The digital heart of many advanced drone systems beats with the rhythm of binary operations. Among these fundamental building blocks of computation, the bitwise AND operation stands out as a crucial tool for efficient data manipulation, particularly in the realm of sensor fusion, data filtering, and state management within Unmanned Aerial Vehicles (UAVs). Understanding bitwise AND is not just an academic exercise for drone engineers and enthusiasts; it’s a gateway to comprehending how complex systems interpret and react to their environment with precision and speed.
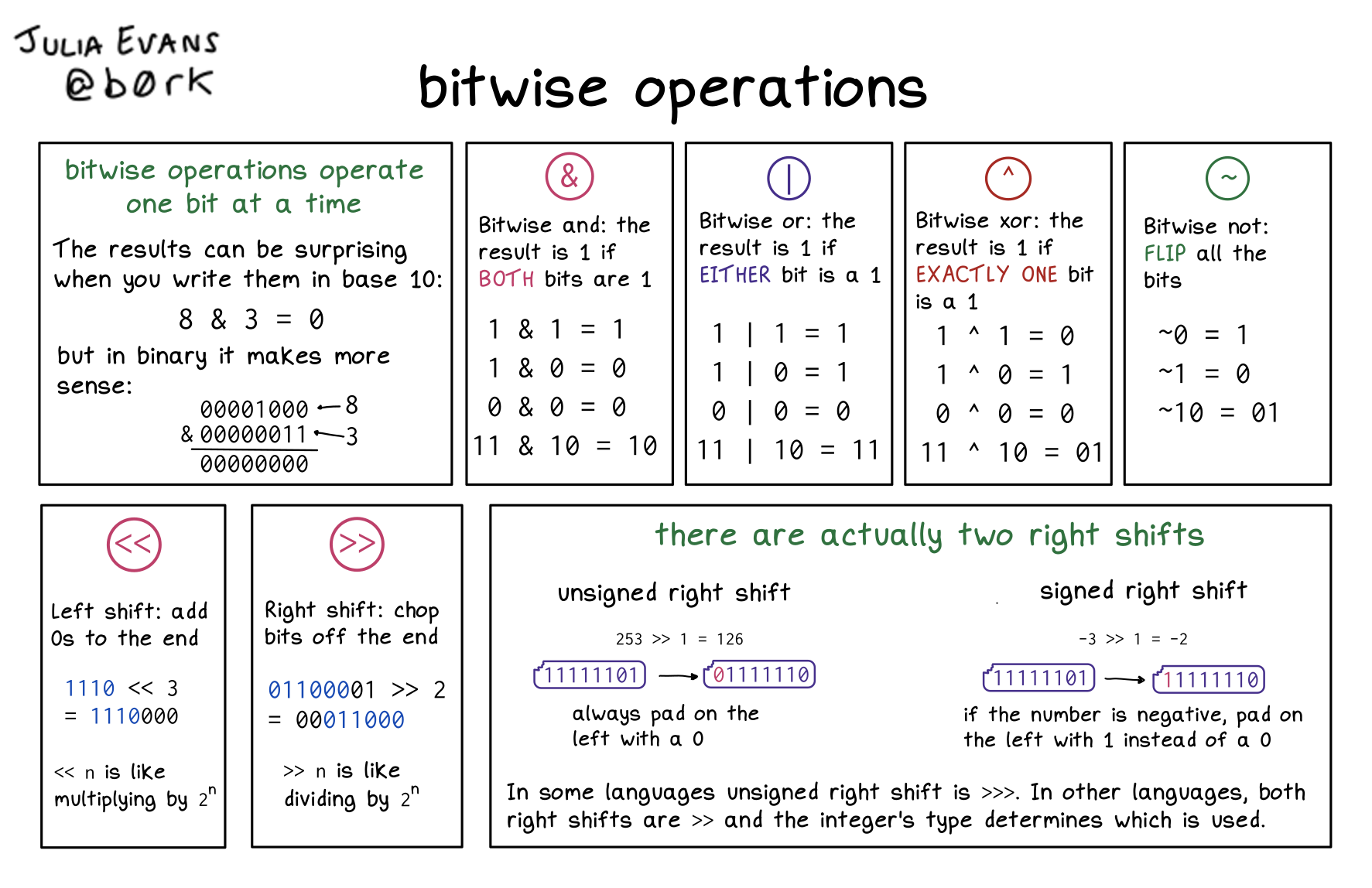
At its core, a bitwise AND is a logical operation performed on corresponding bits of two binary numbers. For each bit position, the result is 1 only if both input bits are 1. Otherwise, the result is 0. This simple rule, when applied across entire binary words, enables powerful and compact data processing. In the context of drones, where every millisecond and every byte counts, bitwise operations offer a streamlined approach to tasks that would otherwise require more complex, computationally expensive instructions.
