The seemingly simple concept of the distance formula in geometry forms a foundational pillar for a multitude of advanced technologies, especially within the realm of modern drone applications. Far from being an abstract mathematical exercise, the ability to precisely calculate the distance between two points in space is a critical enabler for everything from accurate mapping and autonomous navigation to intelligent object tracking and sophisticated remote sensing. Understanding this fundamental geometric principle is the first step toward appreciating the intricate algorithms that power the next generation of unmanned aerial systems (UAS).
The Foundation of Spatial Understanding
At its heart, the distance formula provides a systematic method for determining the shortest linear distance between any two points in a coordinate system. While it can be extended to three-dimensional space and beyond, its most common and illustrative application is within a two-dimensional Cartesian plane, often represented by X and Y axes.

Euclidean Distance: The Core Concept
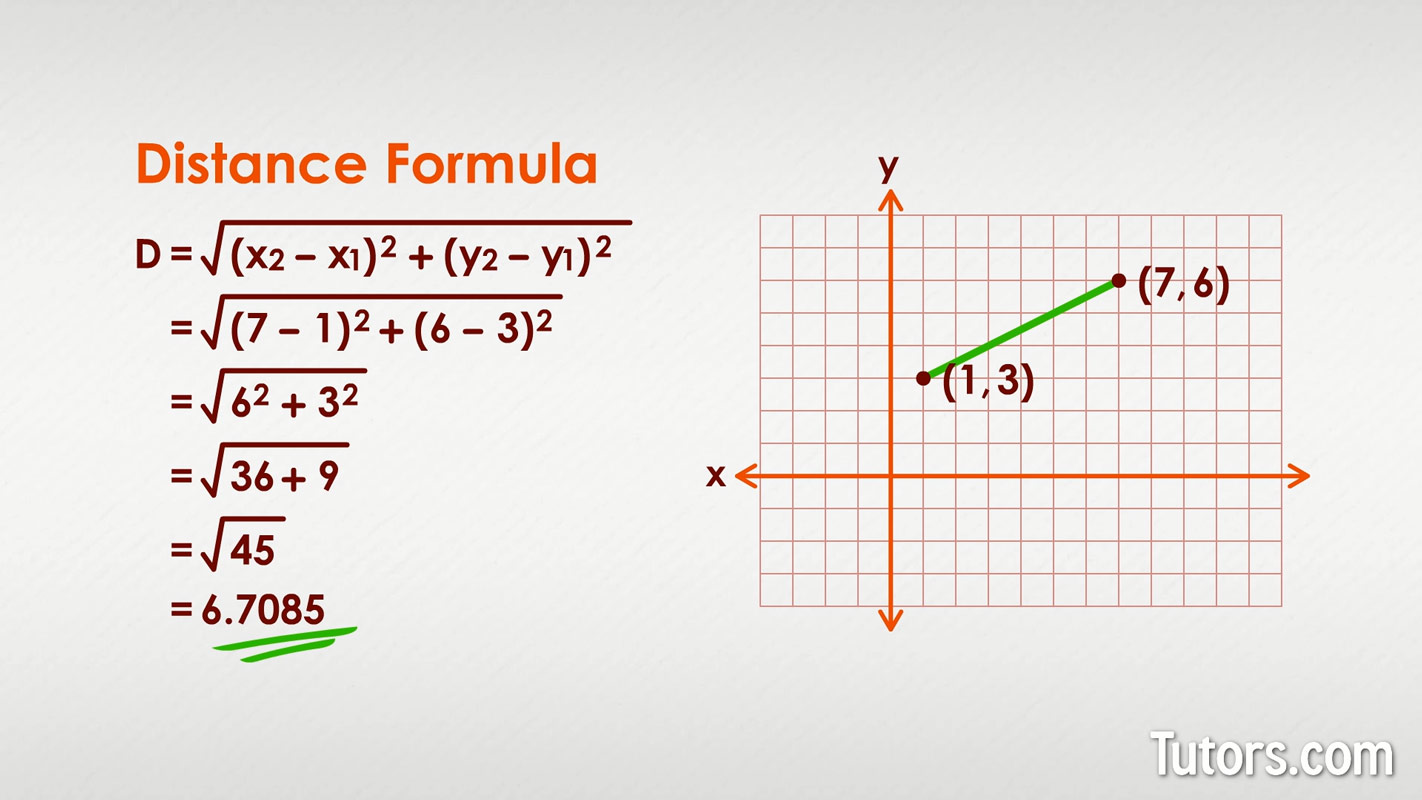
The distance formula, in its most recognized form, calculates what is known as Euclidean distance. For two points, P1 with coordinates (x1, y1) and P2 with coordinates (x2, y2), the distance (d) between them is given by:
$d = sqrt{(x2 – x1)^2 + (y2 – y1)^2}$
This formula essentially quantifies the straight-line separation between two locations. In a real-world scenario, particularly with drones, these coordinates might represent the geographical position (latitude, longitude, or UTM coordinates) of two distinct points on a map, or the relative positions of objects in a drone’s sensor view. The accuracy of these calculations is paramount for a drone to understand its environment, execute precise maneuvers, and collect reliable data.
