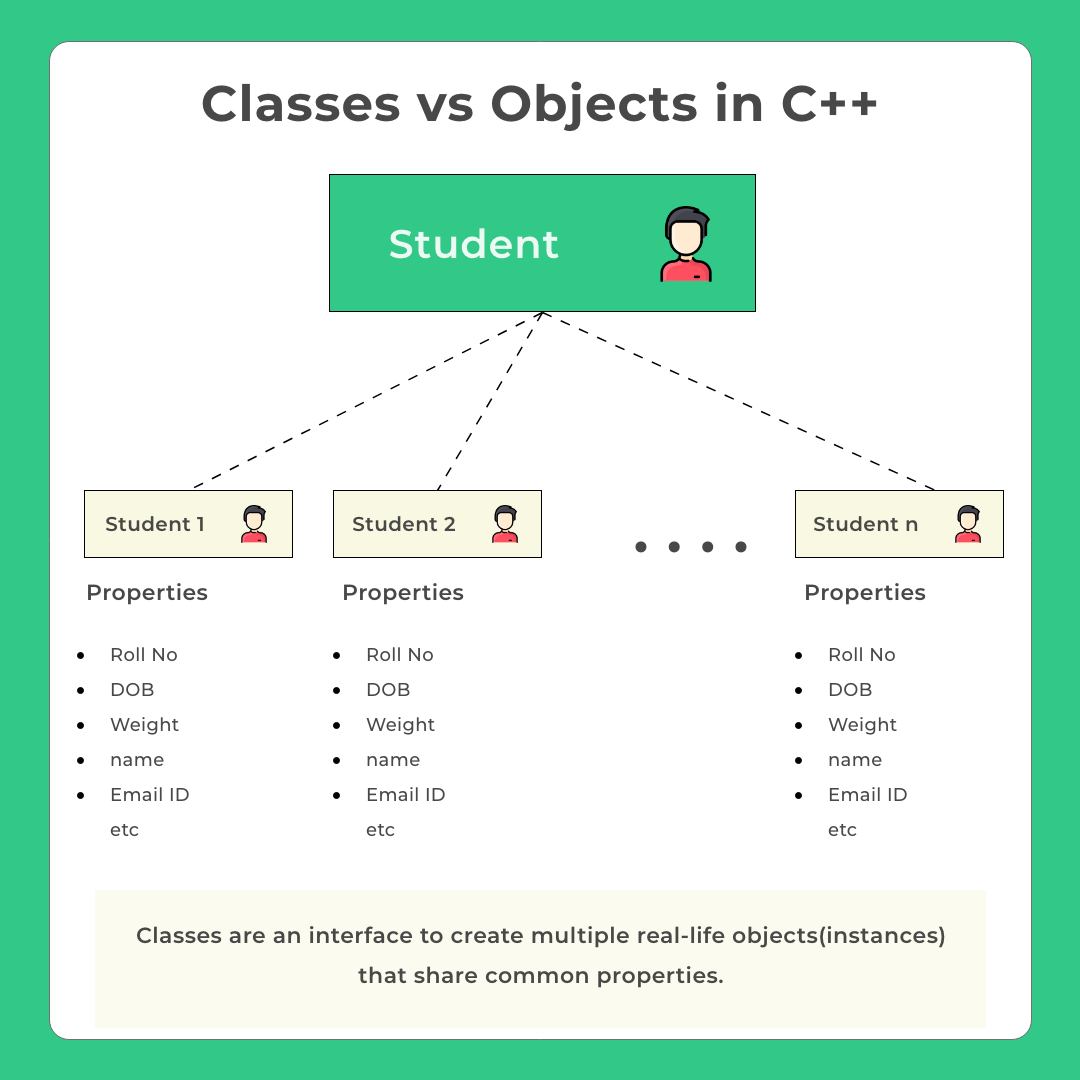
In the realm of advanced drone technology and innovation, understanding the foundational concepts of programming languages like C++ is paramount. At the heart of sophisticated drone software, from autonomous flight algorithms to real-time sensor processing and AI-driven navigation, lies the concept of an “object.” In C++, an object is a fundamental building block of an application, representing an instance of a class. It encapsulates both data (attributes) and functions (methods) that operate on that data, providing a structured and organized way to model real-world entities or conceptual components within a software system. For drones, these entities can be anything from a sensor reading, a motor controller, a navigation unit, or even an entire flight behavior system.
The Foundation of Intelligent Systems: Objects and Object-Oriented Principles
Object-Oriented Programming (OOP) in C++ provides a robust framework for developing complex drone software. The core idea is to break down a large problem into smaller, manageable pieces—objects—that interact with each other. This approach significantly enhances the development of features like AI follow mode, precise mapping, and complex remote sensing operations.
