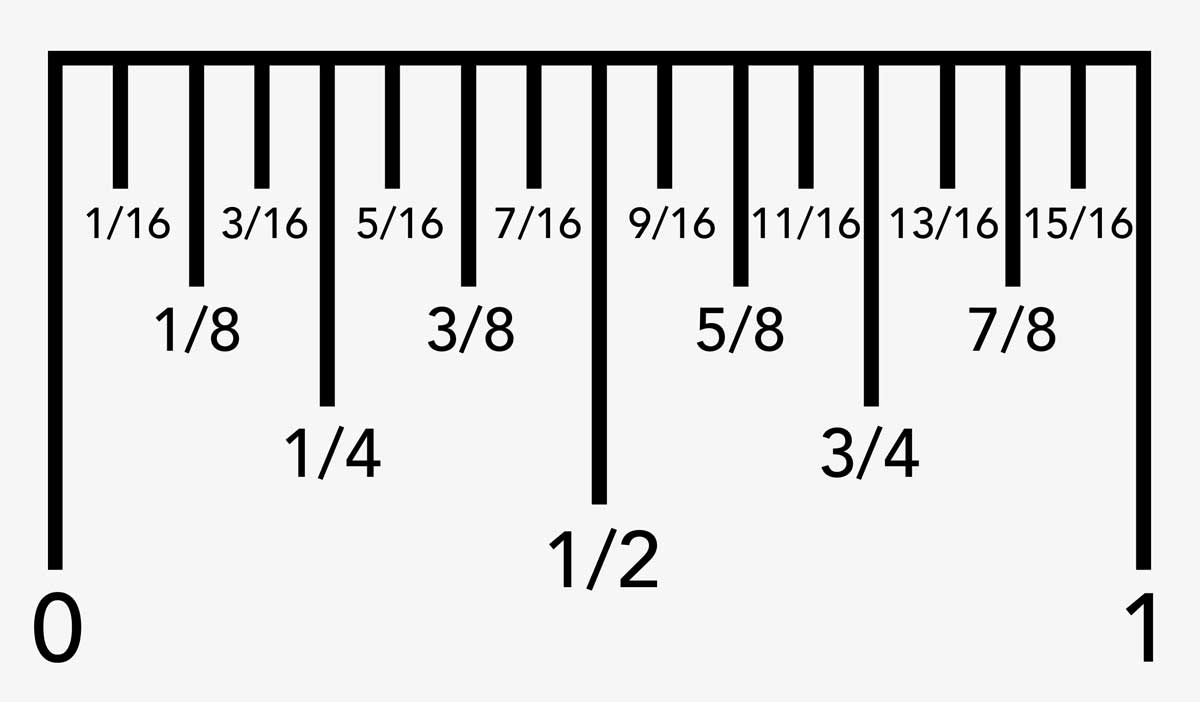
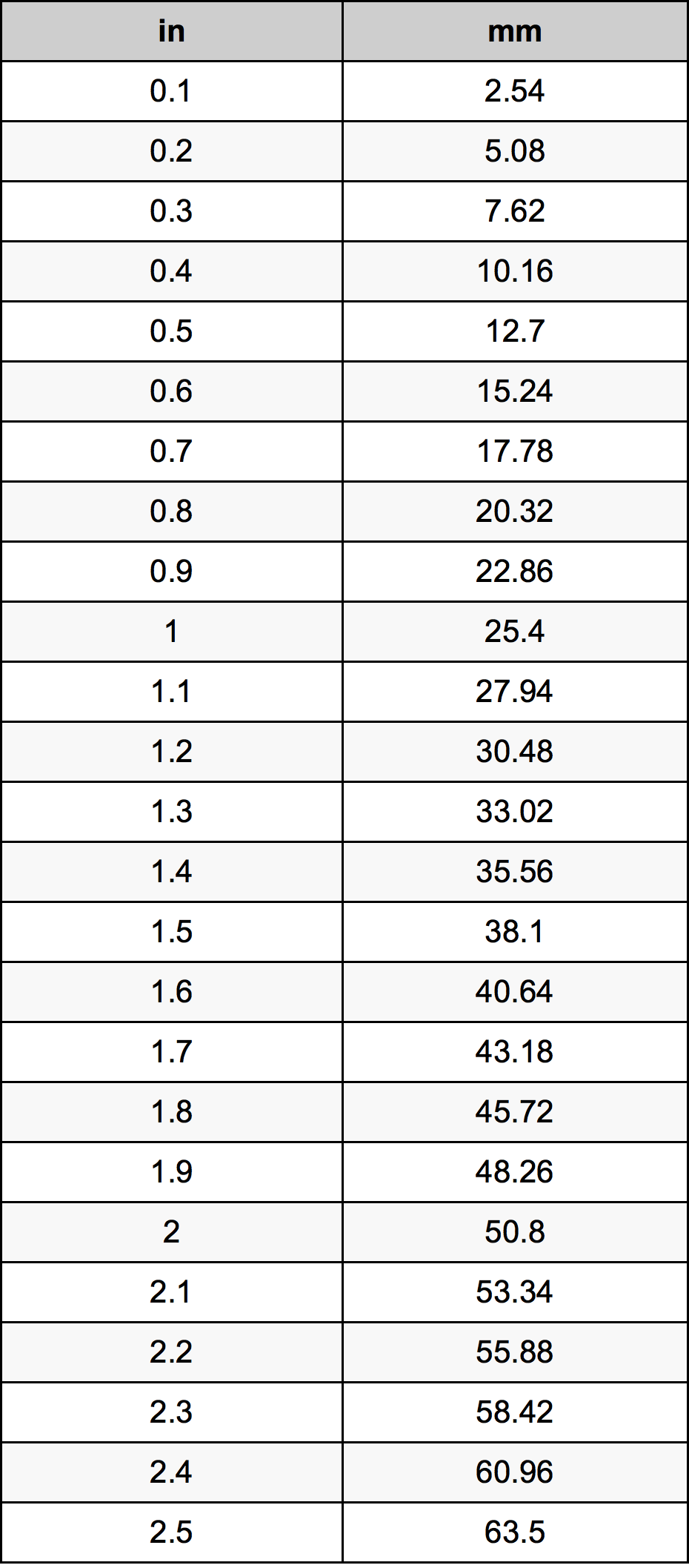
In the macroscopic world, one eighth of an inch—approximately 3.175 millimeters—might seem like an inconsequential measurement. It’s the thickness of a few credit cards stacked together, a barely perceptible sliver in the grand scheme of things. Yet, within the intricate domain of drone flight technology, this seemingly minute dimension takes on profound significance. It represents a critical threshold for precision, a margin for error, and a benchmark for the sophistication of sensors, navigation systems, and stabilization mechanisms that define the capabilities of modern unmanned aerial vehicles (UAVs). For drones operating in complex environments, performing delicate tasks, or adhering to strict safety protocols, understanding and controlling deviations measured in eighths of an inch is not just an advantage—it is often a necessity.

The Unseen Significance of Minute Measurements in Drone Navigation
The ability of a drone to hold its position, follow a precise trajectory, or return to a home point relies fundamentally on the accuracy of its navigation systems. When we speak of precision measured in eighths of an inch, we delve into the realm of highly advanced GNSS (Global Navigation Satellite System) technologies and sophisticated inertial measurement units (IMUs).
GNSS Accuracy and Positional Drift: One Eighth as a Tolerance Limit
Standard GPS, the most common form of GNSS, typically offers accuracy measured in meters. While sufficient for recreational flying, this level of precision is utterly inadequate for professional applications such as infrastructure inspection, precision agriculture, or autonomous delivery in urban canyons. This is where advanced GNSS technologies like RTK (Real-Time Kinematic) and PPK (Post-Processed Kinematic) come into play.
RTK and PPK systems utilize a base station at a known, fixed location to correct for atmospheric and satellite timing errors that affect standard GPS signals. By receiving correction data in real-time (RTK) or processing it after the flight (PPK), drones can achieve positional accuracy down to the centimeter level, and in some highly optimized scenarios, even a few millimeters. When a drone is required to hover precisely over a tiny sensor or inspect a hairline crack, a deviation of one eighth of an inch becomes a significant error. For instance, in structural inspection, identifying a specific bolt or a small anomaly on a bridge girder demands sub-centimeter accuracy. An eighth of an inch of positional drift could mean missing the target entirely or providing an image that is slightly off-center, compromising data integrity. The ongoing challenge in flight technology is to push this boundary further, ensuring that such minute positional tolerances can be maintained consistently, even under challenging conditions like signal obstruction or strong winds.
