In the rapidly evolving landscape of unmanned aerial vehicles (UAVs), understanding the lineage and relationships between various drone platforms and technologies is crucial for predicting future trends and fostering innovation. While direct generational upgrades are easily identifiable, the concept of a “4th cousin” emerges as a powerful, albeit metaphorical, framework for classifying the intricate, often subtle, connections between seemingly disparate drone systems within the Tech & Innovation niche. A 4th cousin in drone technology is not a literal genealogical relation, but rather a conceptual construct describing two distinct drone systems or technological paradigms that share a distant, fundamental architectural or philosophical design ancestor, yet have undergone multiple independent evolutionary branches and generations, leading to significant divergence in their physical form, operational capabilities, and primary applications. They represent a shared, ancient technological DNA that has been reinterpreted and adapted across vastly different developmental trajectories.
Unpacking the Kinship Metaphor in Drone Technology
The drone industry, characterized by its rapid advancements and diverse applications, often requires a lexicon beyond simple generational numbering to articulate the complex interdependencies and influences shaping its evolution. The “kinship” metaphor provides an insightful lens through which to view these relationships, moving beyond straightforward parent-child lineage to encompass broader, more intricate connections.
Beyond Direct Lineage: Generations and Ancestry
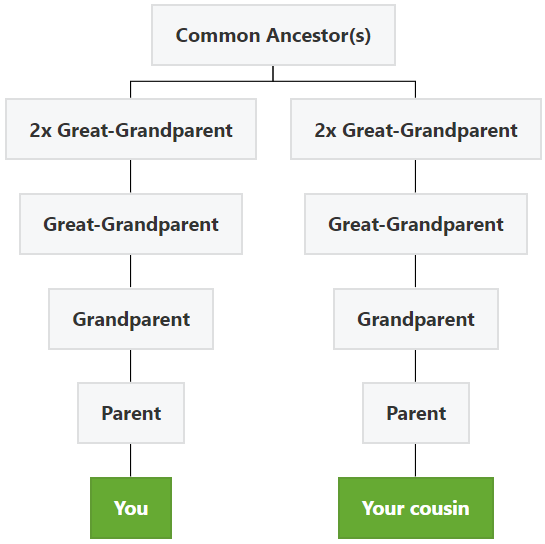
