In the realm of advanced technology and innovation, particularly concerning autonomous systems, mapping, and remote sensing, understanding the fundamental geometric concept of a “base” for a 3D figure transcends mere academic definition. It becomes a critical operational parameter, informing algorithms, guiding autonomous navigation, and enabling precise data interpretation. While intuitively simple, the application of this concept in a digital, real-world context, often driven by drone technology, reveals layers of complexity and innovation.
Fundamental Geometric Principles in Modern Tech
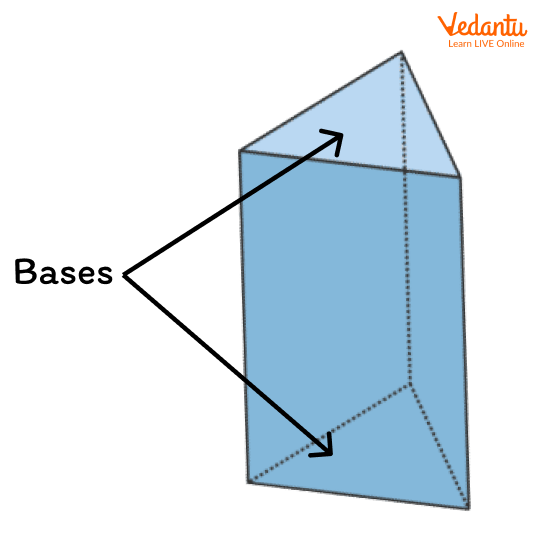
At its core, the “base” of a 3D figure, whether a prism, pyramid, or cylinder, refers to the face or surface upon which it conceptually rests or from which it is constructed. Traditionally, this implies a foundational plane that defines its orientation and stability. In the context of computational geometry and spatial analysis, this definition evolves, becoming a dynamic and context-dependent concept crucial for how machines perceive, interact with, and model the physical world.
Defining the “Base” in a Digital Context
For advanced tech systems, particularly those involved in 3D reconstruction and environmental understanding, the “base” is not always a perfectly flat, geometric plane. Instead, it often represents the primary contact surface, the lowest extent, or the foundational footprint of an object within a given coordinate system.
- Geospatial Data: For buildings captured by drone photogrammetry or LiDAR, the base is typically the ground-level footprint, defining its exact position and extent on the Earth’s surface. This is critical for urban planning, infrastructure monitoring, and accurate mapping.
- Object Recognition: When an AI system identifies a tree, its “base” might be the point where its trunk emerges from the ground, or the spread of its root system for stability analysis. For a vehicle, it’s the area of contact between its tires and the road surface.
- Point Clouds and Meshes: In raw 3D data like point clouds, the “base” might be identified through algorithms that detect planar surfaces at the lowest Z-coordinate (or lowest altitude) relative to the object’s overall bounding box, or by identifying points that exhibit contact with a designated ground plane. This involves sophisticated filtering and segmentation techniques to differentiate the object from the terrain it sits on.
The challenge lies in translating these abstract geometric definitions into actionable insights for autonomous systems. This requires robust algorithms that can intelligently infer the base amidst noisy data, varying terrain, and complex object geometries.
From Euclidean Geometry to Computational Vision
The transition from ideal Euclidean shapes to the messy reality of the physical world is where computational vision and advanced algorithms come into play. While classic geometry provides the theoretical framework, real-world data acquired by drones (e.g., through LiDAR, photogrammetry, or multispectral sensors) is often imperfect, incomplete, or highly detailed.
- Feature Extraction: Algorithms must intelligently extract features that correspond to a “base.” This might involve identifying sharp changes in elevation, distinct material properties (e.g., concrete slab vs. grass), or boundaries of uniform planes.
- Normalization and Alignment: Once a potential base is identified, systems often normalize the object’s orientation relative to this base. For instance, a 3D model of a building might be aligned such that its “base” is perfectly planar and parallel to the X-Y plane of a local coordinate system, simplifying subsequent analysis like volume calculation or structural integrity checks.
- Semantic Understanding: Modern AI takes this a step further by adding semantic understanding. It doesn’t just identify a flat surface; it recognizes it as the ground, or as the foundation of a building, enabling more intelligent decision-making for tasks like autonomous landing or construction progress monitoring.
The Base as a Foundation for Mapping and Remote Sensing
In the burgeoning fields of geospatial intelligence, mapping, and remote sensing, the concept of a “base” is absolutely foundational. Drones equipped with various sensors collect vast amounts of data, which must be processed and interpreted to create accurate models of the environment. The “base” provides the essential reference point for this interpretation.
Ground Truthing and Geospatial Reference
Accurate mapping relies heavily on establishing a robust geospatial reference. The “base” in this context often refers to the actual ground level or the lowest stable surface upon which features rest.
- Digital Terrain Models (DTMs): Drones are crucial for creating DTMs, which represent the bare earth surface without features like buildings or vegetation. Identifying the “base” of every object (its contact point with the ground) allows for filtering out non-ground points from a LiDAR point cloud, leaving only the terrain. This is vital for flood modeling, land-use planning, and infrastructure design.
- Digital Surface Models (DSMs): In contrast, DSMs include all features, with the “base” of elevated objects (like rooftops of buildings) providing the lower extent of the structure itself, but the overall “base” for the entire scene being the underlying terrain.
- Orthomosaics and 2D Projections: For creating 2D maps, the “base” (ground footprint) of objects helps project them accurately onto a planar map, ensuring correct scaling and positioning relative to real-world coordinates. Without a proper understanding of an object’s base, its representation on a map could be distorted or misplaced due to perspective issues from aerial imagery.
Object Recognition and Segmentation
Autonomous drones and AI-powered image analysis tools leverage the concept of an object’s “base” for precise recognition and segmentation within complex aerial scenes.