Inertial Measurement Units (IMUs) and Sensor Noise
Beyond satellite navigation, drones rely heavily on onboard IMUs, which typically comprise accelerometers, gyroscopes, and magnetometers. These sensors continuously measure the drone’s linear acceleration, angular velocity, and orientation relative to the Earth’s magnetic field. While GNSS provides absolute positioning, IMUs provide relative positioning and crucial data for stabilization.
The precision of IMU data directly impacts the drone’s ability to maintain a stable flight. Even minuscule sensor noise or drift can accumulate over time, leading to positional errors. For example, if a gyroscope has a bias that causes a persistent error of a fraction of a degree per second, over a minute of flight, this could translate into a significant angular deviation, impacting the drone’s heading or level flight. When attempting to perform a slow, deliberate movement where the drone needs to shift by precisely one inch, the internal consistency of the IMU and its ability to resolve movements smaller than one eighth of an inch become paramount. Advanced sensor fusion algorithms combine IMU data with GNSS readings, barometric altitude, and sometimes optical flow sensors to produce a more robust and accurate estimate of the drone’s state. The goal is to filter out noise and integrate data streams to achieve a composite positional accuracy that minimizes any error accumulation to within fractions of an inch, safeguarding critical operations from minute, compounding errors.
Obstacle Avoidance and the Resolution of Detection
The ability of a drone to perceive its environment and avoid collisions is perhaps where the concept of “one eighth of an inch” most tangibly intersects with its operational safety and functional limits. Autonomous flight, especially in confined or complex spaces, hinges on the drone’s capacity to detect, classify, and react to obstacles of varying sizes with exceptional precision.
LiDAR and Sonar: Detecting Fine Anomalies
LiDAR (Light Detection and Ranging) and sonar sensors provide drones with environmental mapping capabilities. LiDAR systems emit laser pulses and measure the time it takes for them to return, creating a detailed 3D point cloud of the surroundings. The resolution of this point cloud dictates the smallest feature or gap the drone can discern. For tasks such as inspecting pipelines for corrosion, analyzing wind turbine blades for hairline cracks, or navigating through dense foliage, a LiDAR system capable of detecting objects or structural deviations as small as one eighth of an inch is revolutionary. This level of resolution allows for the identification of subtle defects that might otherwise go unnoticed, potentially averting catastrophic failures.
Similarly, ultrasonic sonar sensors measure the time-of-flight of sound waves to detect proximity to objects. While typically offering lower resolution than LiDAR, advanced sonar systems, particularly those designed for short-range detection in highly enclosed spaces, are being developed to identify small protrusions or obstacles. In underground mine mapping or inspecting the interior of large industrial vessels, where GPS is unavailable and visual sensors are hampered by poor lighting, the ability to “feel” the environment with precision down to one eighth of an inch can prevent critical collisions. The challenge lies in minimizing sensor noise and interference, ensuring that these minute detections are reliable and actionable, even when the drone is flying at speed.
Visual SLAM and Environmental Mapping
Simultaneous Localization and Mapping (SLAM) is a core technology for autonomous drones, enabling them to build a map of an unknown environment while simultaneously tracking their own position within it. Visual SLAM, which uses cameras as its primary sensor, relies on identifying and tracking distinct features in the environment. The fidelity of the map and the precision of the drone’s localization within it are directly tied to the camera resolution, the algorithms employed, and the texture of the environment.
When navigating very tight spaces, such as inside ducts, between complex machinery, or through dense tree canopies, the drone must not only avoid large obstacles but also manage clearance for its propellers and antennae. A visual SLAM system capable of recognizing the boundaries of an opening with an accuracy of one eighth of an inch allows the drone to confidently traverse gaps that are only marginally larger than its own footprint. This requires not only high-resolution cameras but also sophisticated computer vision algorithms that can track features and estimate depth with sub-millimeter precision. The ability to distinguish between a clear path and a potentially hazardous protrusion, even when that protrusion is only an eighth of an inch, means the difference between mission success and an expensive crash.
Stabilization Systems: Counteracting Vibrations and Micro-Movements
Maintaining a stable platform is fundamental for any drone, impacting everything from flight efficiency to data quality. The smaller the acceptable deviation, the more sophisticated the stabilization system must be, pushing the limits of mechanical and electronic engineering to manage forces that might otherwise translate into oscillations greater than one eighth of an inch.
