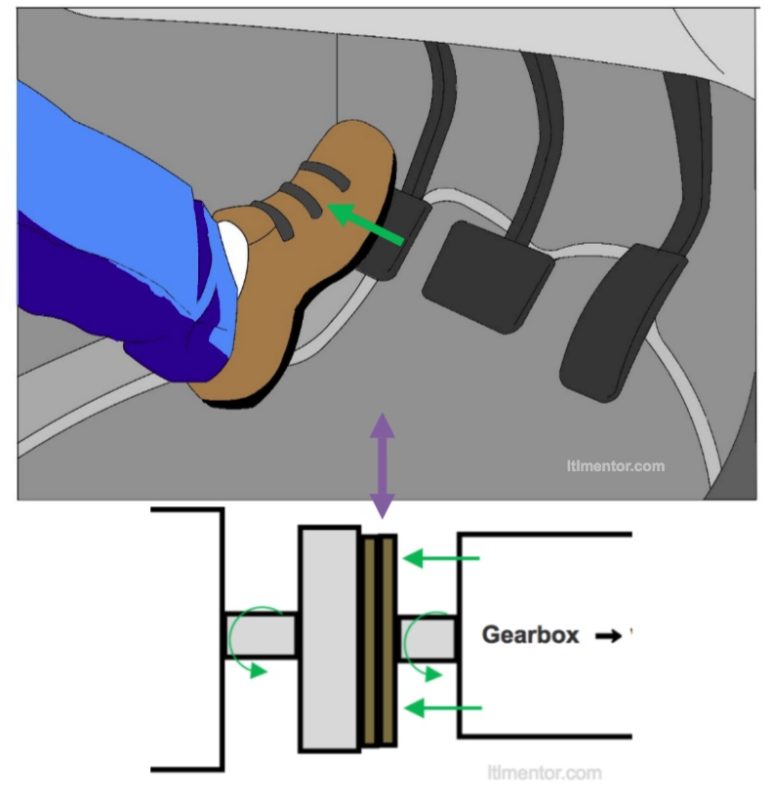
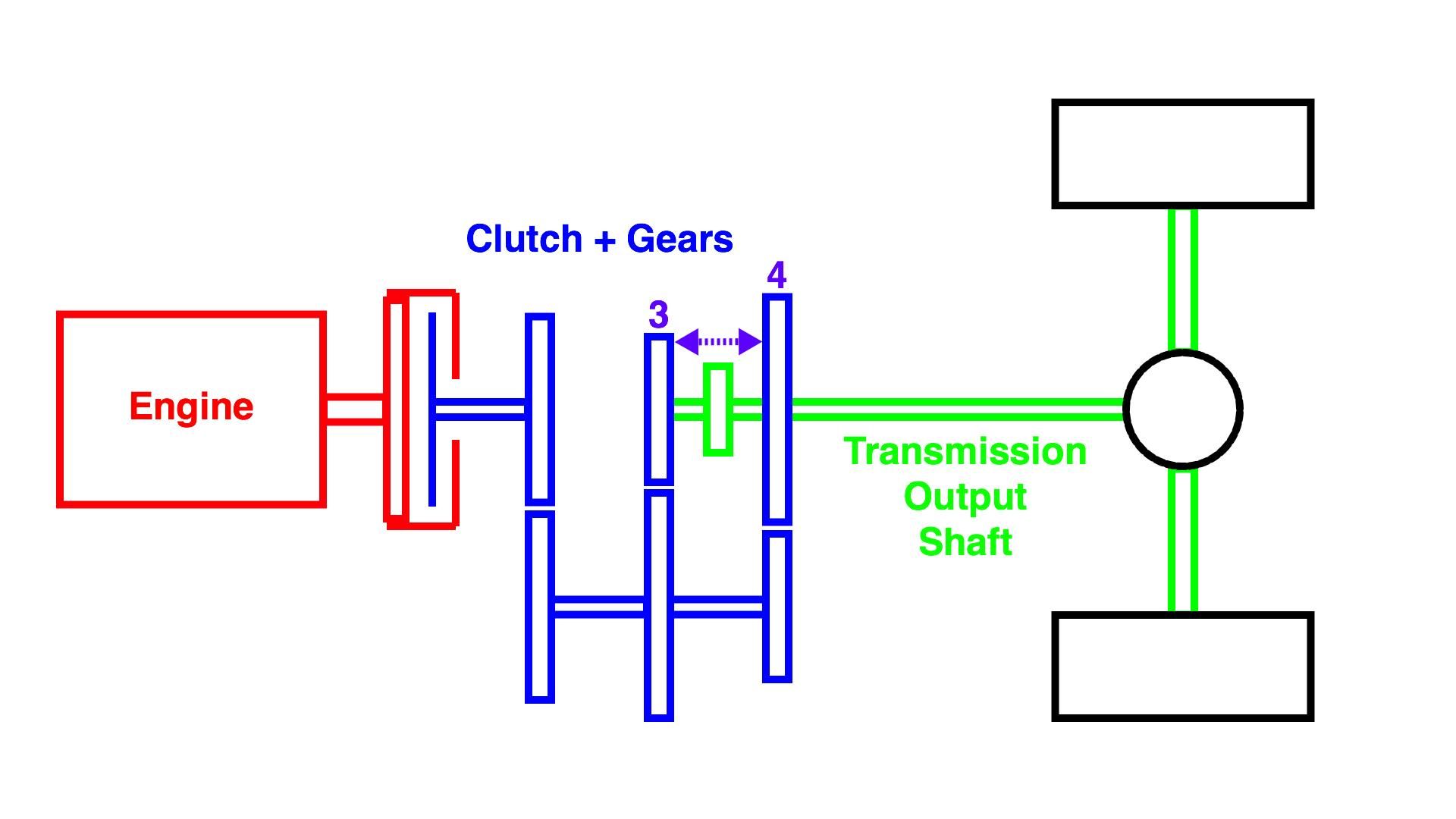
The term “double clutch” traditionally evokes images of a manual transmission, a skilled driver, and the rhythmic interplay of gear shifts, engine revs, and clutch pedals. In its original automotive context, it describes a technique used to smoothly shift gears, particularly downshifting in older vehicles or heavy trucks without synchronized transmissions. It involves disengaging the clutch, shifting to neutral, engaging the clutch to match engine RPMs with the transmission’s input shaft, disengaging again, and finally shifting into the desired gear. This multi-step process ensures a seamless transfer of power and minimizes wear.
However, in the advanced world of drone technology and aerial systems, the literal mechanical clutch of a car gearbox finds no direct counterpart. Drones predominantly utilize electric motors with Electronic Speed Controllers (ESCs) that offer precise, continuous power regulation, negating the need for mechanical gear changes in the traditional sense. Yet, the essence of “double clutching”—a deliberate, multi-stage process of disengagement, synchronization, and re-engagement to achieve a smooth and efficient transition between distinct operational states or power delivery modes—is remarkably pertinent. In the realm of flight technology, this concept resurfaces as a sophisticated control strategy, particularly vital in complex aerial platforms that transition between radically different flight regimes.
![]()
Beyond the Gearbox: Redefining “Double Clutch” in Modern Flight Technology
