intelligence that a drone can use to navigate the world.
Understanding the Core Concept of Parsing in the Drone Ecosystem
At its simplest, parsing is the process of analyzing a string of symbols, either in natural language, computer languages, or data structures, conforming to the rules of a formal grammar. In the niche of drone technology and autonomous innovation, parsing acts as a translator. Drones generate and receive immense amounts of data in formats that are often compressed or serialized for speed. Parsing is what allows a Python script to “read” this data and make decisions based on it.
From Raw Strings to Structured Logic
When a drone’s onboard computer receives a signal from a ground control station or a localized sensor, that data often arrives as a “packet”—a dense string of binary or text. To a computer, a raw NMEA sentence from a GPS module looks like a jumble of characters: $GPRMC,123519,A,4807.038,N,01131.000,E,022.4,084.4,230394,003.1,W*6A.
Parsing in Python involves taking this string and breaking it down into its constituent parts: time, status, latitude, longitude, and speed. By using Python’s robust string manipulation or specialized libraries, developers convert these “dumb” strings into “smart” objects (like dictionaries or classes) that an autonomous flight algorithm can use to adjust its heading.
The Role of Python in Telemetry Interpretation
Telemetry is the lifeblood of remote sensing and autonomous flight. It includes real-time updates on battery voltage, pitch, roll, yaw, and altitude. For innovators working with ArduPilot or PX4 platforms, Python is often used via MAVLink (Micro Air Vehicle Link) to parse these telemetry streams.
Python’s ability to handle high-level data structures makes it ideal for this task. Instead of manually bit-shifting data in a low-level language like C++, Python developers use parsers to quickly extract the “health” of the drone, allowing for rapid prototyping of AI-driven safety features such as “Return to Home” (RTH) protocols triggered by specific parsed data points.