The Pythagorean Theorem’s Role
The elegance and intuitiveness of the Euclidean distance formula stem directly from the ancient Pythagorean theorem. Imagine a right-angled triangle formed by the two points (x1, y1) and (x2, y2), and an auxiliary point (x2, y1). The horizontal distance between (x1, y1) and (x2, y1) is simply the absolute difference |x2 – x1|, which forms one leg of the right triangle. Similarly, the vertical distance between (x2, y1) and (x2, y2) is |y2 – y1|, forming the other leg. The distance ‘d’ between (x1, y1) and (x2, y2) is the hypotenuse of this triangle.
According to the Pythagorean theorem, the square of the hypotenuse is equal to the sum of the squares of the other two sides ($a^2 + b^2 = c^2$). Applying this, we get:
$d^2 = (x2 – x1)^2 + (y2 – y1)^2$
Taking the square root of both sides yields the familiar distance formula. This geometric interpretation is crucial, as it provides a robust mathematical framework that can be extended to three dimensions (adding a (z2 – z1)^2 term under the square root) to account for altitude, which is critical for aerial platforms like drones.
Distance Formula in Drone Mapping and Photogrammetry
One of the most transformative applications of drone technology lies in mapping and photogrammetry. Here, the distance formula is not just a theoretical concept but a fundamental tool for converting raw image data into accurate, measurable spatial models.
Ground Sampling Distance (GSD) and Resolution
The distance formula is inherently tied to the concept of Ground Sampling Distance (GSD), a critical metric in photogrammetry. GSD refers to the actual distance on the ground that each pixel in an image represents. A lower GSD means higher resolution and greater detail. Calculating GSD involves understanding the drone’s flight altitude (distance from the camera to the ground), the camera’s focal length, and the sensor’s pixel size. While not a direct application of the (x2-x1)^2 + (y2-y1)^2 form, the underlying geometric principles of similar triangles and ratios—which are based on linear distances—are fundamental. Accurate flight planning software uses these calculations to determine optimal flight altitudes and image overlaps to achieve desired GSDs across the mapping area. The distance between ground control points (GCPs) and their corresponding pixel locations in images also relies on distance calculations for precise georeferencing.
3D Reconstruction and Volumetric Measurements
When drones capture overlapping images from various angles, photogrammetry software uses sophisticated algorithms to reconstruct a 3D model of the terrain or objects. The core of this process involves identifying corresponding points across multiple images and then, using camera pose (position and orientation) and intrinsic parameters, triangulating their 3D coordinates. The distance formula in three dimensions is then used extensively to:
- Calculate actual distances: Measure the length of roads, perimeters of buildings, or distances between features directly on the 3D model.
- Determine areas and volumes: Calculate the surface area of a roof or the volume of a stockpile, which are derived from a multitude of distance calculations between adjacent points forming polygons and solids. This is invaluable for construction progress monitoring, stockpile management, and land surveying.

Enabling Autonomous Flight and Navigation
The dream of fully autonomous drone operation, where UAS can navigate complex environments without constant human intervention, relies heavily on real-time distance calculations. From adhering to pre-programmed flight paths to avoiding unforeseen obstacles, the distance formula is a core mathematical primitive.