Encapsulation: Protecting Drone Data Integrity
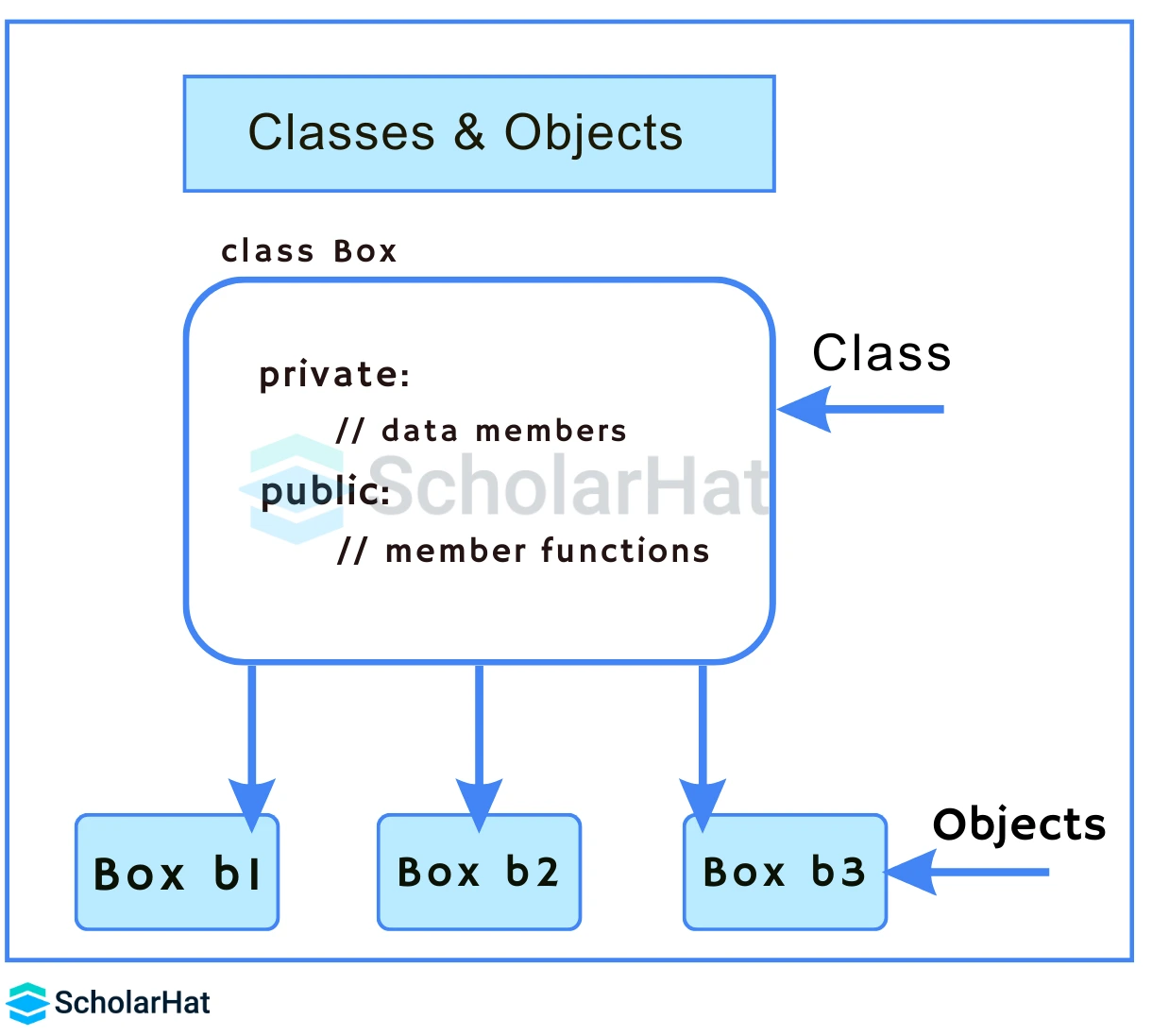
Encapsulation is one of the pillars of OOP, directly benefiting drone software development by ensuring data integrity and system stability. It involves bundling data (attributes) and the methods (functions) that operate on that data into a single unit, which is the object. In C++, this is achieved by defining a class. For instance, a GPSModule object might encapsulate latitude, longitude, altitude, and velocity data, along with methods like getCoordinates() or updatePosition(). The key here is information hiding, where the internal state of the object is protected from direct external access.