Gyroscopic Precision and Gimbal Stability
Gimbals are essential for isolating cameras and other sensors from the drone’s vibrations and angular movements. A high-quality gimbal utilizes incredibly precise gyroscopes and motors to counteract even the slightest pitch, roll, or yaw. For cinematic aerial photography, mapping, or detailed inspection, the camera must remain perfectly still relative to the subject, irrespective of drone movement. Any instability exceeding one eighth of an inch in terms of image shift or angular displacement can result in blurry footage, inaccurate measurements, or misaligned photogrammetric data.
The gyroscopes within these gimbals must be sensitive enough to detect micro-vibrations and angular changes that are fractions of a degree, and the motors must respond instantaneously to nullify these movements. Achieving this level of stability demands high-frequency control loops and robust mechanical designs that minimize play and resonance. When capturing highly detailed imagery of a small component, the ability of a gimbal to maintain focus and framing with an accuracy of one eighth of an inch is critical for obtaining usable data.
Airflow Dynamics and Propeller Balancing at Small Scales
Even seemingly minor mechanical imperfections can translate into significant issues at high rotational speeds. Propeller balancing is a prime example. An imbalance of a fraction of a gram on a propeller tip, if left uncorrected, can cause vibrations that resonate through the drone’s frame. These vibrations can be detrimental to sensors, blur camera footage, and even degrade the performance of IMUs, introducing noise that complicates navigation.
Ensuring that all propellers are balanced to within tolerances that prevent more than one eighth of an inch of oscillatory movement at the drone’s frame is a meticulous process. Manufacturers employ precise balancing machines, and drone operators often fine-tune this further. Moreover, understanding the airflow dynamics around propellers and the drone’s body is crucial for stable flight. Micro-turbulences or subtle aerodynamic imperfections, when multiplied by flight speed, can create forces that cause the drone to drift or oscillate. Advanced flight controllers continuously adjust motor speeds based on IMU feedback to counteract these forces, aiming to keep the drone’s position and orientation stable to within fractions of an inch, even in gusty conditions.
The Future of Precision Flight: Autonomous Operations and Sub-Millimeter Accuracy
The trajectory of drone technology is undeniably towards greater autonomy and precision. As applications become more specialized and demanding, the significance of measurements like one eighth of an inch will only intensify, paving the way for capabilities that were once confined to science fiction.
Micro-Drone Swarms and Confined Space Navigation
The development of micro-drones, often weighing mere grams, operating in swarms, and navigating extremely confined spaces, exemplifies the need for ultra-precision. Imagine a swarm of tiny drones inspecting the intricate wiring within a power plant or searching for survivors in a collapsed building. For these drones, an eighth of an inch is a substantial distance, representing a significant portion of their own body dimension. Their navigation systems must achieve unprecedented levels of accuracy, relying on highly localized sensing—such as optical flow, miniaturized LiDAR, or even acoustic sensors—to avoid collisions with each other and with the environment. Algorithms for swarm coordination must account for the physical envelopes of each drone with sub-millimeter precision to prevent mid-air impacts, ensuring the collective mission success.
Advanced Sensor Fusion and AI-Driven Trajectory Planning
The future of achieving consistently precise drone flight will be driven by increasingly sophisticated sensor fusion techniques, integrating data from an ever-growing array of sensors. Beyond traditional GNSS, IMU, and visual data, drones may incorporate millimeter-wave radar for fine-grained distance measurement, hyperspectral sensors for material analysis, and even bio-inspired sensors for enhanced perception.
AI and machine learning will play a pivotal role in processing this torrent of data, enabling drones to dynamically plan and execute trajectories with unparalleled accuracy. An AI-driven system could learn to predict and compensate for subtle aerodynamic effects, anticipate wind gusts, or adapt to environmental changes with a responsiveness that keeps the drone’s positional error consistently below one eighth of an inch. This level of precision is not just about avoiding obstacles; it’s about enabling drones to perform tasks that demand the dexterity of human hands, whether it’s manipulating delicate objects, performing intricate repairs, or carrying out scientific measurements with extreme accuracy. In this evolving landscape, the seemingly small measurement of one eighth of an inch represents a significant frontier in the ongoing quest for ultimate control and reliability in drone flight technology.