While drones lack a physical clutch, the principles behind the “double clutch” technique—precision, timing, and multi-stage control for smooth transitions—are directly applicable to the intricate dance of flight. Modern flight technology, especially in advanced Unmanned Aerial Vehicles (UAVs), frequently encounters scenarios where a platform must fluidly move from one mode of operation, propulsion, or control paradigm to another. These transitions are not instantaneous ‘on/off’ switches; they require a carefully orchestrated sequence of actions to maintain stability, efficiency, and safety. This is where the metaphorical “double clutch” comes into play, signifying a complex algorithmic process rather than a mechanical linkage.
The “disengagement” in this context refers to the gradual reduction or redirection of control authority or power from one primary system. The “neutral” phase is a transitional state where the system prepares for the next phase, often involving an intermediate control strategy or a period of careful balancing. The “synchronization” is crucial, akin to rev-matching in a car, where the drone’s flight controller adjusts critical parameters—such as airspeed, attitude, or propulsion output—to align them optimally for the impending shift. Finally, the “re-engagement” signifies the full activation and commitment to the new operational mode. This intricate sequence, managed by highly sophisticated flight control software, sensors, and actuators, is the technological analogue of a double clutch, ensuring seamless operation across diverse flight envelopes.
The Analogy in VTOL and Hybrid Drone Transitions
One of the most compelling applications of this “double clutch” concept in flight technology is found in Vertical Take-off and Landing (VTOL) aircraft and hybrid drones. These innovative platforms combine the agility of multi-rotor systems for vertical flight with the efficiency of fixed-wing designs for forward cruise. The transition between these two fundamentally different flight modes is a quintessential example of multi-stage control that mirrors the “double clutch” philosophy.