Key Libraries and Tools for Python Parsing in Drone Innovation
Innovation in the drone space is largely driven by the availability of open-source libraries. Python’s ecosystem is rich with tools designed to parse the specific types of data encountered in aerial mapping, remote sensing, and autonomous navigation.
MAVLink and PyMAVLink: Decoding Flight Data
MAVLink is the industry-standard communication protocol for drones. PyMAVLink is the Python implementation used to parse these messages. When a drone sends a message about its current mission state, PyMAVLink parses the binary stream into Python objects. This allows developers to write scripts that “listen” for specific events—such as a drone reaching a waypoint—and trigger secondary actions like a high-resolution camera shutter or a thermal sensor sweep.
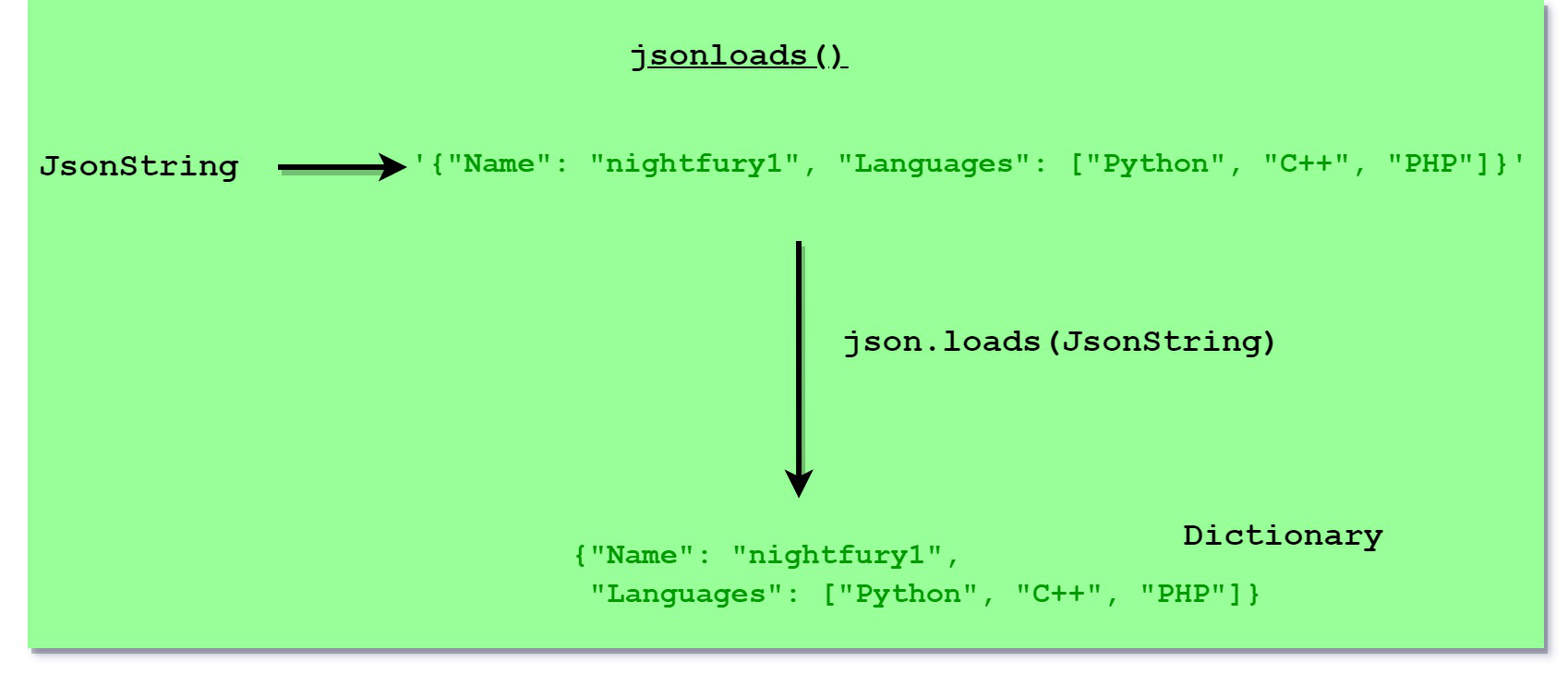
Handling JSON and GeoJSON for Mapping and Geographic Data
In the realm of mapping and remote sensing, data is frequently exchanged in JSON (JavaScript Object Notation) or GeoJSON formats. These are text-based formats that are easy for humans to read but require parsing for a machine to execute.
Python’s built-in json library is a powerhouse for this. For example, when a drone is performing an autonomous mapping mission of a forest fire, the boundary coordinates might be provided as a GeoJSON file. Python parses this file, extracting the coordinate arrays to define the drone’s geofence. Without efficient parsing, the autonomous system would be unable to interpret the boundaries of its mission area.
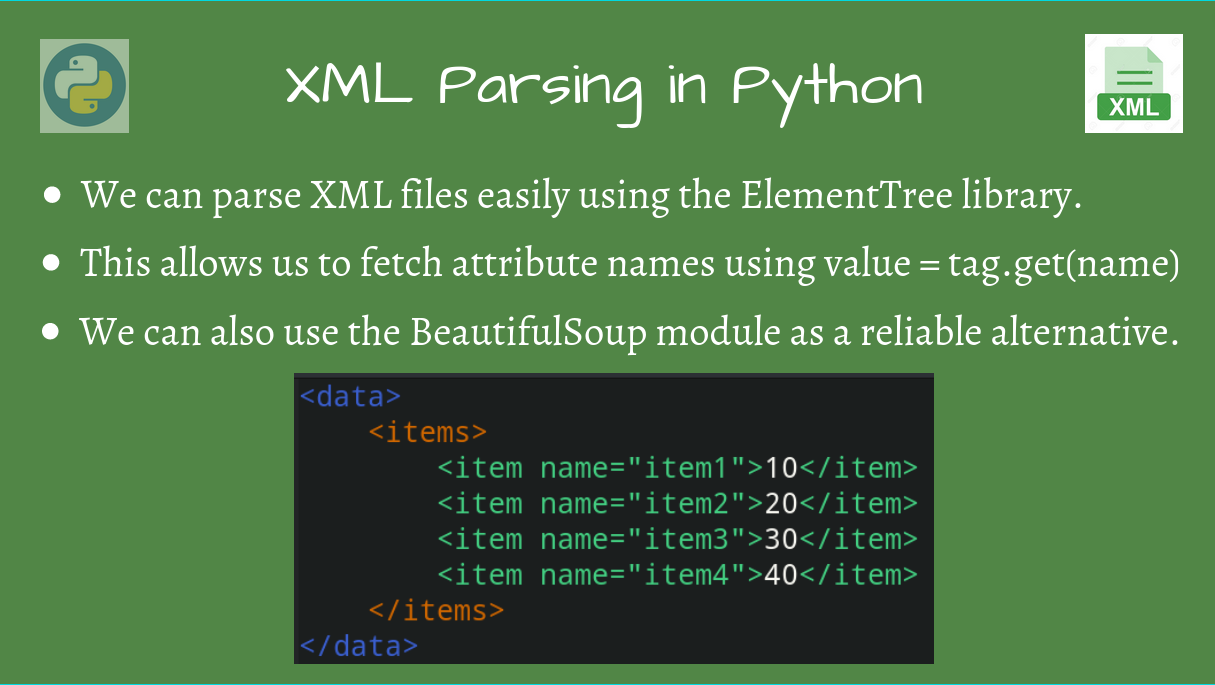
Processing XML and KML for Flight Paths
Keyhole Markup Language (KML) is an XML-based format used to display geographic data in Earth browsers like Google Earth. Many aerial filmmakers and mappers use KML to plan intricate flight paths. Parsing XML in Python—using libraries like ElementTree or lxml—is a common task for drone tech innovators. It allows for the extraction of “Placemarks” and “LineStrings,” which are then converted into a series of commands for the drone’s flight controller.
