In the increasingly sophisticated world of drone technology, from autonomous flight to AI-driven remote sensing, the underlying mathematical frameworks are often intricate and highly specialized. While operators and enthusiasts might focus on flight performance or imaging capabilities, the invisible engines driving these innovations are often concepts from linear algebra. Among these foundational elements, the upper triangular matrix stands out as a deceptively simple yet profoundly powerful structure that underpins many computational efficiencies and algorithmic designs crucial for modern drone applications.
The Core Concept: Defining Triangular Matrices
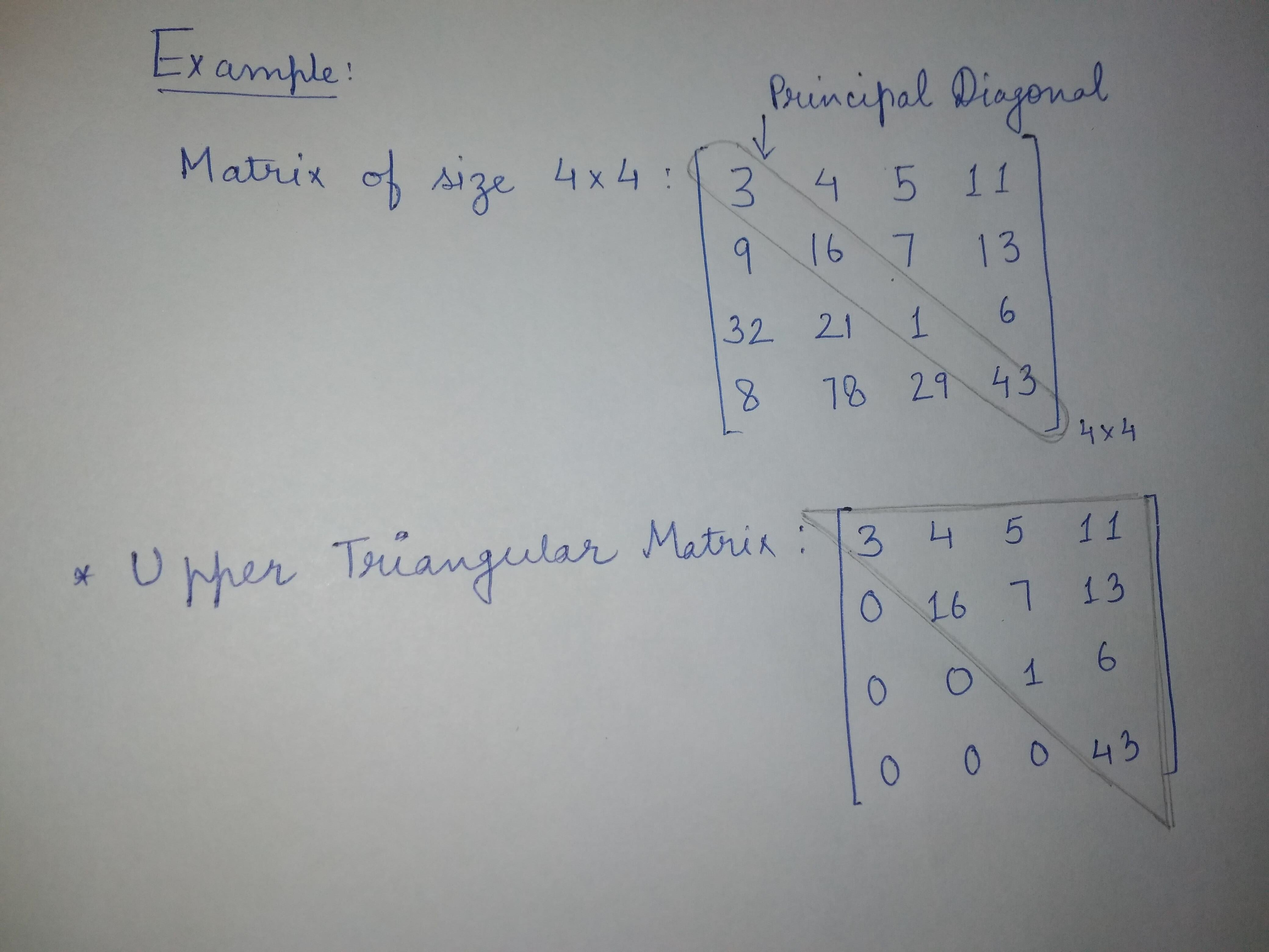
At its heart, an upper triangular matrix is a specific type of square matrix characterized by the arrangement of its elements. A square matrix is one where the number of rows equals the number of columns. What makes an upper triangular matrix unique is that all the entries below the main diagonal are zero.

