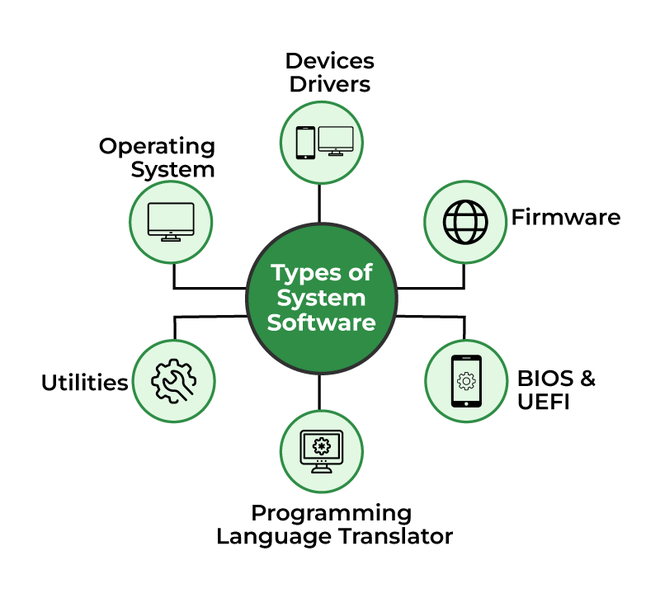
Computer system software forms the foundational layer upon which all other applications and user interactions are built. It’s the invisible architect, the silent conductor, orchestrating the complex symphony of hardware components and user commands. Without system software, a powerful drone would be nothing more than an inert collection of plastic, metal, and electronics. This essential layer of digital intelligence governs everything from basic power management to sophisticated flight control algorithms, enabling the complex aerial maneuvers and advanced functionalities that define modern UAVs.
The Operating System: The Brain of the Drone
At the heart of every computer system, including those powering advanced drones, lies the operating system (OS). For drones, the OS is more than just a user interface; it’s the central nervous system, managing resources, facilitating communication between hardware and software, and providing a stable environment for all other operations. Unlike the desktop or mobile OSs we’re familiar with, drone operating systems are often highly specialized, optimized for real-time performance, low power consumption, and robust reliability in challenging environments.
Real-Time Operating Systems (RTOS)
Many advanced drones utilize Real-Time Operating Systems (RTOS). The defining characteristic of an RTOS is its ability to process data and respond to events within strict, predictable time constraints. In the context of a drone, this is absolutely critical. Imagine a drone encountering an unexpected obstacle. The sensors detect the anomaly, the OS must process this data instantaneously, and the flight controller must issue commands to alter the drone’s trajectory – all within milliseconds. A delay could mean a crash. RTOSs achieve this predictability through features like preemptive multitasking, deterministic scheduling algorithms, and minimal interrupt latency. They prioritize critical tasks, ensuring that life-or-death decisions for the drone are made on time, every time. Popular examples of RTOS kernels found in embedded systems, including those used in drones, include FreeRTOS, VxWorks, and QNX.
Resource Management and Scheduling
The OS is responsible for allocating and managing the drone’s finite resources. This includes processor time, memory, and access to peripheral hardware like GPS modules, gyroscopes, accelerometers, and communication transceivers. Sophisticated scheduling algorithms ensure that these resources are utilized efficiently. For instance, during a complex aerial maneuver requiring high-precision control, the flight control software will be given priority access to processing power, while background tasks like logging flight data might be de-prioritized. Conversely, during a stable hover, resource allocation might shift to prioritize sensor data acquisition for mapping or imaging.
Interfacing with Hardware
A crucial role of the OS is to abstract the complexities of the underlying hardware from the application software. This is achieved through device drivers. For a drone, these drivers act as translators, allowing the OS and applications to communicate with a wide array of specialized sensors and actuators without needing to understand the intricate low-level details of each component. Whether it’s reading precise altitude data from a barometric pressure sensor, interpreting magnetometer readings for heading, or commanding the speed of individual motors, device drivers ensure seamless hardware interaction. This modularity also makes it easier to upgrade or replace hardware components without requiring a complete rewrite of the core system software.
Firmware: The Embedded Intelligence
While the OS provides the overarching management structure, firmware is the highly specialized software embedded directly into the drone’s hardware components, particularly the flight controller, Electronic Speed Controllers (ESCs), and even some intelligent sensors. Firmware is the direct command and control layer, responsible for executing the low-level instructions that keep the drone airborne and responsive.
The Flight Controller Firmware
The flight controller is arguably the most critical piece of hardware on a drone, and its firmware is the brain that dictates its flight behavior. This firmware takes raw sensor data – from gyroscopes, accelerometers, magnetometers, GPS, and often barometers – and translates it into precise commands for the motors. It implements complex algorithms for stabilization, navigation, and flight mode execution.
