The intricate dance of a drone across the sky, guided by a pilot’s precise movements and commands, hinges on a myriad of interconnected technologies. Among these, an often-overlooked yet fundamentally critical process, especially in the realm of drone accessories like remote controllers, is “debouncing.” While seemingly a technical minutia, debouncing is the unsung hero that translates a human’s single, deliberate button press into an equally singular and reliable digital command, ensuring seamless and safe drone operation.
The Unseen Challenge of Physical Inputs in Drone Controllers
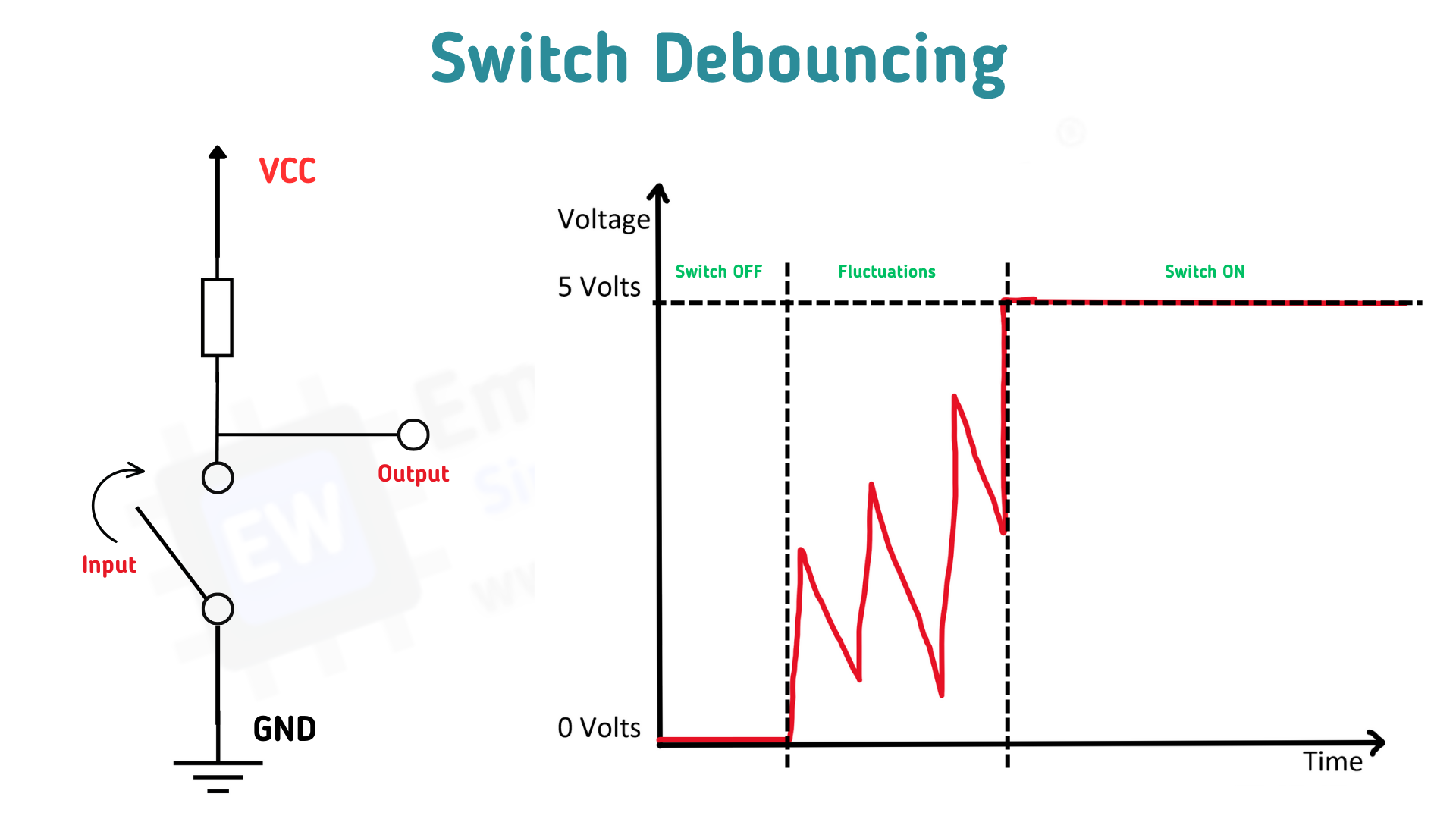
At first glance, pressing a button on a drone’s remote controller appears to be a straightforward action: push, connect, execute. However, beneath the surface of this simple interaction lies a complex physical phenomenon known as “contact bounce.” When two metal contacts within a mechanical switch or button meet, they rarely make perfect, immediate, and stable contact. Instead, due to their inherent elasticity and kinetic energy, they tend to make and break contact rapidly several times before finally settling into a stable “on” or “off” state.
