The term “kernel” is fundamental to understanding how any computer system, including those powering advanced drones, operates. It is the core component of an operating system, acting as the bridge between the hardware and the software applications. In the context of drone technology, a deep appreciation for the kernel’s role illuminates the sophisticated processes that enable flight control, sensor management, communication, and even autonomous capabilities.
The Kernel’s Foundational Role in Drone Operation
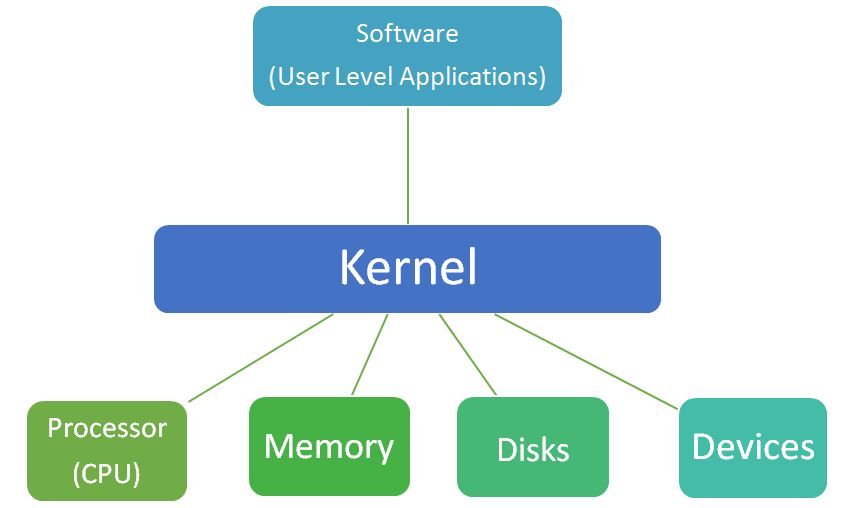
At its most basic, the kernel is a program that manages the system’s resources. For a drone, these resources are critically important and diverse. They include the central processing unit (CPU) time allocated to various tasks, the drone’s memory, and access to its myriad hardware components.

Resource Management: The Brain of the Drone’s System
Every action a drone takes, from hovering to executing a complex aerial maneuver, requires the allocation and management of these resources. The kernel ensures that multiple processes, such as sensor data acquisition, flight controller calculations, communication protocols, and user interface updates, can run concurrently without interfering with each other.
Process Scheduling
When a drone is actively flying, its flight controller is constantly processing data from accelerometers, gyroscopes, GPS, and barometers. Simultaneously, it might be transmitting video back to a ground station or receiving commands. The kernel’s process scheduler is responsible for deciding which of these tasks gets to use the CPU at any given moment and for how long. This scheduling must be precise and efficient to maintain stability and responsiveness, especially in dynamic flight conditions. Real-time operating systems (RTOS), often employed in embedded systems like drones, utilize sophisticated scheduling algorithms to guarantee that critical tasks are executed within strict deadlines, preventing flight instability or loss of control.
Memory Management
Drones, especially those with advanced imaging or mapping capabilities, can consume significant amounts of memory. The kernel manages this memory, allocating it to different processes and ensuring that one program doesn’t overwrite another’s data. This is crucial for tasks like buffering camera frames, storing navigation data, or running AI algorithms for object recognition. Efficient memory management prevents crashes and ensures that the drone’s onboard computer can handle the demands of its operational tasks.
Hardware Abstraction: Communicating with the Drone’s Components
The kernel provides a layer of abstraction between the software applications and the drone’s physical hardware. This means that software developers don’t need to write specific code for every single sensor or actuator. Instead, they interact with the kernel through a set of standardized interfaces (often called system calls). The kernel then translates these requests into commands that the specific hardware can understand.
Device Drivers
Each hardware component on a drone – the motors, the GPS module, the camera gimbal, the Wi-Fi transmitter, the ultrasonic sensors – has a corresponding device driver. These drivers are essentially small programs that tell the kernel how to communicate with and control that specific piece of hardware. When the flight control software needs to adjust motor speed, it makes a request to the kernel. The kernel, in turn, uses the motor’s device driver to send the appropriate signals to the electronic speed controllers (ESCs). This abstraction is vital for simplifying software development and allowing for easy upgrades or replacements of hardware components without rewriting the entire operating system.