Traditionally, drone technology is often discussed in terms of generations: first-generation simple remote-controlled aircraft, second-generation with basic autopilots, third-generation integrating GPS and advanced sensors, and subsequent generations incorporating AI, full autonomy, and sophisticated data processing. This linear progression, while useful, often overlooks the parallel developments and cross-pollination of ideas that occur simultaneously across different manufacturers, research institutions, and application domains. A “parent” drone might give rise to a “child” through direct iteration and improvement, but concurrent, independent efforts might lead to “siblings” – drones developed in parallel for similar purposes, sharing much of their core technology.
The Concept of Technological Kinship
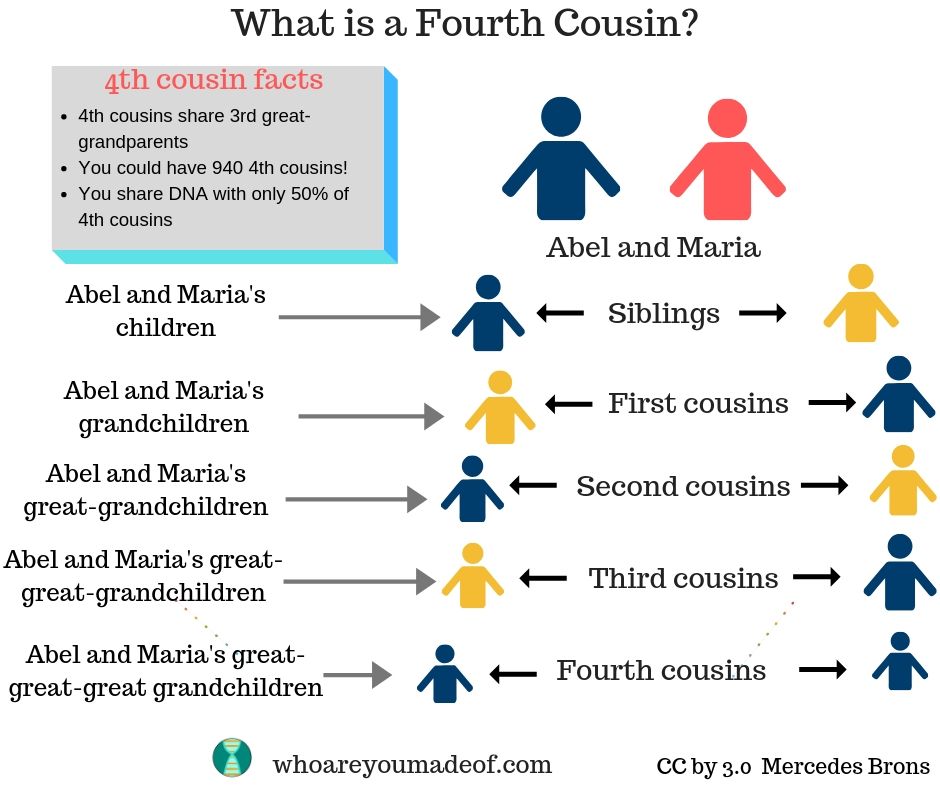
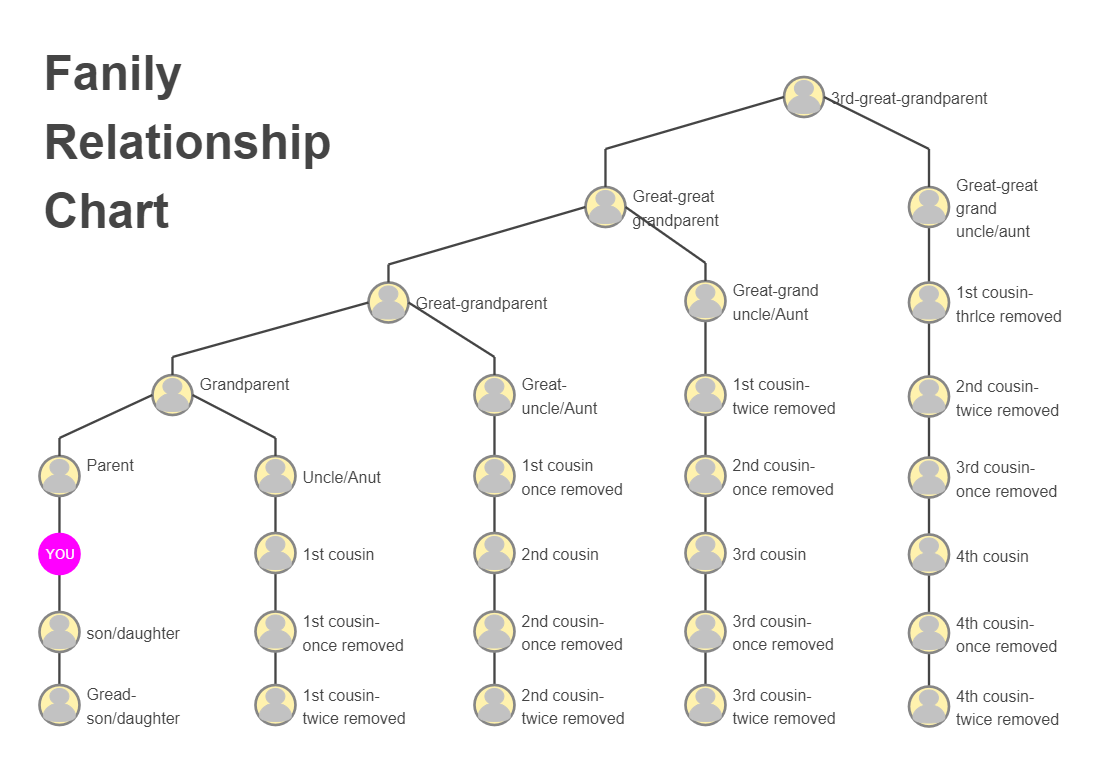
Expanding on this, “cousin” relationships describe branches of development that share a common ancestor but have diverged. A “first cousin” might represent two distinct drone platforms developed by sister companies or rival firms, both drawing heavily from a very recent, common technological breakthrough or open-source architecture, such as a particular flight controller design or propulsion system. Their core functionalities might be similar, but their specific implementations or target markets differ. As these relationships become more distant – second, third, and ultimately fourth cousins – the shared ancestry traces back to increasingly fundamental, abstract principles rather than specific components or designs. The technological “DNA” becomes more diluted but still forms an underlying connection, detectable through a deep analysis of their foundational logic and problem-solving approaches. This allows us to map the sprawling family tree of drone tech, revealing how diverse innovations are, at their root, interconnected.