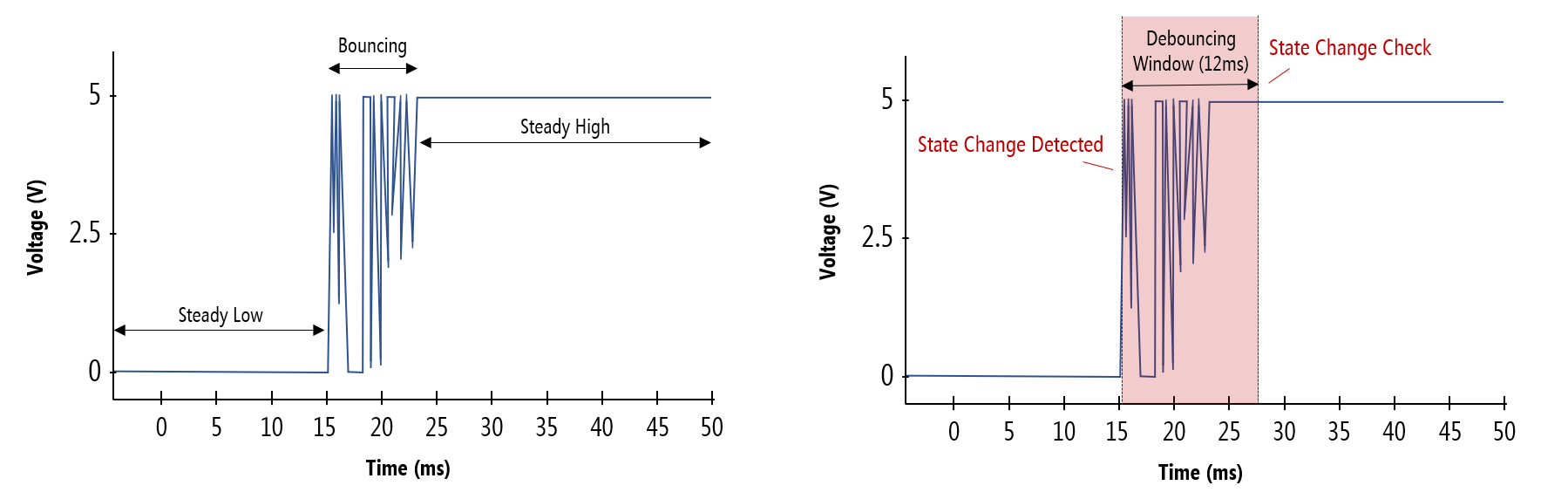
Imagine a tennis ball bouncing off a hard surface; it doesn’t just hit and stop, but bounces a few times before coming to rest. Similarly, the metallic contacts within a switch oscillate, creating a series of rapid, transient electrical pulses instead of a clean, single transition. For the incredibly fast microcontrollers and digital circuits within a drone controller, these rapid fluctuations are interpreted as multiple distinct signals. A single physical press of a button, intended to trigger one action, might register as several “on/off” events in quick succession.
The implications of this contact bounce for drone accessories, particularly the primary remote controller, are profound and potentially hazardous:
- Accidental Multiple Commands: A single press of a “take-off” button could be misread as two or three presses, potentially leading to an immediate, unintended re-landing or other erratic behavior.
- Unintended Mode Changes: Flipping a switch to select “Sport Mode” might momentarily register an intermediate state or even cycle through several modes before settling, confusing the drone’s flight controller and the pilot.
- Erratic Navigation and Control: In menu systems or calibration routines on the controller’s display, bouncing inputs could cause menu selections to skip, register multiple entries, or fail to respond predictably, frustrating the user and hindering crucial pre-flight setups.
- Safety Compromise: For critical functions like an emergency stop or Return-to-Home, misinterpreting a single press could lead to delayed or improper execution of safety protocols, jeopardizing the drone, its surroundings, or even human safety.
In a system where precision, reliability, and immediate response are paramount, such as controlling an aerial vehicle, mitigating contact bounce is not merely a convenience but an absolute necessity for predictable behavior and a secure flight experience.
How Debouncing Works: Strategies for Signal Purity
Debouncing is the electronic and programmatic art of filtering out these spurious, momentary electrical signals caused by mechanical switch bounce, ensuring that the system interprets a single physical actuation as only one logical input. Various techniques are employed, broadly categorized into hardware-based and software-based solutions.