Inter-Process Communication (IPC)
In a complex system like a drone, different software processes need to share information. For instance, the GPS module might need to send location data to the navigation system, or the camera gimbal controller might need to receive commands from the user interface. The kernel facilitates this communication through IPC mechanisms. These allow separate processes to exchange data, synchronize their actions, and signal events to one another. This is the backbone of how different parts of the drone’s sophisticated software ecosystem work together seamlessly.
The Kernel in Advanced Drone Functionality
Beyond basic flight control, the kernel plays a pivotal role in enabling the advanced features that define modern drones. This includes everything from sophisticated navigation and obstacle avoidance to the integration of artificial intelligence.
Enabling Real-Time Performance
The inherent nature of drone flight demands real-time responsiveness. A delay of even a few milliseconds in processing sensor data or sending motor commands can lead to instability or a crash. Real-time kernels are specifically designed to guarantee that operations are completed within deterministic time frames.
Determinism and Latency
In a traditional desktop operating system, tasks can experience variable delays (latency). For a drone, this is unacceptable. A real-time kernel prioritizes time-critical tasks, ensuring that they are executed with minimal and predictable latency. This determinism is achieved through priority-based scheduling, preemption (allowing high-priority tasks to interrupt lower-priority ones), and efficient interrupt handling. For example, when an obstacle is detected by a sensor, the kernel must ensure that the obstacle avoidance routine is executed immediately, overriding less critical processes.
Supporting Complex Sensor Fusion and Navigation
Modern drones rely on a multitude of sensors to understand their environment and navigate accurately. The kernel’s role in managing these sensors and facilitating the fusion of their data is paramount.
Sensor Data Acquisition and Processing
The kernel orchestrates the acquisition of data from various sensors. It ensures that data from the GPS, IMU (Inertial Measurement Unit – comprising accelerometers and gyroscopes), barometers, magnetometers, and vision sensors is collected at the correct rates and made available to the relevant software modules. This raw data is then processed by algorithms that might reside in user-space applications or as kernel modules themselves.
Navigation and Localization
The kernel provides the foundational services that allow navigation systems to operate. It ensures the flight controller has access to the fused sensor data, enabling it to calculate the drone’s position, velocity, and orientation. This is crucial for maintaining a stable hover, following pre-programmed flight paths, and executing autonomous missions. The kernel’s efficiency directly impacts the accuracy and reliability of these critical navigation functions.
The Kernel’s Role in Autonomous Systems and AI
As drones become increasingly sophisticated, integrating AI and autonomous capabilities, the kernel’s role evolves to support these complex computations and decision-making processes.
Facilitating AI and Machine Learning
For drones performing tasks like object detection, tracking, or advanced mapping, significant computational power is required for AI algorithms. The kernel manages the allocation of CPU and GPU resources to these demanding processes.
Parallel Processing and Offloading
Modern kernels can manage parallel processing tasks, leveraging multi-core CPUs and specialized hardware like GPUs (Graphics Processing Units) or NPUs (Neural Processing Units). This allows AI algorithms to execute much faster. The kernel also handles the offloading of computations, sending tasks to the most appropriate processing unit and managing the return of results.
Integration with AI Frameworks
The kernel provides the underlying platform that allows AI frameworks (like TensorFlow Lite or PyTorch Mobile) to run on the drone’s embedded system. It manages the memory, process scheduling, and hardware access needed for these frameworks to load models, process input data (e.g., camera feeds), and generate outputs (e.g., object bounding boxes or navigation commands).
Enabling Advanced Communication and Connectivity
Reliable communication is a cornerstone of drone operation, whether for control, telemetry, or data transmission. The kernel manages the complex networking stacks required for these functions.
Network Protocols
The kernel implements and manages the network protocols that allow the drone to communicate with its controller, ground stations, or other networked devices. This includes protocols like Wi-Fi, Bluetooth, cellular (for LTE-enabled drones), and specialized radio communication protocols. It handles packet routing, error checking, and data serialization/deserialization, ensuring that data is transmitted and received reliably and efficiently.

Real-time Data Streaming
For applications like FPV (First-Person View) or live video streaming for aerial filmmaking, the kernel’s efficient handling of data streams is essential. It ensures that video frames are captured, encoded, and transmitted with minimal latency, providing a smooth and responsive experience for the pilot or viewer.
In essence, the computer kernel is the invisible yet indispensable heart of any drone’s operating system. It is the foundation upon which all other functionalities are built, from the simplest act of taking off to the most complex autonomous mission. Understanding the kernel’s intricate workings provides a deeper appreciation for the technological marvels that these aerial machines represent.