In practical drone applications, this means:
- Sensor Data Security: A
Sensorobject (e.g.,IMUSensor,LidarSensor) can encapsulate raw sensor readings and internal calibration parameters. Only specific, validated methods within that object can modify or expose this data, preventing erroneous external manipulation that could lead to unstable flight or inaccurate measurements. - Flight Controller State: A
FlightControllerobject could encapsulate parameters like current motor speeds, desired thrust, and control loop gains. By encapsulating these, the system ensures that motor commands are issued consistently and safely, preventing direct, unvalidated access that could cause critical failures. - Battery Management: A
Batteryobject might hold charge level, voltage, and temperature. Its methods would safely handle charge updates and health checks, preventing other parts of the system from accidentally corrupting critical power information.
By limiting direct access to an object’s internal data, encapsulation reduces interdependencies between different parts of the drone’s software, making the system more robust, easier to debug, and simpler to modify or extend without introducing unforeseen side effects.
Abstraction: Simplifying Complex Flight Systems
Abstraction, another fundamental OOP principle, focuses on showing only essential information and hiding the complex implementation details. For intricate drone systems, abstraction is crucial for managing complexity and allowing developers to work at a higher level of conceptual understanding.
Consider a NavigationSystem object in a drone’s software. From the perspective of the FlightManager, it doesn’t need to know the intricate mathematical details of how the navigation system fuses GPS, IMU, and vision data to estimate the drone’s precise location and orientation. It simply needs to call a method like NavigationSystem::getCurrentPosition() or NavigationSystem::getHeading().
Examples in drone innovation include:
- Autonomous Flight Commands: A high-level
AutonomousFlightobject can expose methods liketakeOff(),goToWaypoint(target), orland(). The underlying implementation—which involves precise motor control, sensor feedback loops, and collision avoidance algorithms—is abstracted away. This simplifies the creation of complex flight missions and allows AI systems to issue high-level directives without getting bogged down in low-level mechanics. - Obstacle Avoidance: An
ObstacleDetectorobject might provide a simpleisPathClear()method. The object itself internally handles the complex processing of lidar, sonar, or vision data, filtering noise, and identifying potential collisions. TheFlightControlleronly interacts with the abstractedisPathClear()result, making its decision-making process much cleaner. - Remote Sensing Data Processing: A
RemoteSensorProcessorobject could provide a method likeprocessImageData(imageBuffer). Internally, it might perform sophisticated image recognition, data fusion, or spatial analysis relevant to mapping or agricultural inspection, but externally, it offers a simplified interface.
Abstraction allows developers to build systems hierarchically, focusing on one level of detail at a time, which is indispensable for managing the vast complexity of modern drone software.
Modeling Drone Components with C++ Objects
The object-oriented paradigm excels at modeling real-world entities, making it a natural fit for representing various drone components and functionalities as C++ objects. Each physical or logical part of a drone can often be conceptualized as a class, with individual drones or components being instances (objects) of those classes.
Sensor Objects: Data Acquisition and Interpretation
Every modern drone relies heavily on a multitude of sensors. In C++, each type of sensor can be represented by its own class, leading to specific sensor objects. For example, an IMUSensor class might have attributes like acceleration (x, y, z), angular velocity (roll, pitch, yaw), and temperature, along with methods such as readAcceleration(), getGyroscopeData(), and calibrate(). A GPSReceiver object would manage satellite lock, coordinate data, and signal strength.
This object-centric approach offers:
- Modularity: New sensor types can be easily integrated by creating new classes that adhere to a common
Sensorinterface (using inheritance, discussed later), without altering existing code. - Configuration Management: Each sensor object can hold its unique calibration parameters and operational settings, simplifying their management and allowing for runtime reconfiguration.
- Parallel Processing: In multi-threaded drone software, different sensor objects can acquire and process data concurrently, feeding information to a central fusion algorithm object, optimizing real-time performance crucial for stable flight.
Motor Controller Objects: Precision Flight Actuation
The precise control of motors is fundamental to drone flight. A MotorController class could represent a single motor, encapsulating its current speed, target speed, direction, and methods like setThrust(percentage) or stopMotor(). For a quadcopter, four MotorController objects would be instantiated, each managing an individual motor.
Benefits of this approach include:
- Granular Control: Each motor can be individually controlled and monitored, allowing for complex flight maneuvers and rapid adjustments based on sensor feedback.
- Error Handling: A
MotorControllerobject can incorporate internal logic to detect motor stalls or overcurrent conditions and report them to aFaultManagerobject, enhancing the drone’s reliability and safety. - PID Integration: Proportional-Integral-Derivative (PID) control loops, vital for maintaining stable flight, can be integrated directly into a
MotorControllerobject or a higher-levelFlightStabilizerobject that interacts with motor objects.
Navigation System Objects: Path Planning and Execution
Advanced drone capabilities like autonomous flight and mapping rely on sophisticated navigation systems. A NavigationSystem object can be responsible for processing sensor inputs, estimating the drone’s position, and planning its flight path. It might contain objects representing specific algorithms (e.g., a SLAMAlgorithm object, a PathPlanner object).
