In the relentless pursuit of innovation within fields like autonomous flight, artificial intelligence, and advanced remote sensing, a fundamental grasp of scientific principles is paramount. At the core of any rigorous scientific or technological experiment lies the precise identification and manipulation of independent and dependent variables. These concepts are not mere academic jargon; they are the bedrock upon which reliable data is gathered, hypotheses are tested, and groundbreaking advancements are validated. Understanding their roles is crucial for engineers, researchers, and developers aiming to push the boundaries of what’s possible in tech.

The Foundation of Scientific Inquiry in Tech Innovation
Scientific inquiry, whether in a laboratory or a drone test facility, operates on a systematic approach to understanding cause and effect. This approach hinges on the clear distinction between variables.
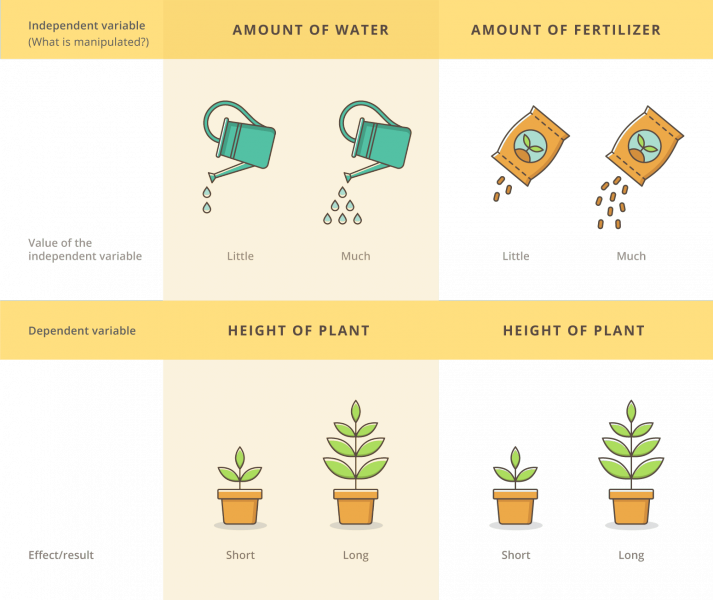
The Independent Variable (IV) is the element that the researcher or developer intentionally manipulates, changes, or selects to observe its impact. It is the presumed cause in an experiment. In the context of tech and innovation, this could be a new algorithm, a different sensor configuration, a specific flight parameter, or an environmental condition introduced during testing. The experimenter has direct control over the independent variable, systematically altering it across different trials to see how other aspects react.
The Dependent Variable (DV) is the element that is measured or observed; it is the outcome that is expected to change in response to the manipulation of the independent variable. It is the presumed effect. If a new AI algorithm is introduced to improve drone navigation, the resulting accuracy of the drone’s flight path would be a dependent variable. The dependent variable’s values “depend” on the changes made to the independent variable. Researchers meticulously collect data on the dependent variable to quantify the impact of their interventions.
Beyond these two primary variables, Control Variables are equally critical. These are all the other factors in an experiment that must be kept constant or controlled to ensure that any observed changes in the dependent variable are indeed due to the independent variable, and not some extraneous influence. For instance, when testing a drone’s battery life under different flight patterns (IV), the payload carried by the drone, ambient temperature, and initial battery charge should ideally be kept constant (control variables) to isolate the effect of the flight pattern. Neglecting control variables can lead to confounding results and invalid conclusions, undermining the scientific rigor of the innovation process.
The rigorous application of these variable concepts allows for reproducible results, facilitates systematic problem-solving, and underpins the iterative development cycle characteristic of cutting-edge technology. Without this clarity, distinguishing between genuine improvements and random fluctuations becomes impossible, stifling meaningful progress.
Applying Variable Concepts in Autonomous Flight Systems
Autonomous flight systems, from micro-drones to large UAVs, represent a complex interplay of hardware, software, and environmental factors. Isolating and understanding the impact of specific components or algorithms requires precise variable definition.
Testing Obstacle Avoidance Algorithms
The development of robust obstacle avoidance capabilities is paramount for safe and effective autonomous flight. Experiments in this area meticulously test how different algorithms perform under various conditions.
- Independent Variables (IVs):
- Algorithm Parameters: Specific tuning values within a chosen obstacle avoidance algorithm (e.g., reaction distance thresholds, minimum clearance buffer, velocity reduction profiles).
