In the rapidly evolving landscape of unmanned aerial vehicles (UAVs) and sophisticated flight systems, the term “quadrants” serves as a foundational concept that bridges the gap between abstract mathematics and tangible physical movement. While a layperson might simply see a drone as a device with four propellers, a flight engineer or a specialized pilot views the aircraft through the lens of spatial partitioning, thrust distribution, and navigational sectors. Understanding quadrants is essential for mastering the mechanics of stabilization, the precision of GPS-guided missions, and the complexity of obstacle avoidance systems.
This article explores the multifaceted role of quadrants within the niche of flight technology, detailing how these geometric divisions dictate everything from how a flight controller balances a hovering craft to how global positioning systems define a drone’s place in the three-dimensional sky.
The Fundamental Role of Quadrants in Spatial Orientation
At the heart of every flight stabilization system lies a rigorous adherence to coordinate geometry. To maintain level flight or execute precise maneuvers, the onboard flight computer must divide the world around the aircraft into manageable segments.
The Cartesian Coordinate System in Flight
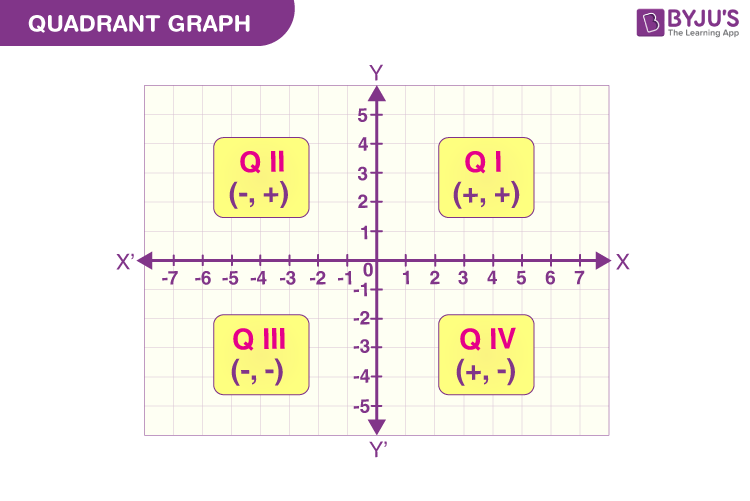
Flight technology relies heavily on the Cartesian coordinate system, where the drone’s center of gravity acts as the origin point (0,0,0). By dividing the horizontal plane into four distinct quadrants—defined by the X (longitudinal) and Y (lateral) axes—the flight controller can categorize its movement.
Quadrant I represents the front-right area, Quadrant II the front-left, Quadrant III the back-left, and Quadrant IV the back-right. This mathematical mapping allows the Inertial Measurement Unit (IMU) to translate sensor data into directional commands. When a pilot pushes the pitch stick forward, the flight controller understands that it needs to transition the craft’s weight and thrust profile across these quadrants to move along the X-axis.
Yaw, Pitch, and Roll: Navigating the 3D Quadrant
While 2D quadrants handle the horizontal plane, flight technology extends this into the third dimension using the Z-axis. This creates octants (eight sections), but in pilot terminology, we still focus on the quadrant-based behavior of the aircraft’s rotation.
The stabilization system constantly monitors the “quadrant bias.” If a gust of wind hits the drone from the front-left (Quadrant II), the gyroscopes and accelerometers detect a deviation in pitch and roll. The flight controller must then instantaneously calculate the counter-force required in the opposing quadrant to maintain equilibrium. This process, known as the PID (Proportional, Integral, Derivative) loop, happens hundreds of times per second, ensuring that the aircraft remains stable despite external pressures.
Motor Quadrants and Thrust Vectoring Dynamics
The most literal application of quadrants in drone technology is found in the physical layout of the motors. In a quadcopter configuration, the four motors are positioned in a square or “X” pattern, each occupying a specific quadrant relative to the flight controller.
Clockwise vs. Counter-Clockwise Dynamics
For a drone to remain stable and capable of rotation (yaw), the motors in diagonally opposite quadrants must spin in the same direction. For instance, motors in Quadrants I and III typically spin counter-clockwise (CCW), while motors in Quadrants II and IV spin clockwise (CW).
This configuration is a masterclass in Newtonian physics. By varying the torque between these quadrants, the flight technology can induce a yaw movement without changing the drone’s altitude. If the flight controller increases the power to the CW motors in Quadrants II and IV while decreasing it in the CCW motors, the drone will rotate. Understanding these motor quadrants is vital for troubleshooting hardware failures or tuning the craft for high-performance flight.
How Flight Controllers Manage Power Distribution
The “Brain” of the drone—the flight controller—doesn’t just send a uniform signal to all motors. Instead, it manages a complex distribution of power across the quadrants. This is particularly evident during “thrust vectoring” or aggressive maneuvering.