Waypoint Navigation and Path Planning
Autonomous drones often operate by following a series of waypoints – predefined geographical coordinates. The flight controller continuously calculates the distance between the drone’s current position (x1, y1, z1) and the next target waypoint (x2, y2, z2) using the 3D distance formula. This distance informs the drone’s propulsion system how much power to apply and in which direction to steer to reach the waypoint efficiently. Path planning algorithms, especially for optimizing flight efficiency or avoiding restricted zones, calculate cumulative distances along various potential paths to identify the most suitable trajectory. If a drone deviates from its intended path, the distance formula helps quantify the error and guides corrective maneuvers to return to the planned route.
Obstacle Avoidance and Collision Detection
Perhaps one of the most safety-critical applications, obstacle avoidance systems rely profoundly on distance measurements. Drones equipped with LiDAR, ultrasonic sensors, or stereo vision cameras continuously scan their surroundings to detect potential obstacles. These sensors measure the distance to objects in the drone’s immediate vicinity. The drone’s onboard computer then uses these distance readings (often relative to the drone’s own position) to:
- Identify potential collisions: By calculating the distance between the drone’s predicted trajectory and detected obstacles, the system can determine if a collision is imminent.
- Execute avoidance maneuvers: If an obstacle is too close (distance falls below a critical threshold), the drone can autonomously alter its flight path, ascend, descend, or stop to prevent an impact. This real-time spatial awareness, driven by constant distance calculations, is vital for safe and reliable autonomous operation in dynamic environments.
AI Follow Mode and Object Tracking
Beyond static mapping and pre-programmed flight, the distance formula plays a pivotal role in dynamic drone applications like AI follow mode and intelligent object tracking, enabling drones to interact intelligently with moving subjects.
Maintaining Relative Position
AI follow mode allows a drone to autonomously track a moving subject (e.g., a person, vehicle, or animal) while maintaining a predetermined distance and angle. The drone’s vision system or GPS receiver identifies the target’s position, and the onboard AI continually calculates the distance between itself and the target. If this distance deviates from the desired set point, the drone’s flight controller makes real-time adjustments to its speed and direction to either close the gap or increase separation, ensuring the subject remains perfectly framed and within range. This dynamic maintenance of relative distance is a continuous application of the distance formula.
Real-Time Spatial Awareness
Object tracking extends this concept, allowing drones to not only follow but also predict the movement of subjects, especially in complex scenarios. By tracking an object’s position over time, the drone can calculate its speed and trajectory. This involves calculating the distance the object has moved between consecutive frames or time intervals. These distance-over-time calculations enable the AI to anticipate future positions and adjust the drone’s own flight path accordingly, maintaining optimal tracking performance even if the subject briefly goes out of sight or makes sudden movements. The accuracy of these real-time distance measurements directly impacts the fluidity and effectiveness of the tracking system.
Remote Sensing and Data Analysis
Remote sensing involves collecting information about an area or object without making physical contact, often using specialized sensors on drones. The analysis of this remotely sensed data frequently leverages geometric distance to derive meaningful insights.
Analyzing Spatial Relationships
In remote sensing, data layers representing various environmental parameters (e.g., vegetation health, soil moisture, thermal signatures) are often overlaid. Analyzing the spatial relationships between these parameters—such as how far a certain level of vegetation stress extends from a known pollutant source, or the average distance between specific tree species—involves extensive use of distance calculations. Geographic Information Systems (GIS) software, which processes drone-collected remote sensing data, incorporates the distance formula for proximity analysis, buffer zone creation, and calculating spatial autocorrelation, revealing patterns and dependencies within the data.
Change Detection Over Time
Drones are increasingly used for monitoring changes over time, such as land use changes, glacier retreat, or coastal erosion. By collecting data from the same area at different time points, analysts can compare the geometric positions of features. The distance formula is then used to quantify the extent of these changes—for instance, measuring how many meters a coastline has receded, or the growth in distance of an urban sprawl over several years. This ability to precisely measure spatial shifts provides invaluable data for environmental management, urban planning, and scientific research.
In conclusion, the simple geometric distance formula is far from a mere academic exercise. It is a fundamental mathematical tool that underpins the sophisticated algorithms and advanced capabilities seen in modern drone technology. From ensuring accurate maps and enabling safe autonomous flight to performing intelligent object tracking and detailed remote sensing analysis, the precise calculation of distance is an indispensable element driving innovation in the UAS industry.