Identifying 4th Cousin Drone Systems
Pinpointing a 4th cousin relationship requires looking beyond superficial similarities and delving into the bedrock principles that underpin drone design and functionality. It’s about tracing the evolutionary branches back through several layers of abstraction and independent development.
Tracing Distant Design Ancestors
The process of identifying 4th cousin drone systems involves a meticulous analysis of their architectural roots. For instance, consider the fundamental challenge of autonomous flight. An early drone designed for remote sensing in agriculture (perhaps a fixed-wing UAV using pre-programmed waypoints for mapping) and a sophisticated autonomous logistics drone designed for urban package delivery (a multi-rotor with AI-driven obstacle avoidance and dynamic route planning) might initially appear to have little in common. However, if we trace their lineage back, they might both share a common conceptual ancestor: the pioneering efforts in developing robust feedback control systems for unstable platforms, or the early theoretical work on state estimation and navigation without human intervention. This foundational knowledge, refined and specialized over decades through various hardware iterations, software paradigms, and application-specific adaptations, becomes their shared distant ancestor.
This distant ancestry isn’t about shared hardware components or even specific algorithms, but rather a common set of abstract problem-solving strategies or design philosophies. For example, the core idea of distributed propulsion for vertical take-off and landing (VTOL) might be a distant ancestor. One branch could lead to complex tilt-rotor designs, another to the simplicity of the quadcopter. After several generations of independent refinement, a highly specialized industrial inspection drone (e.g., a hybrid VTOL with advanced LiDAR and AI-powered defect detection) might be a 4th cousin to an autonomous aerial photography platform from a different lineage, both having ultimately descended from that same core VTOL principle but having optimized for vastly different operational envelopes and intelligence capabilities.
Divergence in Function and Application
What truly defines the 4th cousin relationship is the extensive divergence in function and application over these generations of independent evolution. While the distant ancestor provided a foundational concept, subsequent developments tailored these concepts to highly specific needs, pushing the descendant technologies into entirely separate operational realms. For example, one branch might have specialized in high-endurance, long-range aerial mapping (leveraging autonomous flight for vast area coverage), while its 4th cousin evolved into a low-latency FPV racing drone, prioritizing agility, speed, and real-time human interaction.
Despite their shared distant ancestor (perhaps a fundamental understanding of aerodynamic control surfaces or propulsion efficiency), their current functions – one for methodical data collection and the other for high-speed sport – are worlds apart. The AI follow mode developed for a personal drone designed for outdoor enthusiasts is functionally distinct from the AI-driven autonomous navigation of a commercial delivery drone, yet both might have evolved from early concepts of object tracking and intelligent pathfinding. This vast functional divergence, built upon a common conceptual root, is the hallmark of a 4th cousin relationship, making it challenging but insightful to identify.
The Significance of 4th Cousin Relationships in Innovation
Understanding these distant kinship ties within drone technology offers profound insights for fostering innovation and strategic development. It provides a unique perspective that can catalyze unexpected breakthroughs and inform long-term research strategies.
Cross-Pollination and Evolutionary Leaps
Recognizing 4th cousin relationships can reveal opportunities for cross-pollination of ideas and technologies that might otherwise be overlooked. When two drone systems are so functionally distinct, their development teams often operate in silos. However, identifying a shared distant ancestor can highlight fundamental principles or solutions that, though implemented differently, might be transferable. For instance, an advanced stabilization algorithm perfected in a high-speed racing drone (a 4th cousin to a slower, endurance-focused mapping drone) might, with significant adaptation, offer breakthroughs in maintaining sensor stability during long-duration flights for its distant relative.