Practical Applications: Why Parsing Matters for Modern UAV Innovation
Parsing is not just a backend programming task; it is the foundation of several cutting-edge drone applications. As drones move from human-piloted tools to autonomous AI agents, the sophistication of their parsers must increase.
Real-time Sensor Fusion and Data Cleaning
Autonomous drones rely on sensor fusion—combining data from IMUs, GPS, LiDAR, and optical flow sensors to determine their position. Each of these sensors outputs data at different rates and in different formats. Python scripts act as the “parsing hub,” taking these disparate data streams, parsing them into a unified format, and cleaning out “noise” or outliers. This parsed and filtered data is what allows a drone to maintain a stable hover even in high-wind conditions or GPS-denied environments.
Post-Flight Analysis and Log Parsing
Innovation often happens after the flight. Modern flight controllers record thousands of data points per second to an onboard SD card in a .bin or .log format. To make sense of this data, developers use Python to parse these logs.
By parsing the flight logs, engineers can visualize the drone’s performance, identifying vibrations in the motors or inconsistencies in the power delivery. In the niche of Tech & Innovation, this is known as “black box” analysis, and it is vital for iterative design. Python libraries like Pandas are frequently used here to parse log data into dataframes for statistical analysis and machine learning.
Interfacing with AI Models for Object Detection
In autonomous flight modes where a drone “follows” a subject or identifies an object (like a crack in a bridge or a specific plant type), parsing plays a role in interpreting the output of the neural network. An AI model might output a raw tensor—a series of numbers representing probability and coordinates. A Python parser takes that output and converts it into a bounding box with a label: “Person: 98% confidence.” This parsed information is then sent to the gimbal controller to keep the camera centered on the subject.
Advanced Techniques: Automation and Remote Sensing
As we push the boundaries of what drones can do, the parsing requirements become more complex, especially in the fields of LiDAR and multispectral remote sensing.
Parsing LiDAR and Multispectral Data
LiDAR (Light Detection and Ranging) produces massive “point clouds.” These are sets of data points in space, often saved in .LAS or .LAZ formats. Parsing these files requires specialized Python libraries like Laspy. Innovation in autonomous mapping depends on the ability to parse these millions of points to identify obstacles or create 3D digital twin models of infrastructure.
Similarly, in remote sensing, multispectral cameras capture light outside the visible spectrum. Python is used to parse the metadata of these images (EXIF data), which includes the sun’s angle, the sensor’s gain, and the GPS location at the exact microsecond the image was taken. This parsing is essential for “stitching” images together into a coherent, georeferenced map.
Scripting Autonomous Missions with Python
The future of drone innovation lies in “Swarm Intelligence” and fully autonomous fleet management. This requires drones to communicate with each other. When Drone A finds a target, it sends a parsed data packet to Drone B. Python’s socket programming and parsing capabilities allow these drones to negotiate their positions in the air, preventing collisions and ensuring efficient coverage of a search area.
Challenges and Best Practices in Flight Data Parsing
While Python makes parsing accessible, the high-stakes environment of drone technology introduces specific challenges that innovators must navigate.
Speed vs. Accuracy in Real-time Environments
Python is an interpreted language, which means it can be slower than compiled languages like C++. In a drone flying at 40 mph, a delay of a few milliseconds in parsing an obstacle avoidance sensor’s data can be catastrophic. Therefore, drone tech innovators must optimize their Python parsers. Using libraries like NumPy for vectorized parsing or Cython to compile critical parsing paths can provide the necessary speed without sacrificing the flexibility of Python.
Error Handling and Data Integrity
In the field, data is often “dirty.” Radio interference can drop bits, and sensors can fail. A robust Python parser for drone tech must include sophisticated error handling. If a parser encounters a malformed packet, it shouldn’t crash the entire flight script. Instead, it must be programmed to discard the corrupt data, log the error, and maintain the drone’s current state based on the last known “good” data. This level of resilience is what separates a hobbyist script from a professional autonomous system.
Conclusion: The Future of Python in Drone Innovation
Parsing in Python is far more than a simple coding exercise; it is the digital connective tissue that allows drones to perceive, interpret, and react to their environment. As we move toward a future of fully autonomous UAVs, the ability to efficiently parse complex data from AI models, remote sensors, and satellite links will be the primary differentiator in drone innovation.
For the engineer, the aerial filmmaker, or the remote sensing specialist, mastering Python’s parsing capabilities is the key to unlocking the full potential of flight technology. By turning raw data into structured knowledge, parsing enables the intelligent flight paths and deep insights that define the next generation of tech and innovation in the skies.