In the dynamic world of drone technology and innovation, where autonomous flight, sophisticated mapping, and intelligent remote sensing are rapidly evolving, the fundamental concept of a multidimensional array stands as a cornerstone. Far from being a mere abstract data structure, multidimensional arrays are the invisible architects behind how advanced drone systems perceive, process, and interact with the complex real world. Understanding what it means for an array to be multidimensional is crucial for grasping the computational backbone that enables breakthroughs like AI follow mode, precise obstacle avoidance, and high-fidelity environmental mapping.
At its most basic, an array is a collection of items stored at contiguous memory locations. A one-dimensional array, often visualized as a simple list or sequence, stores data in a linear fashion. For instance, a list of GPS waypoints for a drone’s flight path might be stored in a one-dimensional array. However, the operational environment of a drone is rarely one-dimensional. It encompasses spatial dimensions, temporal sequences, and various sensor readings, all of which demand a more intricate data organization. A multidimensional array extends this concept by being an “array of arrays,” capable of representing data in multiple axes, thereby mirroring the complexity of the information it needs to manage. This hierarchical structure allows for the systematic storage and retrieval of data that has more than one attribute or context, transforming raw sensor input into actionable intelligence for autonomous systems.
The Foundation of Data Organization in Advanced Drone Systems
The transition from simple data lists to complex, interlinked data structures is where multidimensional arrays truly shine within drone technology. While a one-dimensional array might list a sequence of temperatures recorded over time, it struggles to represent data that inherently possesses spatial or more complex relationships. Imagine trying to store the entire visual input from a drone’s camera, or the intricate 3D structure of an urban environment, using only a single list. It would be cumbersome, inefficient, and virtually impossible to process effectively for real-time applications.
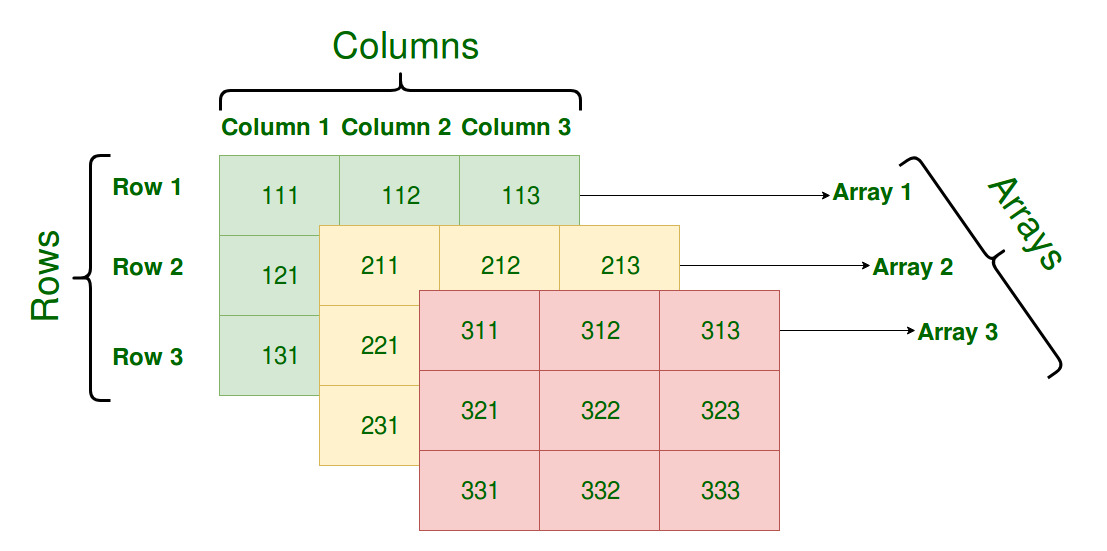
A multidimensional array, by contrast, provides a natural and intuitive way to model such data. It allows for the organization of information along multiple “dimensions” or axes, each representing a distinct characteristic or context. For example, a two-dimensional array can represent a grid, where data points are organized by rows and columns. This immediately opens up possibilities for mapping a drone’s immediate surroundings or creating a simple topographic representation. As the complexity of drone operations increases, so does the demand for higher-dimensional arrays. Three-dimensional arrays, for instance, are essential for comprehending volumetric spaces, such as the airspace around a drone for collision avoidance or the subsurface structure of an area for geological mapping. Beyond purely spatial dimensions, arrays can incorporate time, different sensor modalities (e.g., visible light, infrared, LiDAR intensity), or various features extracted by AI models, making them the indispensable data container for the next generation of autonomous flight and remote sensing applications.
Visualizing Multidimensionality: From 2D Maps to 3D Environments
The real power of multidimensional arrays becomes apparent when visualizing how they translate abstract data into concrete representations of the world around a drone. These arrays move beyond simple lists to paint a comprehensive picture, critical for navigation, obstacle avoidance, and environmental analysis.