Similarly, an innovative remote sensing technique developed for environmental monitoring could potentially inspire new methods for obstacle avoidance or payload management in an entirely different drone category. By understanding these deep-seated connections, researchers and developers can consciously seek out “cousin” technologies for inspiration, rather than limiting their scope to direct competitors or generational upgrades. This intentional cross-pollination can lead to significant evolutionary leaps, marrying a novel solution from one domain with a persistent challenge in another, thereby accelerating innovation across the industry.
Predicting Future Trajectories
Analyzing 4th cousin relationships also offers a powerful tool for predicting future technological trajectories. By tracing multiple divergent paths back to their common ancestor, one can identify underlying trends, enduring challenges, and fundamental design principles that have proven resilient across various applications. This historical perspective allows for a more informed projection of where certain technologies are likely to converge or diverge further. For example, if a common ancestor principle (e.g., modular payload integration) has consistently led to robust and adaptable drone systems across several 4th cousin lineages, it suggests that future innovation built upon this principle is likely to yield successful, versatile platforms.
Furthermore, identifying gaps where a particular foundational principle has not yet been fully explored or adapted in certain “cousin” branches can highlight promising new areas for research and development. It can help strategists anticipate which emerging technologies (like new sensor types or advanced AI algorithms for autonomous flight) are most likely to find widespread adoption across different drone families, regardless of their current functional disparities. This foresight is invaluable for investment, market positioning, and setting strategic R&D priorities.
Case Studies: Illustrating 4th Cousin Connections
To concretize the abstract concept of a 4th cousin, let’s explore hypothetical examples that demonstrate these distant yet impactful technological relationships within the drone ecosystem.
The Quadcopter’s Distant Relative in Autonomous Logistics
Consider the early, simple quadcopter designed for hobbyist FPV flight, prioritizing agility, responsive controls, and minimal payload. Its core innovation was distributed propulsion with electronic speed control for attitude stability – a straightforward application of multi-rotor kinematics. Its 4th cousin might be an advanced, fully autonomous logistics drone, designed for precision delivery in complex urban environments, featuring sophisticated AI for real-time path optimization, dynamic obstacle avoidance, and robust redundant systems.
Their shared distant ancestor is the fundamental principle of leveraging multiple, independently controlled rotors to achieve highly maneuverable VTOL flight. From this common conceptual root, the hobbyist quadcopter focused on human-piloted agility and low cost, evolving through generations of improved motors, flight controllers, and FPV systems. The logistics drone, meanwhile, diverged significantly, specializing in fully autonomous operation, integrating advanced mapping capabilities (Lidar, computer vision), sophisticated sensor fusion for navigation, and AI decision-making for complex tasks, all while adhering to stringent safety protocols. Despite their vastly different applications and levels of autonomy, their shared ‘genetic’ code for distributed VTOL propulsion links them as 4th cousins, demonstrating how a foundational idea can spawn remarkably diverse offspring.
FPV Racing Drones and Early Surveillance UAVs
Another illustrative 4th cousin relationship could exist between modern FPV racing drones and certain early-generation, fixed-wing surveillance UAVs. The racing drone, known for its extreme speed, rapid maneuvers, and immersive first-person view, pushes the boundaries of aerodynamic efficiency and low-latency control. Its primary purpose is competitive performance and thrilling user experience. Its 4th cousin, an early surveillance UAV, might have been a long-endurance, fixed-wing platform used for border patrol or environmental monitoring, relying on simple GPS waypoints and basic cameras for remote sensing.
Their distant shared ancestor could be the pioneering work in designing efficient, lightweight aerial platforms capable of carrying a payload for extended periods, and transmitting data (even if rudimentary) back to a ground station. The racing drone branch evolved from this, prioritizing speed, extreme maneuverability, and the “human-in-the-loop” experience, leading to advancements in propulsion-to-weight ratios, carbon fiber structures, and high-refresh-rate FPV systems. The surveillance UAV branch evolved to maximize flight duration, payload capacity for various sensors (thermal, optical zoom), and the development of rudimentary autonomous flight capabilities for patrolling specific areas. While one emphasizes speed and pilot skill, and the other endurance and automated data collection, their shared heritage lies in the initial challenge of sustained, efficient aerial operation with remote data transmission. This distant kinship highlights how fundamental engineering challenges can lead to profoundly different, yet conceptually linked, technological paths.