- Sensor Configuration: The type and placement of sensors used for detection (e.g., LiDAR vs. stereo vision vs. ultrasonic, single sensor vs. multi-sensor fusion).
- Obstacle Characteristics: The physical properties of obstacles introduced into the flight path (e.g., size, material composition, reflectivity, transparency, static vs. moving).
- Flight Speed: The drone’s velocity when approaching an obstacle.
- Environmental Conditions: Simulated or real-world factors like lighting levels (day/night, direct sun/shadow), weather conditions (fog, rain), and background clutter.
- Dependent Variables (DVs):
- Detection Accuracy: The percentage of obstacles successfully detected within a specified range.
- Avoidance Success Rate: The proportion of trials where the drone successfully navigates around or over an obstacle without collision.
- Reaction Time: The latency between obstacle detection and the initiation of an avoidance maneuver.
- Path Deviation: The degree to which the drone deviates from its intended flight path to avoid an obstacle, often measured as maximum lateral displacement or overall route lengthening.
- Proximity to Obstacle: The minimum distance maintained from the obstacle during avoidance.
- Computational Load: The processing power required by the algorithm, influencing real-time performance and power consumption.
- Control Variables:
- Drone Platform: The specific model and hardware of the drone used (e.g., motor characteristics, overall weight).
- Payload: Any additional equipment carried by the drone (e.g., camera, additional sensors) to ensure consistent mass and aerodynamics.
- Initial Flight Path: The predetermined trajectory the drone attempts to follow before an obstacle is introduced.
- Test Environment Layout: The precise arrangement of the testing area, including background, floor texture, and non-obstacle elements.
Optimizing Navigation and Stabilization Systems

Precise navigation and stable flight are non-negotiable for autonomous operations, particularly in critical applications like infrastructure inspection or package delivery.
- Independent Variables (IVs):
- Control Loop Gains: Parameters within PID (Proportional-Integral-Derivative) controllers or other advanced control algorithms that govern responsiveness and stability.
- Sensor Fusion Algorithms: Different mathematical approaches to combine data from multiple sensors (GPS, IMU, barometer, magnetometers) for estimating position and orientation.
- GPS Signal Quality (Simulated): Introducing varying levels of GPS signal degradation or multipath interference.
- Wind Gust Profile (Simulated/Controlled): Artificially generated wind patterns and speeds in a controlled test environment.
- Propeller Design: Testing different propeller geometries or materials.
- Dependent Variables (DVs):
- Positional Accuracy: The deviation between the drone’s estimated position and its true position, often measured in meters of error.
- Flight Path Adherence: How closely the drone follows a pre-programmed waypoint path or trajectory.
- Attitude Stability: Fluctuations in roll, pitch, and yaw angles during hover or controlled flight, indicating resistance to disturbances.
- Response Time to Disturbances: How quickly the drone recovers stability after encountering an external force like a wind gust.
- Energy Consumption: Power draw during different flight maneuvers, indicating efficiency.
- Control Variables:
- Drone Hardware: Consistent motors, ESCs (Electronic Speed Controllers), and frame structure.
- Payload: Fixed weight and distribution.
- Ambient Temperature and Pressure: Consistent atmospheric conditions during outdoor tests.
- Flight Mode: Ensuring the same flight mode (e.g., “position hold” or “waypoint navigation”) is used across all trials.
Variables in AI Follow Mode and Remote Sensing
AI-driven features and advanced remote sensing applications are transforming how we interact with and gather data from the world. The effectiveness of these technologies is directly tied to a robust experimental design.
Enhancing AI Follow Mode Performance
AI follow mode, allowing drones to autonomously track moving subjects, is a sought-after feature for content creation, security, and beyond. Optimizing its performance involves carefully manipulating variables.
- Independent Variables (IVs):
- Target Tracking Algorithms: Different computer vision models or sensor fusion approaches designed to identify and follow a specific subject.
- Environmental Obstruction Density: The level of visual clutter or physical obstacles (e.g., trees, buildings, tall grass) in the testing environment.
- Lighting Conditions: Variations in ambient light, shadows, or direct sunlight impacting visual tracking.
- Target Speed and Maneuverability: The velocity and complexity of the subject’s movement (e.g., walking, running, cycling, sudden changes in direction).