When a drone performs a banking turn, the flight controller must increase the RPM of the motors on the outer edge of the turn (the exterior quadrants) while reducing power to the interior quadrants. This differential thrust creates the necessary lift and centripetal force to navigate the curve. Modern Electronic Speed Controllers (ESCs) use DShot or other digital protocols to communicate these quadrant-specific power adjustments with microsecond precision, allowing for the buttery-smooth flight characteristics seen in high-end UAVs.
GPS and Geographic Quadrants for Autonomous Missions

Moving from the internal mechanics of the drone to its interaction with the planet, quadrants play a vital role in global navigation satellite systems (GNSS). For a drone to fly autonomously, it must understand its position within the global geographic quadrants.
Latitude and Longitude Sectoring
The Earth itself is divided into four primary geographic quadrants based on the Prime Meridian and the Equator: Northeast, Northwest, Southeast, and Southwest. When a flight technician programs a waypoint mission, the drone’s GPS receiver calculates its position by triangulating signals from multiple satellites.
The navigation software interprets these coordinates to ensure the drone stays within its assigned “operational quadrant.” This is critical for long-range missions where the drone might cross from one hemisphere to another or move between different magnetic declination zones. The flight technology must account for these changes to ensure that “North” remains consistent in the drone’s internal compass.
Geofencing: Creating Virtual Boundaries
One of the most important safety features in modern flight technology is geofencing. This system uses quadrant-based logic to create virtual boundaries that the drone cannot cross. By defining a set of coordinates, the user creates a “safe quadrant” for flight.
If the drone’s GPS data suggests it is approaching the edge of this quadrant, the flight technology will automatically override pilot input to prevent a flyaway. This is achieved through a “look-ahead” algorithm that calculates the drone’s current velocity and trajectory, determining if it will exit the authorized quadrant within a specific timeframe. If the answer is yes, the system applies regenerative braking or initiates an automated Return to Home (RTH) sequence.
Advanced Sensor Integration and Quadrant Mapping
As we move toward fully autonomous flight, the role of quadrants has expanded into the realm of environmental perception. Obstacle avoidance systems use “sector scanning” to partition the space around the drone into quadrants to identify hazards.
Obstacle Avoidance and Sector Scanning
Sophisticated drones equipped with LiDAR, ultrasonic sensors, or stereo vision cameras don’t just “see” an object; they categorize it based on which quadrant it occupies relative to the flight path. For example, if a sensor detects a tree in the “Front-Right Quadrant,” the obstacle avoidance system calculates a new trajectory that shifts the drone into the “Front-Left” or “Rear” quadrants to bypass the danger.
This quadrant-based environmental mapping is what allows drones to navigate complex environments like forests or construction sites. By breaking down a 360-degree view into manageable 90-degree quadrants, the onboard processor can prioritize data. Threats in the direct path (the forward quadrant) receive more computational resources than static objects in the rear quadrant.
Optical Flow and Relative Positioning
In environments where GPS is unavailable—such as indoors or under dense canopies—flight technology relies on Optical Flow sensors. These sensors track the movement of patterns on the ground to determine position.
The optical flow system divides the camera’s field of view into quadrants to detect movement. If the pixels in the “Left Quadrants” are moving faster than those in the “Right Quadrants,” the system realizes the drone is drifting sideways and applies a corrective tilt. This quadrant-based visual odometry is the secret behind the rock-solid hovering capabilities of modern professional drones in GPS-denied environments.
The Future of Quadrant-Based Navigation in Swarm Intelligence
Looking forward, the concept of quadrants is becoming central to the development of drone swarms and urban air mobility (UAM). As the skies become more crowded, the ability for aircraft to communicate their “quadrant occupancy” will be the key to avoiding mid-air collisions.
In a swarm, each drone maintains a “personal quadrant” or “bubble” of airspace. Using V2V (Vehicle-to-Vehicle) communication, drones share their quadrant data with one another. If Drone A’s forward-right quadrant begins to overlap with Drone B’s rear-left quadrant, the flight stabilization systems of both aircraft will coordinate a subtle adjustment to maintain a safe distance.
Furthermore, in the context of “Smart Cities,” the airspace will likely be divided into permanent digital quadrants. Flight technology will be required to check in and out of these sectors, much like how traditional aircraft move between Air Traffic Control (ATC) sectors today. This macro-level quadrant management will enable the safe integration of delivery drones, emergency response UAVs, and passenger-carrying air taxis into our daily lives.
In conclusion, “quadrants” are far more than just a geometric term in the world of flight technology. They are the scaffolding upon which stabilization, navigation, and autonomy are built. From the micro-adjustments of a motor’s RPM to the global mapping of a cross-continental flight path, the quadrant remains the essential unit of spatial logic that keeps our drones in the air and on course. As sensors become more sensitive and processors more powerful, our ability to slice, analyze, and navigate these quadrants will only continue to reach new heights of precision.