Managing Propulsion Systems
In a hybrid VTOL drone, the initial phase often involves multi-rotor propulsion for vertical ascent and hover. As the drone prepares for forward flight, the “first clutch” action initiates. This involves the flight controller gradually reducing the thrust from the vertical lift rotors while simultaneously initiating or increasing thrust from the horizontal propulsion system (e.g., a pusher propeller or tilting motors). It’s a careful disengagement from one primary power source while initiating another, ensuring that at no point is the aircraft without sufficient lift or thrust to maintain controlled flight.
Synchronizing Aerodynamic Forces
The intermediate or “neutral” state in this transition is critical. Here, the drone is neither fully in vertical flight nor fully in horizontal flight. The flight controller must meticulously manage the interplay between the decreasing vertical thrust and the increasing aerodynamic lift generated by the wings as forward speed builds. This is the “synchronization” phase. Like rev-matching in a car, the drone’s control system actively monitors and adjusts airspeed, pitch, and roll to ensure that the wing is generating sufficient lift to support the aircraft’s weight before the vertical lift components are fully disengaged. Airspeed sensors, gyroscopes, accelerometers, and advanced predictive algorithms work in concert to achieve this delicate balance, ensuring that the drone smoothly gains aerodynamic lift while maintaining a stable attitude.
Engaging the New Flight Regime
Once the critical airspeed is achieved, and the wings are generating sufficient lift, the “second clutch” action occurs. This involves the full disengagement of the vertical lift motors, allowing them to spin down or tilt into an aerodynamic position. Simultaneously, the flight control system fully commits to the fixed-wing flight mode, transferring primary control authority to the aerodynamic surfaces (ailerons, elevator, rudder) and the horizontal propulsion system. The goal is a seamless, imperceptible transition for the onboard systems and, ideally, for any payload or occupants. This precise sequencing minimizes instability, reduces power consumption during the transition, and ensures the drone operates at peak efficiency in its new flight mode.
Advanced Control Algorithms and System Integration
The ability to execute such complex, multi-stage transitions—the flight technology equivalent of a “double clutch”—is a testament to the sophistication of modern drone flight controllers and system integration.
Software as the “Clutch Actuator”
Unlike a mechanical clutch, the “double clutch” in a drone is actuated by highly advanced software algorithms. These algorithms continuously process data from a multitude of sensors, including Inertial Measurement Units (IMUs), GPS, magnetometers, barometers, and airspeed indicators. They employ sensor fusion techniques to create a robust and accurate understanding of the drone’s state. Based on this real-time data, predictive models anticipate the drone’s behavior and execute precise commands to ESCs, servo motors (for tilting props or control surfaces), and other actuators. This software effectively becomes the “clutch pedal” and “gear selector,” orchestrating the delicate sequence of engagement, disengagement, and synchronization.
Adaptive control algorithms play a crucial role, allowing the drone to adjust its transition strategy dynamically based on environmental factors like wind speed, air density, or even payload changes. This ensures that the “double clutch” maneuver remains optimal under varying conditions, maintaining stability and efficiency.
Optimizing Performance and Efficiency
The meticulous “double clutch” approach is not merely for show; it is fundamental for optimizing the performance, efficiency, and longevity of sophisticated aerial platforms. Abrupt transitions between flight modes can lead to significant energy waste, structural stress, and potential instability. By carefully synchronizing the changeover:
- Energy Efficiency: Power consumption during the transition is minimized as thrust is optimized, avoiding unnecessary expenditure from multiple propulsion systems simultaneously.
- Stability and Control: The drone maintains a controlled and stable flight path throughout the transition, preventing sudden drops, surges, or uncontrolled maneuvers that could jeopardize the mission or safety.
- Reduced Wear and Tear: While there are no mechanical gears to grind, smooth transitions reduce stress on motors, ESCs, airframes, and control surfaces, extending the lifespan of these critical components.
- Payload Integrity: For applications carrying sensitive equipment or valuable cargo, a smooth transition is paramount to prevent jarring movements that could damage the payload or compromise data collection.
Future Implications and Multi-Modal Platforms
As drone technology continues to evolve, the demand for more complex, multi-modal platforms will undoubtedly grow. We are already seeing research into drones capable of air, ground, and even underwater operation. Each transition between these radically different environments will necessitate an even more sophisticated “double clutch” strategy.
For autonomous systems, the ability to independently and intelligently execute these multi-stage transitions is a cornerstone of advanced capability. Whether it’s a delivery drone seamlessly moving from hover to efficient cruise, an inspection drone transitioning between high-speed survey and precise close-up hovering, or future platforms adapting to entirely new operational paradigms, the underlying principle of a controlled, synchronized, multi-step transition will remain paramount. The “double clutch” in flight technology, therefore, represents a fundamental design principle for achieving versatility, reliability, and peak performance in the increasingly complex world of aerial robotics.