This allows for:
- Complex Algorithm Management: Objects can encapsulate different navigation algorithms (e.g., A, RRT) allowing the
NavigationSystemto dynamically switch between planning strategies based on the mission context or environment. - State Management: The
NavigationSystemobject maintains the drone’s current navigation state (e.g.,IDLE,NAVIGATING_TO_WAYPOINT,AVOIDING_OBSTACLE), guiding theFlightController‘s actions. - Modularity for Updates: As navigation algorithms evolve, a
NavigationSystemobject can be updated or replaced without affecting other parts of the drone’s software, promoting continuous innovation.
Empowering Autonomous Flight and AI with Object-Oriented Design
Object-oriented design patterns significantly enhance the development of complex AI and autonomous capabilities in drones, providing flexibility and extensibility.
Inheritance: Building Specialized Drone Behaviors
Inheritance is an OOP mechanism that allows a new class (derived class) to inherit properties and behaviors from an existing class (base class). This is immensely powerful for developing scalable drone behaviors.
Imagine a base DroneBehavior class that defines common actions like startAction(), stopAction(), and updateStatus(). From this, we can derive specialized behaviors:
AutonomousFlight: Inherits fromDroneBehaviorand adds specific methods for waypoint navigation, mission execution, or predefined flight patterns.AI_FollowMode: Also inherits fromDroneBehaviorbut implements logic for tracking a target, maintaining distance, and adapting to target movement, potentially using computer vision objects.MappingMission: Inherits fromDroneBehaviorand includes methods for executing a grid pattern flight, triggering camera captures, and processing photogrammetry data.
This structure allows for a clear hierarchy of behaviors, promoting code reuse and making it easier to add new, complex autonomous functionalities without rewriting core logic.
Polymorphism: Adapting to Diverse Environments
Polymorphism (“many forms”) allows objects of different classes to be treated as objects of a common base class. This is crucial for creating adaptable and flexible drone software, especially for autonomous systems that must respond to dynamic environments.
Consider a collection of DroneBehavior objects. Even if some are AutonomousFlight, some AI_FollowMode, and some MappingMission objects, a MissionManager can simply iterate through them and call startAction() on each. The specific implementation of startAction() will vary for each derived class, but the MissionManager doesn’t need to know the specifics; it just interacts with the common interface.
This enables:
- Dynamic Mission Execution: A drone can dynamically load and execute different behaviors based on mission requirements or environmental conditions without needing explicit code for each behavior type.
- Adaptive Obstacle Avoidance: A
CollisionAvoidanceSystemmight interact with variousObstacleobjects (e.g.,StaticObstacle,DynamicObstacle). Using polymorphism, it can call a genericgetPredictedImpactTime()method on anyObstacleobject, and each object type will provide its specific calculation. - Interchangeable AI Models: Different AI models (e.g., for object recognition, path prediction) can be encapsulated within objects that inherit from a common
AIModelbase class. The drone’s core software can then seamlessly switch between or integrate different models, adapting its intelligence.
Optimizing Performance and Reliability in Drone Software
For drones, where real-time performance and unwavering reliability are non-negotiable, the careful design and implementation of C++ objects are critical.
Resource Management and Efficiency
C++ objects allow for fine-grained control over memory and computational resources, which is vital for resource-constrained drone embedded systems. Objects can be designed to efficiently manage memory, minimize allocations, and optimize data access patterns. Features like RAII (Resource Acquisition Is Initialization) ensure that resources (e.g., sensor connections, file handles, memory buffers) are properly acquired when an object is created and automatically released when it goes out of scope, preventing resource leaks that could degrade performance or crash the system mid-flight. For example, a Logger object could ensure its log file is properly opened upon construction and closed upon destruction.

Error Handling and Robustness
Objects play a significant role in making drone software robust. Well-designed objects can encapsulate error states, provide mechanisms for graceful degradation, and implement sophisticated fault tolerance. For instance, a CommunicationLink object can detect signal loss, attempt re-connection, and notify a FaultManager object, which in turn might trigger a failsafe landing. By localizing error handling within specific objects, the overall system becomes more resilient, capable of operating reliably even when individual components experience issues—a crucial feature for drone operations in challenging environments.
In conclusion, C++ objects are more than just programming constructs; they are the architectural bedrock upon which the sophisticated, intelligent, and autonomous capabilities of modern drones are built. Their ability to encapsulate data and behavior, simplify complex systems through abstraction, extend functionality through inheritance, and adapt through polymorphism makes them indispensable tools for driving innovation in the realm of flight technology.