The Foundation: Binary Logic and Bitwise Operations
To fully grasp the significance of bitwise AND in drone technology, we must first establish a foundational understanding of binary numbers and the logic gates that underpin digital computation.
Binary Representation
Computers and embedded systems, the brains of any modern drone, operate using binary code – a system of two digits, 0 and 1. These digits, or “bits,” are the smallest units of data. Larger pieces of information, such as sensor readings, control commands, or system status flags, are represented by sequences of these bits, forming binary numbers. For instance, an 8-bit byte can represent numbers from 0 (00000000 in binary) to 255 (11111111 in binary).
Logical Operations
Digital circuits are built upon logic gates, which perform basic logical operations. The AND gate is a fundamental example. It takes two inputs and produces a single output. The output is true (1) only if both inputs are true (1); otherwise, the output is false (0). This concept is directly translated into the bitwise AND operation.
The Bitwise AND Operator
When we talk about bitwise AND, we are referring to an operation that applies the AND logic to each pair of corresponding bits in two binary numbers, independently. Consider two 8-bit numbers:
Number A: 11010010
Number B: 10110100
To perform a bitwise AND, we align the numbers and apply the AND operation to each column:
11010010 (A)
& 10110100 (B)
----------
10010000 (Result)
Let’s break this down bit by bit, from left to right:
- Bit 1: 1 AND 1 = 1
- Bit 2: 1 AND 0 = 0
- Bit 3: 0 AND 1 = 0
- Bit 4: 1 AND 1 = 1
- Bit 5: 0 AND 0 = 0
- Bit 6: 0 AND 1 = 0
- Bit 7: 1 AND 0 = 0
- Bit 8: 0 AND 0 = 0
The resulting binary number is 10010000. This operation effectively “filters” the bits of the first operand (A) based on the bits of the second operand (B). Where B has a 0, the corresponding bit in the result is guaranteed to be 0, regardless of A’s bit. Where B has a 1, the corresponding bit in the result will match A’s bit.
Applications of Bitwise AND in Drone Systems
The efficiency and control offered by bitwise AND make it indispensable in various subsystems within a drone. Its ability to selectively enable, disable, or test specific bits within a data word is leveraged for tasks ranging from basic status checking to sophisticated sensor data interpretation.
Sensor Data Masking and Filtering
Drones are equipped with an array of sensors: accelerometers, gyroscopes, magnetometers, barometers, GPS receivers, lidar, cameras, and more. Each sensor generates data, often represented as numerical values or status flags packed into bytes or words. Bitwise AND plays a vital role in isolating specific pieces of information or filtering out noise.
Isolating Specific Sensor Readings
Imagine a status byte where each bit represents the operational status of a different sensor. For example:
- Bit 0: Accelerometer Ready
- Bit 1: Gyroscope Ready
- Bit 2: GPS Fix Acquired
- Bit 3: Barometer Healthy
- Bit 4: Lidar Operational
- Bits 5-7: Reserved
If the current status byte is 00010111 (binary), this indicates that the accelerometer, gyroscope, and GPS are ready, and the barometer is healthy. To check if the GPS is fixed (bit 2), we can use a bitwise AND with a “mask” value. The mask has a 1 only at the bit position we’re interested in, and 0s elsewhere.
To check for GPS fix (bit 2), the mask would be 00000100 (binary, or 4 in decimal).
00010111 (Status Byte)
& 00000100 (GPS Mask)
----------
00000100 (Result)
If the result of the bitwise AND is non-zero (in this case, 00000100 which is 4), it means the corresponding bit in the status byte was also 1, indicating the GPS fix is indeed acquired. If the result were 0, the GPS fix would not be acquired. This is significantly more efficient than checking numerical ranges or performing complex conditional logic for each individual bit.
Clearing Unwanted Data Bits
In some scenarios, sensor data might contain extraneous bits that need to be ignored. Bitwise AND with a mask of 1s for the desired bits and 0s for the unwanted bits can effectively “zero out” the irrelevant information, leaving only the data of interest. This is a form of data sanitization.
State Management and Control Flags
Drone flight controllers manage a multitude of internal states and configurations. Bitwise operations are frequently used to manage sets of flags that represent these states.
Enumerated Types and Flags
Many programming languages support enumerated types (enums), which can be combined with bitwise operations to create powerful flag sets. Each value in an enum can represent a unique bit position within an integer.
