The Unseen Conductor: Orchestrating Your Drone’s Digital Life
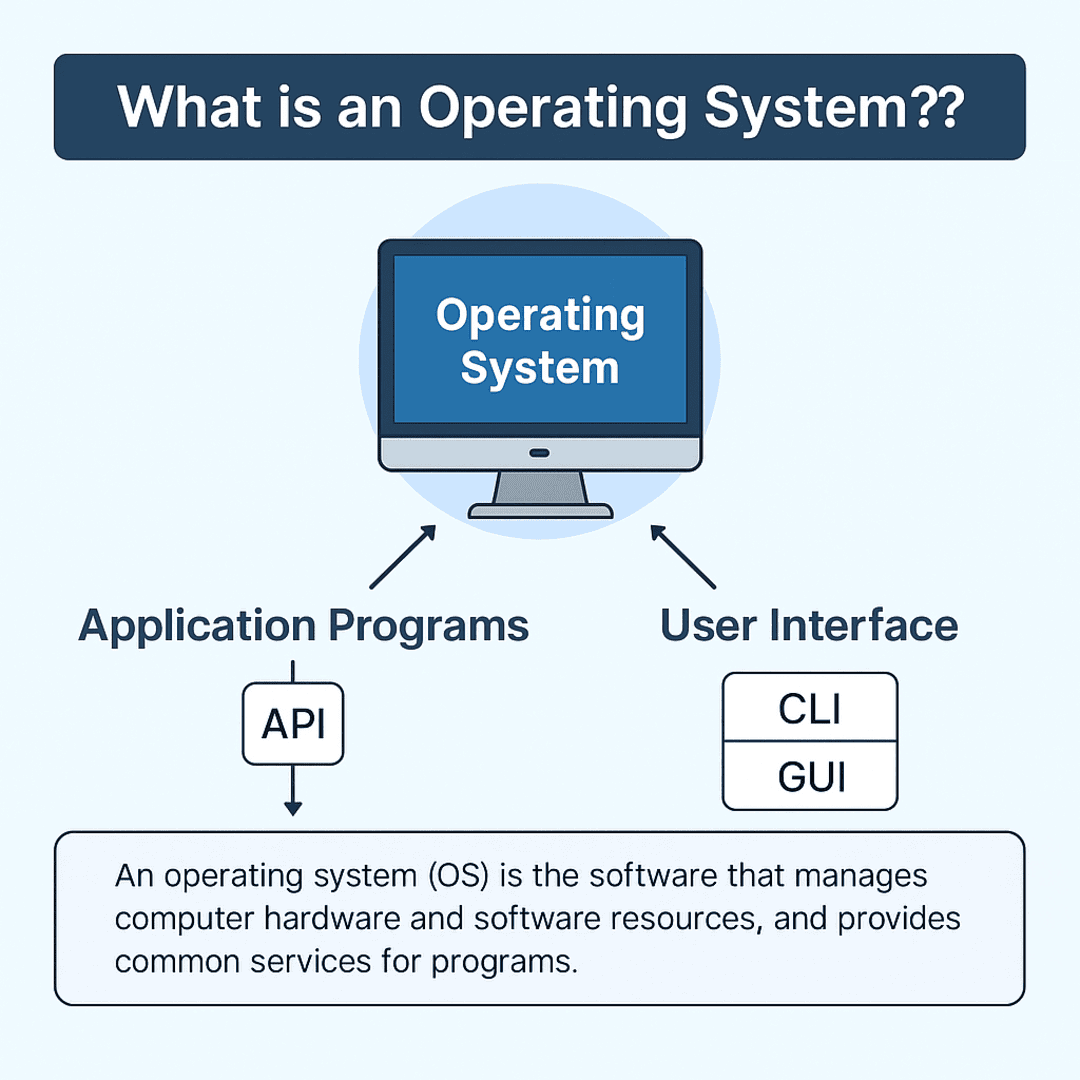
At the heart of every modern drone, from the nimble racing quadcopter to the sophisticated aerial mapping platform, lies an unsung hero: the computer operating system (OS). Far from being a mere software layer, the OS is the fundamental engine that breathes life into the drone’s complex hardware, managing its every digital breath and action. It’s the unseen conductor, orchestrating an intricate symphony of data processing, communication, and control that allows your drone to navigate the skies, capture stunning aerial imagery, and perform its designated tasks with precision. Without a robust and efficient OS, the advanced sensors, powerful processors, and intricate flight control systems of a drone would remain dormant, unable to translate commands into physical movement or environmental awareness. This article delves into the crucial role of the computer OS in the context of drone technology, exploring its core functions, the types of OS prevalent in the drone industry, and why its selection and optimization are paramount for performance, reliability, and innovation.