- Building Footprint Extraction: AI algorithms can delineate the precise footprint of buildings by identifying their base where they meet the ground. This data is invaluable for urban planning, tax assessment, and monitoring construction progress.
- Vegetation Analysis: For forestry or agriculture, understanding the “base” of individual trees or crop rows allows for accurate height measurements, canopy volume estimations, and health assessments. Drones can detect the ground level beneath dense foliage to provide precise growth metrics.
- Infrastructure Inspection: When inspecting bridges or towers, identifying the “base” helps differentiate the structure from its surroundings, enabling more focused analysis of its foundational integrity and any shifts or erosion at its contact points with the ground or water.
Volumetric Calculations and Asset Management
In industrial applications, particularly in mining, construction, and agriculture, drones are used for volumetric measurements. The “base” is a critical parameter for these calculations.
- Stockpile Measurement: Accurately determining the volume of stockpiles of coal, sand, or gravel requires identifying the precise “base” of the pile on the ground. Drone-derived 3D models, coupled with AI that defines the ground plane, enable highly accurate and automated volume calculations, replacing traditional, more labor-intensive methods.
- Cut and Fill Analysis: In earthwork projects, drones generate precise models of terrain. Identifying the original “base” (pre-excavation ground level) compared to the current “base” (excavated or filled level) allows for accurate calculation of cut and fill volumes, optimizing operations and minimizing material waste.
Autonomous Flight and Obstacle Avoidance: Interpreting the Base for Safe Navigation
For drones to operate autonomously, they must possess an acute understanding of their 3D environment, including the “base” of objects that could pose obstacles or serve as reference points. This goes beyond simple collision avoidance; it involves nuanced interpretation for intelligent decision-making.
Environmental Perception and 3D Scene Reconstruction
Autonomous drones continuously build and update a 3D model of their surroundings using a suite of sensors (e.g., LiDAR, stereo cameras, ultrasonic sensors). The “base” of detected objects plays a crucial role in constructing an accurate and navigable scene.
- Obstacle Extent: When a drone encounters a tree or a building, its sensors not only detect the visible parts but, through sophisticated processing, infer the full 3D extent. Identifying the “base” of these objects helps define their absolute position and boundaries, allowing the drone to understand where the object begins in 3D space relative to its flight path.
- Ground Plane Detection: A fundamental task for autonomous flight is to reliably detect the ground plane. This serves as the ultimate “base” for the entire environment, providing a stable reference for altitude control, vertical positioning, and identifying objects that are truly “on” the ground versus flying or elevated.
Landing Zone Analysis and Precision Landing
One of the most complex autonomous tasks for a drone is precision landing. This requires identifying a safe and stable “base” to land on.
- Terrain Slope and Flatness: Drones analyze potential landing zones for slope, roughness, and obstacles. The “base” of the drone itself (its landing gear) needs a sufficiently flat and stable surface to rest upon. AI algorithms evaluate the detected ground plane’s inclination and undulations to determine suitability.
- Obstacle Clearance: Before descending, the drone must ensure the chosen landing “base” is free of obstructions. This involves a final scan of the area to detect any small rocks, vegetation, or debris that might interfere with a safe landing.
Path Planning and Collision Detection
Understanding the “base” of obstacles is paramount for safe and efficient path planning in dynamic environments.
- Static Obstacles: When planning a path around a building or a tower, the drone needs to know the exact footprint (base) and vertical extent to calculate safe clearance distances, ensuring it does not clip any part of the structure.
- Dynamic Obstacles: For moving objects like vehicles or people, AI algorithms predict their trajectory and potential future “bases” (areas they will occupy) to plot evasive or following maneuvers.
The Evolution of “Base” Definition with AI and Machine Learning
As AI and machine learning advance, the interpretation of “base” is becoming more sophisticated, moving beyond purely geometric definitions to incorporate semantic and contextual understanding.
Semantic Segmentation and Contextual Understanding
Modern AI doesn’t just identify the lowest point of an object; it interprets what that base signifies.
- Ground vs. Roof vs. Water: AI models trained on vast datasets can differentiate between a “ground” base, a “roof” base (for objects on rooftops), or a “water surface” base, allowing for more intelligent environmental interaction. For example, a drone would approach a water base differently than a solid ground base.
- Object Functionality: Understanding the base of a structure might provide clues about its function. The base of a dam is interpreted differently than the base of a residential house, leading to different inspection or monitoring protocols.
Predictive Modeling and Dynamic Environments
In rapidly changing environments, AI can predict the “base” of moving objects or features.
- Following Moving Targets: For “AI Follow” modes, the system must continuously re-evaluate the target’s “base” relative to the ground to maintain optimal tracking angles and distances, even as the terrain changes.
- Environmental Changes: In disaster response, drones use AI to predict the evolving “base” of landslides, floodwaters, or collapsing structures, providing critical real-time information for emergency services.
Future Implications: From Static Bases to Dynamic Foundations
The concept of a “base” will continue to evolve as technology pushes the boundaries of autonomous interaction with the physical world.
Augmented Reality and Digital Twins
In the future, a precise understanding of an object’s “base” will be crucial for overlaying augmented reality information accurately onto real-world scenes, or for creating hyper-realistic “digital twins” where every physical attribute, including foundational contact, is perfectly replicated in a virtual environment. This will enable advanced simulations and predictive maintenance.
Human-Machine Interaction in 3D Space
As drones become more integrated into daily operations, intuitive human-machine interfaces will rely on these sophisticated understandings of 3D space. Users might interact with virtual representations of “bases” to designate landing zones, mark areas of interest, or define operational boundaries, making complex drone operations more accessible and efficient. The “base” thus transforms from a simple geometric term into a cornerstone of intelligent, autonomous, and intuitive interaction with our physical world.