Hardware Debouncing
These methods involve adding physical components to the circuit to clean the signal before it reaches the microcontroller.
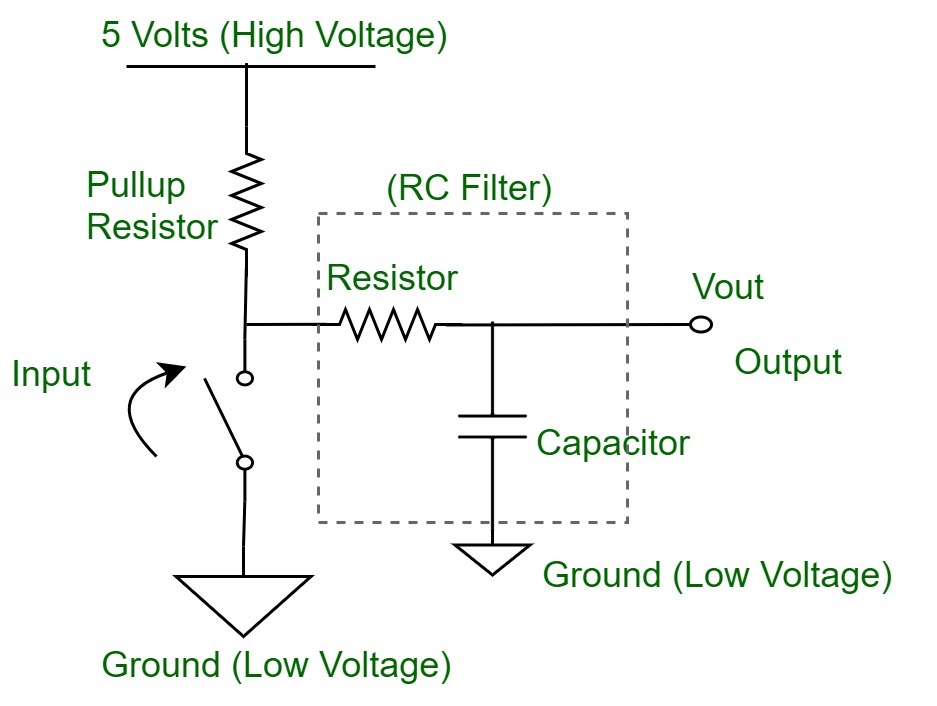
- RC Filters (Resistor-Capacitor Filters): This is one of the simplest and most common hardware debouncing techniques. A resistor and a capacitor are placed in series or parallel with the switch. When the switch bounces, the capacitor charges or discharges through the resistor. The time it takes for the capacitor to charge or discharge to a stable voltage level (the “RC time constant”) is designed to be longer than the duration of the contact bounce. This effectively smooths out the rapid voltage fluctuations, presenting a stable high or low signal to the microcontroller.
- Schmitt Triggers: A Schmitt trigger is a special type of comparator circuit that incorporates hysteresis. This means it has two different threshold voltages for switching between its “on” and “off” states. For example, it might switch on when the input voltage rises above 3V and switch off only when it falls below 2V. This “dead zone” between the thresholds prevents the output from rapidly oscillating when the input signal hovers around a single threshold due to noise or bouncing.
- Flip-Flops (SR Latches): For more robust debouncing, particularly in situations where both “make” and “break” bouncing need to be addressed, logic gates like an SR (Set-Reset) latch can be used. When the switch is pressed, it sets the latch, and subsequent bounces are ignored until the switch is fully released, which then resets the latch. This ensures that only the initial stable contact and final stable release are registered.
Hardware debouncing offers the advantage of handling the issue independently of the microcontroller’s processing, potentially offloading computational burden. However, it adds components, increasing complexity, board space, and manufacturing cost.
Software Debouncing
This approach leverages the microcontroller’s processing power to filter switch inputs programmatically, without additional hardware components.
- Delay/Polling Method: This is arguably the most prevalent software debouncing technique. When the microcontroller detects an initial change in the switch’s state (e.g., a button press), it doesn’t immediately register it as a valid input. Instead, it waits for a short, predefined period (typically 20-50 milliseconds, which is longer than most bounce durations) before checking the switch’s state again. If the state is still consistently changed after this delay, it’s considered a stable, valid input. If the state has reverted during the delay (indicating a bounce), the system ignores it and continues monitoring.