Unpacking the Structure
Imagine a grid of numbers arranged in rows and columns. The main diagonal runs from the top-left corner down to the bottom-right corner. In an upper triangular matrix, any element positioned to the left and below this diagonal line is explicitly a zero. The elements on the main diagonal and above it (to the right) can be any number.
For instance, a 3×3 upper triangular matrix would look like this:
[ a b c ]
[ 0 d e ]
[ 0 0 f ]
Here, ‘a’, ‘b’, ‘c’, ‘d’, ‘e’, and ‘f’ can be any real numbers, while the three ‘0’s represent the enforced zero entries below the main diagonal. This structure has a symmetric counterpart known as a lower triangular matrix, where all entries above the main diagonal are zero.
Why Zeros Matter
The seemingly simple presence of zeros below the diagonal has significant implications for computational efficiency. In the realm of advanced algorithms used in AI, autonomous flight, and mapping, operations involving matrices—such as multiplication, inversion, and solving systems of linear equations—are common. The more zeros a matrix contains in strategic positions, the faster and less resource-intensive these computations can become. This characteristic is particularly valuable in real-time systems like those found in drones, where processing speed and low latency are critical.
Mathematical Foundations of Autonomous Systems
Autonomous drone flight, intelligent navigation, and sophisticated data analysis are not just a collection of sensors and motors; they are complex systems built upon robust mathematical models. Linear algebra, with matrices as its fundamental building blocks, provides the language and tools to describe, manipulate, and solve the multi-dimensional problems encountered by drones.
Linear Algebra’s Role in Flight
Consider a drone’s flight controller, which continuously processes data from accelerometers, gyroscopes, and GPS receivers to maintain stability and execute flight commands. This involves solving systems of linear equations to estimate the drone’s current state (position, velocity, orientation) and predict its future state. Matrices are indispensable for representing these systems compactly and performing the necessary calculations.
In predictive control or state estimation algorithms, matrices help to model the dynamics of the drone, the uncertainties in sensor readings, and the control inputs. The ability to efficiently perform matrix operations directly impacts the drone’s responsiveness, accuracy, and overall safety.
Computation and Efficiency
Modern drones operate with embedded systems that have finite computational power and energy budgets. Every millisecond of processing time and every joule of energy expended matters. This is where the structural advantages of specific matrix types, like upper triangular matrices, become paramount.
Algorithms designed to work with triangular matrices can often bypass numerous multiplications and additions that would be required for general dense matrices. This reduction in computational load translates directly into faster algorithm execution, lower power consumption, and the ability to run more complex algorithms in real-time on board the drone. For example, solving a system of linear equations using an upper triangular matrix through a process called back-substitution is significantly faster than using a general matrix, requiring substantially fewer arithmetic operations.
Upper Triangular Matrices in Action: Tech & Innovation for Drones
The utility of upper triangular matrices extends across various cutting-edge applications in drone technology, particularly within the “Tech & Innovation” sphere encompassing AI, autonomous flight, mapping, and remote sensing. Their properties are leveraged to optimize fundamental algorithms that enable these advanced capabilities.
Kalman Filters and State Estimation
One of the most prominent applications is in Kalman filters, which are ubiquitous in drone navigation and control systems. Kalman filters are powerful recursive algorithms used to estimate the state of a dynamic system (like a drone’s position and velocity) from a series of incomplete and noisy measurements.
The prediction and update steps within a Kalman filter often involve matrix inversions and multiplications. In certain formulations, particularly when dealing with the covariance matrices that represent the uncertainty in state estimates, a Cholesky decomposition might be employed. This decomposition factorizes a symmetric, positive-definite matrix into the product of a lower triangular matrix and its transpose (which is an upper triangular matrix). Working with these triangular factors significantly speeds up the computation of matrix inverses and solving linear systems, making real-time state estimation more robust and efficient. This efficiency is critical for precise autonomous flight paths and stable hovering.