The Core Functions of a Drone’s Operating System
The OS on a drone performs a multitude of critical functions, forming the bedrock upon which all other drone capabilities are built. These functions can be broadly categorized into several key areas:
Hardware Management and Resource Allocation
At its most fundamental level, the OS acts as an intermediary between the drone’s hardware components and the software applications that control them. This involves a constant stream of communication and management:
- Processor Management: The OS determines how tasks are prioritized and executed by the drone’s central processing unit (CPU) and graphics processing unit (GPU). This ensures that time-sensitive flight control calculations receive immediate attention, while less critical background processes are handled efficiently without impacting flight stability.
- Memory Management: Drones often operate with limited onboard memory. The OS meticulously manages this resource, allocating memory to running processes, ensuring data is stored and retrieved quickly, and preventing memory leaks that could lead to system instability or crashes.
- Device Management: The OS interacts with and controls a vast array of peripherals, including sensors (IMUs, GPS, barometers, lidar, cameras), actuators (motors, servos), communication modules (Wi-Fi, Bluetooth, radio control receivers), and storage devices. It provides standardized interfaces for software to access these devices without needing to understand their underlying hardware specifics.
- Power Management: Efficient power consumption is vital for extending flight times. The OS plays a significant role in managing power distribution to various components, intelligently shutting down or reducing power to non-essential systems when not in use, and optimizing battery usage.
Process Management and Task Scheduling
Drones are inherently multi-tasking machines. The OS is responsible for managing these concurrent processes:
- Process Creation and Termination: The OS allows new tasks (e.g., initiating a flight plan, starting video recording) to be created and managed, and it gracefully terminates processes when they are no longer needed.
- Task Scheduling: This is perhaps one of the most critical functions for a drone OS. It involves deciding which process gets to use the CPU and for how long. In a drone, real-time scheduling is paramount. Flight control computations, sensor data acquisition, and obstacle avoidance algorithms must be executed within strict time constraints to maintain stability and safety. The OS employs sophisticated scheduling algorithms to ensure these critical tasks are always prioritized.
- Inter-Process Communication (IPC): Different software modules on a drone often need to share information. The OS provides mechanisms for these processes to communicate and exchange data safely and efficiently, allowing, for instance, the navigation system to receive altitude data from the barometer or the flight controller to relay current position to the mission planning app.
Input/Output (I/O) Operations and Data Handling
The continuous flow of data is the lifeblood of a drone’s operation:
- Sensor Data Acquisition: The OS facilitates the seamless collection of data from all onboard sensors. This includes inertial measurement units (IMUs) for orientation, GPS for location, cameras for visual input, and various other environmental sensors.
- Command Interpretation and Execution: The OS receives commands from the remote controller or autonomous mission planner and translates them into instructions for the flight controller and other drone systems. This could range from simple stick movements to complex waypoint navigation commands.
- Data Storage and Retrieval: When recording video, capturing images, or logging flight data, the OS manages the process of writing this information to onboard storage devices like SD cards. It also handles the retrieval of this data for later analysis or playback.
- Communication Protocols: The OS manages the various communication channels the drone uses, from low-level radio frequency (RF) protocols for remote control to higher-level network protocols for Wi-Fi or cellular communication, enabling data upload, firmware updates, and live streaming.
User Interface and Application Support
While a drone’s primary “user” is often the flight controller or an autonomous system, the OS also provides the foundation for user interaction:
- Ground Control Station (GCS) Communication: The OS enables the drone to communicate with a GCS application running on a tablet or computer. This allows pilots to monitor telemetry, set waypoints, view camera feeds, and control the drone.
- Application Execution Environment: For drones running advanced features like AI-powered object recognition or complex mission planning, the OS provides the environment for these applications to run, manage their resources, and interact with other drone systems.
Navigating the Landscape of Drone Operating Systems
The demanding requirements of drone operation—real-time responsiveness, high reliability, and efficient resource utilization—have led to the development and adoption of specialized operating systems. While general-purpose OS like Windows or macOS are not suitable for the core flight control functions of a drone, certain embedded OS and real-time operating systems (RTOS) have become the industry standard.
Real-Time Operating Systems (RTOS)
RTOS are designed to guarantee that a specific computation will be completed within a defined time constraint. This deterministic behavior is crucial for flight control:
- Predictability and Determinism: Unlike general-purpose OS that can experience unpredictable delays (e.g., during background tasks or memory swaps), RTOS offer a high degree of predictability. This means that critical commands, such as adjusting motor speed to maintain stability, are executed with guaranteed timing.
- Task Prioritization and Preemption: RTOS excel at managing tasks with varying levels of urgency. They allow high-priority tasks (like flight stabilization) to preempt lower-priority tasks (like logging sensor data) immediately, ensuring that critical functions are never delayed.