- State Machine Debouncing: A more sophisticated software approach involves implementing a state machine. The microcontroller tracks the button’s input through several states over time (e.g., “Open,” “Bouncing-Low,” “Closed,” “Bouncing-High,” “Released”). A stable “press” is only registered when the button has remained in the “Closed” state for a defined minimum duration, and similarly for a stable “release.” This method offers excellent flexibility and robustness against various bounce patterns.
- Interrupt-driven vs. Polling: Software debouncing can be triggered either by polling (the microcontroller periodically checks the state of all buttons) or by interrupts (the button’s state change triggers a special routine). While polling is simpler, interrupt-driven debouncing can be more responsive, as the system doesn’t need to wait for the next polling cycle to initiate the debouncing routine.
Software debouncing is highly flexible, cost-effective (as it uses existing processing resources), and easily adjustable through firmware updates. Its main drawbacks are a slight consumption of CPU cycles and the potential for introducing a very small delay in input recognition, though for human-speed inputs, this delay is negligible and far preferable to unreliable inputs. Modern drone controllers often employ a combination of subtle hardware filtering and robust software debouncing for optimal performance.
The Imperative of Debouncing in Drone Controller Design
For drone accessories, particularly the primary remote controller, implementing effective debouncing is not merely a design choice; it is an imperative that directly influences safety, reliability, and user experience.
- Precision and Reliability: A drone controller is the pilot’s direct tactile and auditory link to a sophisticated aerial machine. Every input must be interpreted with absolute precision. Debouncing guarantees that when a pilot intends to perform a single action—be it adjusting throttle, initiating a camera recording, or toggling GPS hold—the drone’s flight controller receives and executes that single, intended command, without any ambiguity or spurious inputs. This reliability is foundational for predictable flight behavior.
- Enhanced Safety Protocols: Many drones feature critical safety mechanisms, such as an emergency motor kill switch, a dedicated Return-to-Home button, or intelligent obstacle avoidance toggles. In moments of urgency, these functions must activate precisely once and without fail. Debouncing ensures that these vital commands are executed cleanly, preventing unintended activations or, conversely, the failure to register a single, critical press during an emergency.
- Superior User Experience (UX): A poorly debounced controller feels “buggy” and unresponsive. Imagine pressing a button to navigate a menu, only to find it skips entries or registers multiple selections. Such frustrations detract significantly from the perceived quality and functionality of an expensive drone system. Well-implemented debouncing makes the controller feel responsive, intuitive, and reliable, fostering pilot confidence and an enjoyable flying experience. This is a hallmark of premium drone brands.
- Seamless Mode Switching and Fine Control: Modern drones offer a variety of flight modes—from beginner-friendly stabilized flight to aggressive sport modes or cinematic slow-motion profiles. Pilots frequently switch between these modes using physical toggles or buttons. Debouncing ensures that these mode transitions are crisp and singular, preventing the drone from momentarily entering an incorrect mode or experiencing unpredictable behavior during the switch, which could be disorienting or dangerous. Fine-tuning controls, accessing on-screen displays, or activating payload drops all depend on accurate, bounce-free inputs.
Beyond Buttons: Expanding Debouncing’s Role in Drone Accessories
While the discussion of debouncing most commonly centers around the physical buttons and switches on a drone’s primary remote controller, its principles extend to a broader array of drone accessories and their interfaces:
- Smart Batteries: Many advanced drone batteries feature physical buttons. These buttons might be used to check charge status via LED indicators or initiate a power-cycling sequence. Just like controller buttons, these require debouncing to ensure accurate status reports and reliable power management without false activations.
- Gimbal and Camera Controls: Integrated camera gimbals or separate accessory camera controllers often include physical buttons for functions such as recording video, taking photos, zooming in/out, or adjusting exposure settings. These inputs demand debouncing to prevent accidental multiple shots or erratic camera behavior, which could ruin crucial footage.
- Ground Stations and Specialized Peripherals: While many modern ground station controls are touch-based via mobile apps, some professional or custom drone setups may utilize physical buttons, joysticks, or switches for specific mission parameters, payload deployment, or emergency overrides. Any such mechanical interface would benefit from debouncing to ensure precise command execution.
- Third-Party Add-ons: The rapidly expanding ecosystem of drone accessories includes various third-party modules, from advanced lighting systems to payload drop mechanisms. If these accessories incorporate physical buttons or switches for their operation, integrating debouncing is a fundamental requirement for reliable and predictable performance.
In essence, debouncing is a cornerstone of robust electronic design, essential for any interaction where a human’s physical manipulation of a switch must be accurately and singularly translated into a digital command. For the complex, precision-driven world of drone accessories, it forms an invisible yet indispensable layer of reliability, ensuring that every button press counts and every flight command is executed with unwavering accuracy.