Two-Dimensional Arrays: Mapping and Grids
Two-dimensional arrays, often referred to as matrices, are fundamental for representing planar data. In drone operations, they are invaluable for creating grid-based maps, which are crucial for numerous tasks. Imagine a drone flying over a field, tasked with monitoring crop health or identifying points of interest. A 2D array can represent this field as a grid of cells. Each cell in the array (defined by its row and column index) can store a specific piece of information: perhaps the altitude at that point, a classification of the terrain (e.g., “water,” “vegetation,” “building”), or a “cost” value for path planning (indicating how difficult it is for the drone to traverse that particular cell).
For example, in a mapping mission, a drone collects imagery. This imagery can be processed to generate a grayscale elevation map, where each pixel’s intensity corresponds to its elevation. This map is effectively a 2D array of elevation values. Similarly, for obstacle detection in a horizontal plane, a 2D array might represent the drone’s immediate vicinity, with cells containing a binary value indicating the presence or absence of an obstacle. These 2D grids allow algorithms to quickly query adjacent cells, calculate distances, and determine the most efficient or safest path for the drone to take within a defined area. The ability to represent spatial relationships efficiently makes 2D arrays a bedrock for basic navigation and environmental interaction.
Three-Dimensional Arrays: Autonomous Navigation and Voxel Spaces
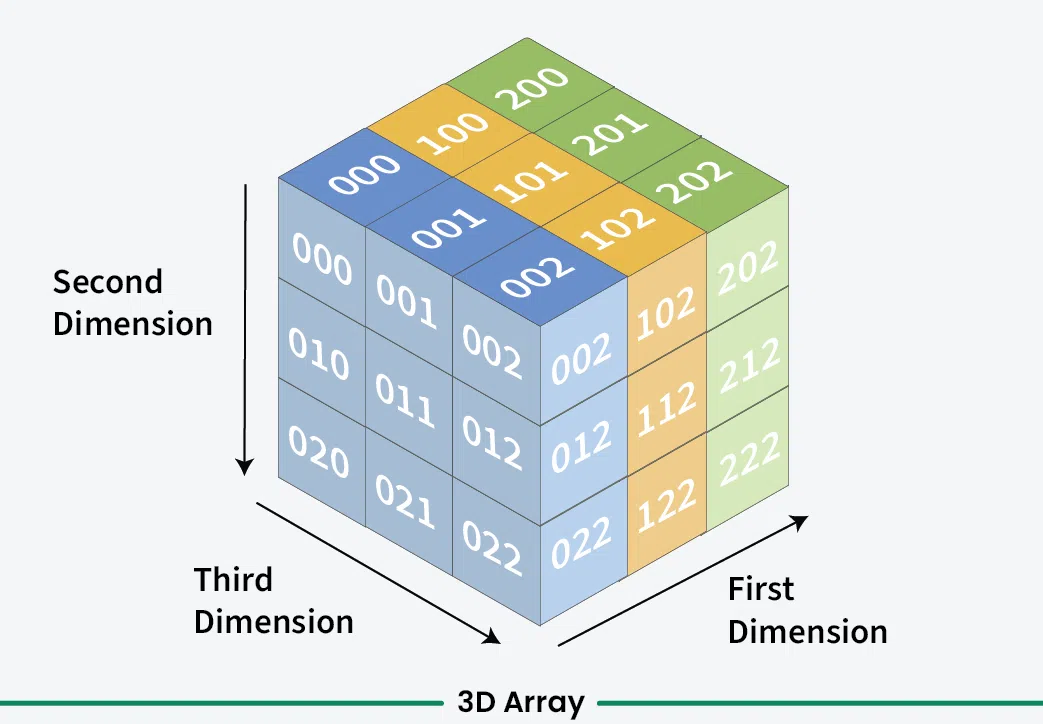
As drone capabilities advance towards true autonomy and complex airspace operations, two dimensions are simply not enough. This is where three-dimensional arrays come into play, enabling drones to understand and interact with their environment in volumetric terms. A 3D array can be visualized as a cube of data, where each element is located by three indices (e.g., x, y, z coordinates).
For autonomous flight, especially in cluttered or dynamic environments, a drone needs to comprehend the entire operational airspace. This involves understanding not just what’s on the ground or in its immediate horizontal plane, but also what’s above and below it. This is precisely where 3D arrays are utilized to create “voxel maps” or “occupancy grids.” A voxel (volumetric pixel) represents a unit of space. In a 3D array, each voxel can store information about the presence of an obstacle, the density of air currents, or other environmental factors. For instance, LiDAR sensors on a drone generate point clouds, which are then often converted into 3D voxel grids. Each voxel might contain a probability indicating whether that particular cubic meter of space is occupied by an object.

This volumetric representation is critical for sophisticated collision avoidance algorithms and intricate path planning. A drone can “see” a building, a tree branch, or another drone not just as a flat projection, but as a solid object occupying a specific volume of airspace. By analyzing this 3D array, an autonomous drone can calculate a flight path that threads through gaps, climbs over obstacles, or descends safely, ensuring robust navigation even in highly complex urban canyons or dense forest canopies. The depth provided by 3D arrays is an absolute prerequisite for truly intelligent and safe autonomous drone operations.