Simultaneous Localization and Mapping (SLAM)
For fully autonomous drones, especially those operating in GPS-denied environments (indoors, dense urban areas, under canopies), Simultaneous Localization and Mapping (SLAM) is a cornerstone technology. SLAM allows a drone to build a map of its surroundings while simultaneously determining its own location within that map.
Many SLAM algorithms, particularly those based on graph optimization or Extended Kalman Filters (EKF-SLAM), rely heavily on solving large sparse linear systems. The matrices involved in these systems can often be structured or decomposed in ways that reveal triangular forms. For instance, in factor graph optimization, the information matrix (which represents the certainty of observations and poses) can be factorized into triangular components using methods like Cholesky decomposition or QR decomposition. This triangularization is key to efficiently computing the necessary updates for the drone’s pose and the map features, enabling faster convergence and real-time mapping capabilities crucial for autonomous navigation and exploration.
Computer Vision and Image Processing
Remote sensing and mapping drones often carry advanced cameras, generating vast amounts of image and video data. Computer vision algorithms are employed for tasks such as object detection, tracking, 3D reconstruction, and photogrammetry. Many of these algorithms involve matrix operations.
For example, perspective transformations, camera calibration, and feature matching often utilize homogeneous coordinates and transformation matrices. While not always directly upper triangular, the underlying computations in numerical libraries for linear algebra often optimize operations by recognizing or decomposing matrices into triangular forms. Furthermore, in image compression and filtering, matrix factorizations (like Singular Value Decomposition, which can involve triangular matrices during intermediate steps) are used to efficiently process and reduce the dimensionality of image data, allowing for faster transmission and on-board analysis.
AI and Machine Learning Algorithms
The burgeoning field of AI in drones, including AI follow mode, autonomous decision-making, and intelligent object recognition, is deeply rooted in machine learning. Many machine learning algorithms, particularly those involving linear models, neural networks, or optimization, utilize linear algebra extensively.
For instance, in training neural networks, the process of backpropagation involves calculating gradients, which can be seen as solving a series of linear problems. Optimization techniques like gradient descent might involve Hessian matrices (which are symmetric) that are often decomposed into triangular factors for efficient inversion or system solving. Furthermore, in dimensionality reduction techniques like Principal Component Analysis (PCA), eigenvector computation often benefits from iterative methods that can involve triangular matrix operations for efficiency, allowing drones to process large datasets from their sensors and make quick, informed decisions.
Advantages and Practical Implications
The integration of upper triangular matrices, through various decomposition and solution techniques, offers tangible benefits to the “Tech & Innovation” landscape of drones. These advantages directly impact performance, reliability, and the feasibility of advanced autonomous functions.
Streamlining Complex Calculations
The primary advantage is the significant reduction in computational complexity. For a general dense matrix of size N x N, solving a system of linear equations might take O(N^3) operations. However, if the matrix is upper triangular, solving the system via back-substitution takes only O(N^2) operations. For large N, this difference is monumental. In the context of a drone’s embedded flight computer, fewer operations mean:
- Faster Response Times: Quicker updates to navigation and control commands.
- Reduced Power Consumption: Less processing power needed, extending battery life.
- Lower Heat Generation: Important for compact, sealed drone components.
- Ability to Run More Sophisticated Algorithms: Freeing up computational resources for advanced AI, perception, and planning tasks that would otherwise be too demanding.

Robustness and Real-time Performance
The efficiency gained from working with triangular matrices contributes to the overall robustness of drone systems. Real-time performance is paramount for safety and mission success. When algorithms can execute faster, they provide more up-to-date information to the drone’s decision-making units, allowing for quicker reactions to environmental changes or unexpected events. This can mean the difference between avoiding an obstacle and a collision, or between accurately tracking a subject and losing it.
Moreover, numerical stability can sometimes be improved when computations are performed using well-conditioned triangular factors rather than large, dense, and potentially ill-conditioned matrices directly. This contributes to the reliability of autonomous systems, ensuring that mathematical errors do not accumulate and lead to unpredictable behavior during critical flight operations or data collection missions.
In essence, while an upper triangular matrix might appear to be a purely abstract mathematical construct, its properties are meticulously leveraged by engineers and computer scientists to engineer the intelligent, autonomous, and high-performing drones that define the cutting edge of flight technology and innovation.