For instance, a control mode might be represented by a byte where different bits signify different operational modes or capabilities:
MODE_MANUAL(1 << 0) =00000001MODE_ALT_HOLD(1 << 1) =00000010MODE_POSITION_HOLD(1 << 2) =00000100MODE_WAYPOINT_NAV(1 << 3) =00001000MODE_RTL(1 << 4) =00010000
A drone might be operating in a combination of ALT_HOLD and POSITION_HOLD. The current mode could be represented by MODE_ALT_HOLD | MODE_POSITION_HOLD, resulting in 00000110 (binary, or 6 in decimal).
To check if POSITION_HOLD is active, we would perform a bitwise AND:
00000110 (Current Modes)
& 00000100 (MODE_POSITION_HOLD Mask)
----------
00000100 (Result)
Since the result is non-zero and equal to the MODE_POSITION_HOLD mask, we know POSITION_HOLD is active. This allows for a single variable to represent multiple independent states simultaneously.
Enabling/Disabling Features
Similarly, features or sub-systems can be toggled on or off using bitwise OR for enabling and bitwise AND with a complemented mask for disabling. To disable ALT_HOLD from our example 00000110 mode:
The mask for ALT_HOLD is 00000010.
The complement of this mask is 11111101.
00000110 (Current Modes)
& 11111101 (Complement of ALT_HOLD Mask)
----------
00000100 (Result)
The result 00000100 now correctly represents only POSITION_HOLD mode.
Communication Protocols and Data Packing
Many drone communication protocols, especially low-level ones for inter-component communication (e.g., between the flight controller and ESCs, or between different modules), use bit-packed data structures to maximize bandwidth and minimize latency. Bitwise AND is essential for extracting specific fields from these packed data packets.
For instance, a control packet might contain multiple commands or parameters within a single byte. A section of the packet might use a few bits to indicate the desired motor direction and other bits for a specific thrust setting. Bitwise AND is used to isolate each of these fields for proper interpretation.
Hardware Register Manipulation
Embedded microcontrollers that power drone flight controllers and other modules interact with hardware through special memory addresses called “registers.” These registers control the behavior of peripherals like UART, SPI, I2C, PWM generators, and ADC converters. Each bit within a register often corresponds to a specific setting or flag.
For example, a control register might have bits that enable or disable interrupts, set the data transmission rate, or configure the operating mode of a peripheral. To modify a single bit without affecting others, engineers use bitwise AND (often in conjunction with bitwise OR) to set or clear specific bits in these registers.
Consider a hypothetical register CONFIG_REG for a communication module:
- Bit 0:
ENABLE_TRANSMISSION - Bit 1:
RECEIVE_ENABLE - Bit 2:
ERROR_FLAG - Bits 3-7: Reserved
To enable transmission (Bit 0) while leaving other settings untouched, one would perform a bitwise OR with 00000001. To check if an error occurred (Bit 2), one would perform a bitwise AND with 00000100.
Error Checking and Validation
In robust drone systems, data integrity is paramount. Bitwise operations, including AND, are sometimes part of simple checksum or error detection mechanisms within data packets or communication streams. By performing a bitwise operation on a block of data, a specific pattern or value can be expected. If the computed value differs from the expected one, an error can be flagged.
Performance and Efficiency Gains
The primary driver for using bitwise operations in embedded systems like drones is performance and efficiency.
Speed
Bitwise operations are typically implemented directly in hardware by the processor’s Arithmetic Logic Unit (ALU). This means they are executed extremely quickly, often in a single clock cycle. Compared to equivalent operations performed using standard arithmetic or conditional branching, bitwise operations are orders of magnitude faster. In time-critical applications like real-time flight control, this speed advantage is crucial.
Memory Footprint
Bitwise operations allow for compact data representation. Instead of using separate variables for multiple boolean flags, a single integer can store dozens of flags, significantly reducing the memory footprint of the software. This is especially important for resource-constrained embedded systems common in drones.
Reduced Instruction Count
A sequence of bitwise operations can often achieve the same result as a longer sequence of standard arithmetic or logical instructions. Fewer instructions mean faster execution and less code to manage.
Conclusion
The bitwise AND operation, though seemingly simple, is a cornerstone of efficient data processing in modern drone technology. From the granular control of sensor inputs and system states to the intricate management of hardware registers and communication protocols, bitwise AND empowers engineers to build sophisticated, responsive, and reliable UAV systems. Its ability to perform selective masking, filtering, and flag management with exceptional speed and minimal resource consumption makes it an indispensable tool in the digital toolkit of any drone developer or advanced hobbyist aiming to understand the intricate workings of their aerial machines. As drones continue to evolve with increased autonomy and complexity, the fundamental power of bitwise AND will remain a silent, yet critical, enabler of their advanced capabilities.