Stabilization Algorithms
At its core, flight controller firmware is designed to keep the drone stable. Using data from inertial measurement units (IMUs) comprising gyroscopes and accelerometers, it detects any deviations from the desired orientation. PID (Proportional-Integral-Derivative) controllers are a ubiquitous technique employed here. The firmware constantly calculates the error between the desired state and the current state, and applies corrective actions to the motors to counteract any unwanted movement. This continuous, high-frequency feedback loop is what allows a drone to hover steadily even in gusty winds.
Navigation and Flight Modes
Beyond basic stabilization, flight controller firmware enables advanced navigation and a variety of flight modes. This includes:
- GPS Navigation: Interpreting GPS signals to hold position, follow pre-programmed waypoints, or return to a designated home point.
- Autonomous Flight: Executing complex pre-planned flight paths for tasks like aerial mapping, inspection, or surveying.
- Intelligent Flight Modes: Features like “ActiveTrack” (following a subject), “Orbit” (circling a point of interest), or “Waypoint Navigation” are all managed by the flight controller firmware, often in conjunction with higher-level processing units.

Electronic Speed Controller (ESC) Firmware
Each motor on a drone is controlled by an Electronic Speed Controller (ESC). The firmware on these ESCs translates the digital commands from the flight controller into analog signals that control the speed of the brushless DC motors. Modern ESC firmware is highly optimized for efficiency and responsiveness, managing aspects like motor timing, braking, and even regenerative braking to improve battery life. Advanced ESCs can also provide telemetry data back to the flight controller, such as motor temperature or RPM, further enhancing system awareness and control.
Middleware and System Services
Between the core OS and the end-user applications (like camera control or mission planning software) lies a layer of middleware and system services. These components provide common functionalities and facilitate communication, simplifying application development and enhancing the overall system’s capabilities.
Communication Protocols
Drones rely on a sophisticated network of communication. System software includes the protocols and drivers that manage these connections. This ranges from low-level radio frequency (RF) communication protocols used for remote control signals and video transmission to higher-level network protocols for data logging, telemetry, and communication with ground control stations or companion computers. Efficient and reliable communication is paramount for safe and effective drone operation.
Data Management and Logging
A significant function of system software is managing the vast amounts of data generated by a drone. This includes sensor readings, flight telemetry, video streams, and mission logs. System services handle data buffering, formatting, and storage, often writing data to onboard storage or streaming it wirelessly. Robust data logging is crucial for post-flight analysis, troubleshooting, and meeting regulatory requirements.
System Health Monitoring and Diagnostics
System software continuously monitors the health and performance of various drone components. This includes checking battery levels, motor temperatures, sensor readings, and GPS signal strength. If an anomaly is detected, the system software can trigger alerts, initiate safety protocols (like an emergency landing), or provide diagnostic information to the operator or ground station for troubleshooting. This proactive health monitoring is vital for preventing failures and ensuring operational safety.
The Synergy of System Software in Advanced Drone Capabilities
The sophisticated capabilities of modern drones, from complex autonomous missions to professional aerial cinematography, are only possible due to the intricate interplay of their underlying system software.
Autonomous Flight and AI Integration
The move towards autonomous flight, powered by artificial intelligence (AI), relies heavily on the system software infrastructure. A companion computer, often running a more powerful OS like Linux, might handle the AI processing for object recognition, path planning, and decision-making. However, this companion computer must seamlessly integrate with the drone’s core flight controller firmware and OS. System software facilitates this communication, ensuring that AI-driven insights are translated into actionable flight commands in real-time. Techniques like ROS (Robot Operating System), a flexible framework for writing robot software, are often employed to manage these complex interactions between different software components and hardware.
Advanced Imaging and Sensor Fusion
When a drone’s system software is tasked with advanced imaging, such as operating a gimbal-stabilized 4K camera or a thermal sensor, it’s not just about capturing raw data. The system software manages the communication between the camera, the gimbal control system, and the flight controller. It ensures that camera settings are optimized based on flight conditions and that the gimbal accurately tracks the subject or maintains a desired framing, even during dynamic flight maneuvers. Sensor fusion, the process of combining data from multiple sensors (e.g., visual cameras, LiDAR, radar) to create a more comprehensive understanding of the environment, is another area where advanced system software plays a critical role. This allows for sophisticated obstacle avoidance, precise navigation in GPS-denied environments, and detailed environmental mapping.
Software Updates and Maintainability
Like any complex computer system, drone system software requires updates to improve performance, introduce new features, and patch security vulnerabilities. The system software defines the mechanisms for over-the-air (OTA) updates or firmware flashing, ensuring that drone operators can maintain their aircraft with the latest capabilities and security patches. This continuous evolution of system software is key to the ongoing advancement of drone technology.
In conclusion, computer system software is the invisible yet indispensable backbone of any modern drone. From the real-time precision of the operating system and firmware to the facilitating role of middleware and system services, this software layer empowers drones to perform their incredible feats, pushing the boundaries of what’s possible in the sky.