- Camera Settings: Resolution, frame rate, field of view, and zoom levels impacting the input data for the AI.
- Dependent Variables (DVs):
- Tracking Accuracy: The consistency of the drone’s position relative to the target, often measured as average distance deviation or jitter.
- Target Re-acquisition Time: The duration it takes for the drone to re-establish tracking after the target is temporarily obscured.
- Smoothness of Drone Movement: The lack of jerky movements or sudden accelerations, contributing to cinematic quality or stable monitoring.
- False Positive/Negative Rate: Instances where the drone tracks the wrong object or fails to track the correct one.
- Battery Consumption: The power draw attributed to the computational load of the AI tracking process.
- Control Variables:
- Drone Model: The specific drone platform with consistent flight characteristics.
- Initial Distance and Angle: The consistent starting position of the drone relative to the target.
- Subject Attire/Appearance: Consistent clothing or visual features of the tracked subject to avoid bias in visual recognition.
- Background Complexity: The general level of detail and potential distractions in the visual environment.
Data Acquisition through Remote Sensing
Remote sensing, utilizing drones for mapping, environmental monitoring, and data collection, relies heavily on the quality and interpretability of the acquired data.
- Independent Variables (IVs):
- Sensor Type and Configuration: The specific type of sensor payload (e.g., multispectral, hyperspectral, LiDAR, thermal, high-resolution RGB) and its settings (e.g., spectral bands, pulse repetition rate).
- Flight Altitude and Speed: The drone’s height above ground and its velocity during data collection.
- Overlap and Sidelap: The percentage of photographic or sensor data overlap between successive flight lines and images.
- Time of Day/Season: The solar angle, presence of shadows, and vegetation growth stage impacting reflected light.
- Data Processing Algorithms: Different software methodologies for stitching images, creating point clouds, or extracting features.
- Dependent Variables (DVs):
- Data Accuracy: The precision of measurements extracted from the data (e.g., topographical accuracy in a DEM, classification accuracy of land cover, quantitative measurement of crop health indices).
- Spatial Resolution: The ground sample distance (GSD) or point density achieved in the output product.
- Feature Identification Rate: The success rate of automatically identifying specific objects or conditions (e.g., disease in crops, structural defects).
- Data Processing Time: The computational time required to transform raw sensor data into actionable information.
- Signal-to-Noise Ratio: The clarity and quality of the sensor readings.
- Control Variables:
- Target Area: The specific geographic region or site being surveyed.
- Environmental Conditions: Consistent weather conditions (e.g., clear skies for optical sensors, consistent temperature for thermal).
- Drone Platform: The same drone model to ensure consistent stability and payload capacity.
- Ground Control Points (GCPs): The consistent number and accuracy of GCPs used for georeferencing.
The Role of Variables in Data-Driven Innovation
The systematic identification and manipulation of independent and dependent variables are more than just experimental formalities; they are the engine of data-driven innovation. By isolating specific factors and measuring their effects, developers can iteratively refine their technologies, making informed decisions based on empirical evidence. This approach facilitates:
- Reproducible Research: Clearly defined variables allow other researchers and developers to replicate experiments, verifying findings and building upon existing knowledge. This is crucial for establishing trust and accelerating progress in rapidly evolving fields.
- Systematic Problem Solving: When a system underperforms, knowing which variables influence which outcomes helps diagnose the root cause efficiently. For example, if an autonomous drone consistently drifts, varying control gains (IV) and measuring positional error (DV) can pinpoint an optimization target.
- Continuous Improvement: In an agile development environment, A/B testing different features or algorithm versions is a direct application of variable manipulation. An independent variable might be “Version A” vs. “Version B” of a user interface for a drone control app, with the dependent variable being user task completion time or error rate.
- Machine Learning Model Validation: In AI development, input features often serve as independent variables influencing the model’s prediction (dependent variable). Rigorous testing involves manipulating these inputs and measuring the model’s accuracy, robustness, and generalization capabilities.
Ultimately, the mastery of independent and dependent variables transforms mere tinkering into structured exploration, allowing tech innovators to move from intuition to insight, ensuring that every advancement is built on a foundation of sound scientific understanding. As autonomous systems become more complex and integrated into daily life, the precision afforded by a variable-based approach becomes not just an advantage, but a necessity for ensuring reliability, safety, and ethical development.