- Examples in Drones: Popular RTOS used in the drone industry include FreeRTOS, Zephyr, and VxWorks. These are often found running on the flight controller’s microcontroller, handling the low-level sensor fusion, PID control loops, and motor commands. Their lightweight nature and minimal overhead make them ideal for resource-constrained embedded systems.
Embedded Linux Distributions
For more advanced drones that require sophisticated processing for tasks like computer vision, AI, mapping, and complex mission planning, embedded Linux distributions are often employed. These run on more powerful processors, typically ARM-based System-on-Chips (SoCs).
- Flexibility and Richness: Embedded Linux offers a vast ecosystem of software, libraries, and development tools. This makes it ideal for implementing complex functionalities and integrating advanced algorithms.
- Networking and Connectivity: Linux’s robust networking stack makes it well-suited for drones requiring advanced communication capabilities, such as Wi-Fi, cellular, or integration with cloud services.
- Hardware Abstraction: The Linux kernel provides sophisticated hardware abstraction layers, simplifying the development of software that can run across a range of hardware configurations.
- Use Cases: Drones used for professional aerial surveying, industrial inspection, and advanced cinematography often leverage embedded Linux on their main flight computer or companion computers. Distributions like Yocto Project, Ubuntu Core, or customized versions of Raspbian are common.
Specialized and Proprietary Operating Systems
Some drone manufacturers develop their own proprietary operating systems or heavily customize existing ones to meet their specific design goals.
- Optimized Performance: These systems can be highly optimized for a particular hardware architecture and set of functionalities, potentially offering superior performance or efficiency for specific tasks.
- Integrated Ecosystems: Proprietary OS can facilitate tighter integration between hardware, firmware, and the manufacturer’s software suite, offering a more seamless user experience.
- Security: Custom OS can be designed with specific security features tailored to the drone’s intended application, potentially offering enhanced protection against cyber threats.
The OS as a Gateway to Advanced Drone Capabilities
The operating system is not just about basic functionality; it’s the enabler of innovation and advanced features that define the capabilities of modern drones.
Autonomous Flight and AI Integration
- Path Planning and Navigation: The OS manages the execution of algorithms that allow drones to plan and follow complex flight paths, avoiding obstacles and adapting to dynamic environments. This relies heavily on the OS’s ability to process sensor data in real-time and schedule navigation computations efficiently.
- Machine Learning and Computer Vision: For drones equipped with AI capabilities, such as object recognition, tracking, or autonomous landing, the OS provides the necessary environment to run these computationally intensive machine learning models. It ensures that the required processing power is allocated and that sensor data is fed to the AI algorithms without delay.
- Simultaneous Localization and Mapping (SLAM): Technologies like SLAM, which allow drones to build a map of their environment while simultaneously tracking their own position within that map, are heavily dependent on the OS’s ability to manage high-throughput sensor data streams and perform complex calculations in real-time.
Mission Planning and Execution
- Waypoint Navigation: The OS allows for the precise execution of pre-programmed flight plans, enabling drones to fly predetermined routes for aerial photography, surveying, or delivery missions.
- Intelligent Flight Modes: Features like “Follow Me” mode, “Orbit,” or “Point of Interest” are complex software applications that run on top of the OS. The OS ensures these applications can access necessary sensor data (like GPS and visual tracking) and command the flight controller accordingly.
- Data Logging and Telemetry: The OS manages the collection, formatting, and storage of vast amounts of telemetry data (altitude, speed, battery status, GPS coordinates) and sensor readings, which are crucial for post-mission analysis and understanding flight performance.
Connectivity and Communication
- Remote Control Integration: The OS handles the decoding of radio control signals, translating pilot inputs into actionable commands for the drone.
- Networked Operations: For drones operating in complex environments or as part of a larger swarm, the OS manages network communication protocols, enabling data sharing, coordination, and remote monitoring.
- Over-the-Air (OTA) Updates: The OS facilitates secure and reliable firmware updates, allowing manufacturers to improve drone performance, add new features, and patch security vulnerabilities remotely.
Conclusion: The Indispensable Foundation
The computer operating system is the silent, powerful architect of a drone’s capabilities. It is the foundational layer that transforms raw hardware into an intelligent, responsive aerial platform. From managing the intricate dance of flight control to enabling cutting-edge AI functionalities and ensuring reliable communication, the OS is indispensable. As drone technology continues to evolve, pushing the boundaries of autonomy, intelligence, and application, the role of the operating system will only become more critical. A well-designed, efficient, and reliable OS is not just a component; it is the very essence of a drone’s operational prowess, unlocking its potential to explore, create, and innovate in the skies.