Beyond Spatial: Multidimensional Arrays in AI and Remote Sensing
The utility of multidimensional arrays extends far beyond merely representing physical space. They are the fundamental data structures processed by artificial intelligence algorithms and the primary format for advanced remote sensing data, forming the backbone of innovative drone applications.
AI Follow Mode and Object Recognition
Modern drones equipped with AI follow mode rely heavily on the processing of multidimensional arrays. Consider a drone tasked with autonomously following a subject, such as a hiker or a vehicle. The drone’s camera continuously captures video frames. Each individual frame is inherently a multidimensional array. For a color image, it’s typically represented as a 3D array: width x height x color_channels. Here, width and height define the spatial dimensions of the image, and color_channels (usually 3 for Red, Green, Blue) add a third dimension, describing the color information for each pixel.
When dealing with a video stream, an additional dimension of “time” is introduced, transforming the data into a 4D array: time x width x height x color_channels. This “tensor” (a generalized term for multidimensional arrays often used in machine learning) is the input to deep learning models, particularly Convolutional Neural Networks (CNNs). These neural networks are designed to process such multidimensional data, extracting hierarchical features. The network learns patterns from these arrays—identifying edges, textures, shapes, and ultimately, entire objects like a person or a car. This feature extraction, performed across the multiple dimensions of the input array, allows the drone’s AI to recognize the target, track its movement, predict its trajectory, and adjust the drone’s flight path to maintain a desired follow distance and angle. Without the organized, multidimensional structure, feeding raw pixel streams into AI models for real-time object recognition and tracking would be computationally intractable and practically impossible.
Remote Sensing and Hyperspectral Data
Drone-based remote sensing represents another frontier where multidimensional arrays are indispensable. While standard cameras capture visible light (RGB), advanced remote sensing payloads include multi-spectral and hyperspectral sensors. These sensors collect data across a much wider range of the electromagnetic spectrum, often dozens or even hundreds of distinct spectral bands, from visible light to near-infrared and short-wave infrared.
The data acquired by these specialized sensors is inherently multidimensional. It’s not just a 2D image; it’s a “data cube” or a “hypercube” that is a 3D array. This array consists of two spatial dimensions (e.g., latitude x longitude or x_pixel x y_pixel) and a third dimension representing the various spectral_bands. So, for every spatial location (pixel) on the ground, there is a full spectrum of information recorded across all the different wavelengths.
This multidimensional data allows for highly sophisticated environmental analysis. By examining the spectral signature at each pixel across its many bands, scientists can identify specific types of vegetation, assess crop health, detect mineral compositions, monitor water quality, and even identify pollutants or changes in land use with unparalleled precision. For instance, different plant species or plants under stress reflect light differently across various infrared bands. Analyzing these subtle spectral variations within the multidimensional array enables detailed classification and quantitative assessment. The ability to systematically store and process this rich, multidimensional spectral-spatial information is what makes drone-based remote sensing a transformative tool for environmental monitoring, agriculture, and geological surveys.
Computational Efficiency and Performance Implications
The widespread adoption of multidimensional arrays in advanced drone systems is not merely a matter of convenience; it’s a matter of computational necessity and performance. These data structures are not just theoretical constructs but practical tools that underpin the real-time operational capabilities of modern drones.
One of the primary benefits is organized data storage, which directly translates into efficient data retrieval and processing. When data is structured logically along its inherent dimensions, algorithms can access relevant pieces of information much faster than if it were stored in a flat, unorganized manner. This efficiency is paramount for autonomous systems that must make rapid, accurate decisions based on continuously streaming sensor data.
Furthermore, multidimensional arrays are perfectly aligned with highly optimized mathematical libraries and computing paradigms. Languages like Python, with libraries such as NumPy, or frameworks like TensorFlow and PyTorch for machine learning, are specifically designed to operate on multidimensional arrays (tensors) with extreme efficiency. These libraries often leverage parallel processing capabilities of modern CPUs and GPUs, enabling operations on vast arrays to be performed simultaneously across multiple cores. For instance, a neural network processing a video frame (a 4D array) can perform many of its calculations in parallel, dramatically speeding up inference time, which is crucial for real-time AI features like object tracking or autonomous navigation. This optimized computation allows drones to process vast amounts of sensor data—from LiDAR point clouds to high-resolution video streams and multi-spectral imagery—in milliseconds, enabling instantaneous reactions to a dynamic environment.
However, the power of multidimensional arrays also comes with challenges. Managing extremely large arrays, especially those with many dimensions (e.g., time, spatial X, spatial Y, spectral bands, polarization), can be memory-intensive. Efficient memory management and carefully designed algorithms are critical to prevent performance bottlenecks. Despite these considerations, the advantages of multidimensional arrays in structuring, processing, and interpreting complex data far outweigh the challenges, making them an indispensable component of the technological innovation driving the future of drone capabilities. They are, quite simply, how drones make sense of the world.