In the intricate world of flight technology, where precision, stability, and control are paramount, understanding fundamental mathematical concepts is as crucial as mastering advanced engineering principles. Among these foundational elements, the cross product stands out as an indispensable tool, enabling engineers and developers to design, analyze, and optimize the navigation, stabilization, and control systems that power everything from autonomous drones to sophisticated aircraft. Far from being an abstract mathematical curiosity, the cross product provides a powerful way to describe three-dimensional relationships, forces, and rotations—all essential components of modern flight dynamics.
The Fundamentals of Vector Operations
To grasp the significance of the cross product, one must first understand the concept of a vector. Unlike scalars, which only possess magnitude (like temperature or speed), vectors represent quantities with both magnitude and direction. In the context of flight, vectors are ubiquitous, describing everything from an aircraft’s velocity and acceleration to the forces exerted by its propellers and the magnetic field lines it navigates through.
Vector algebra provides a suite of operations to manipulate these directional quantities. While the dot product (or scalar product) yields a scalar value related to the extent to which two vectors point in the same direction, the cross product (or vector product) serves a distinct and equally vital purpose. When you take the cross product of two three-dimensional vectors, the result is another vector. This resulting vector possesses two defining characteristics: its magnitude and its direction.
Magnitude and Direction
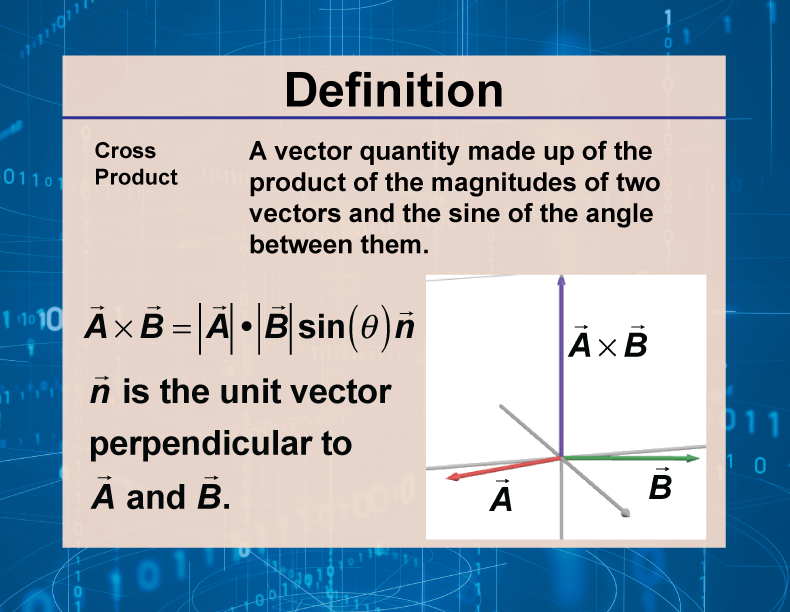
The magnitude of the cross product of two vectors, say A and B, is given by the formula:
|A × B| = |A| |B| sin(θ)
where |A| and |B| are the magnitudes of vectors A and B respectively, and θ is the angle between them (0° ≤ θ ≤ 180°). This formula reveals that the magnitude of the cross product is maximized when the vectors are perpendicular (θ = 90°, sin(θ) = 1) and zero when they are parallel or anti-parallel (θ = 0° or 180°, sin(θ) = 0). Geometrically, this magnitude can be interpreted as the area of the parallelogram formed by vectors A and B.
However, it is the direction of the resulting vector that often holds the most profound implications for flight technology. The vector A × B is always perpendicular to both vector A and vector B. To determine the exact orientation of this perpendicular vector, we employ the right-hand rule. If you point the fingers of your right hand in the direction of the first vector (A) and curl them towards the second vector (B), your thumb will point in the direction of their cross product (A × B). This convention is critical for consistently defining rotational axes and directions in 3D space.
Mathematical Representation
In a Cartesian coordinate system, if vector A = (Aₓ, Aᵧ, A₂) and vector B = (Bₓ, Bᵧ, B₂), their cross product A × B can be calculated using a determinant form:
A × B = (AᵧB₂ – A₂Bᵧ) i – (AₓB₂ – A₂Bₓ) j + (AₓBᵧ – AᵧBₓ) k
where i, j, and k are the unit vectors along the x, y, and z axes, respectively. This algebraic definition, while seemingly complex, provides the computational bedrock for flight control algorithms. Key properties of the cross product include its anti-commutativity (A × B = – B × A) and its distributive property, which are vital for algebraic manipulations in control theory.
Why the Cross Product Matters in Flight Technology
The 3D nature of flight necessitates a deep understanding of forces, moments, and rotations in all three dimensions. The cross product provides a direct mathematical link between these concepts, making it indispensable for accurately modeling, simulating, and controlling aerial vehicles.
Understanding Torque and Rotational Dynamics
Perhaps the most direct and crucial application of the cross product in flight technology is in calculating torque. Torque, often referred to as a moment, is the rotational equivalent of a linear force. It is what causes an object to rotate or changes its rotational motion. For drones and other aircraft, understanding and controlling torque is fundamental to achieving stability, executing maneuvers, and maintaining a desired orientation.

The formula for torque (τ) generated by a force (F) applied at a position vector (r) from the pivot point is given by:
τ = r × F
Consider a multirotor drone: each propeller generates a thrust force. By varying the speed of individual motors, the flight controller strategically alters these thrust forces, creating differential torques around the drone’s center of mass. For instance, to pitch the drone forward, the flight controller might increase the thrust of the rear motors and decrease that of the front motors, resulting in a net torque around the drone’s lateral axis. The cross product precisely calculates the magnitude and direction of this resulting torque, allowing the control system to make the necessary adjustments. Similarly, the concept extends to fixed-wing aircraft, where control surfaces like ailerons, elevators, and rudders generate aerodynamic forces at specific distances from the aircraft’s center of gravity, producing torques that control roll, pitch, and yaw.
Orientation and Attitude Control
Maintaining a stable and desired orientation (attitude) is a cornerstone of modern flight. Drones, for example, rely on sophisticated Inertial Measurement Units (IMUs), which typically comprise accelerometers, gyroscopes, and sometimes magnetometers. These sensors provide raw data about the drone’s angular velocity, linear acceleration, and magnetic field exposure.
The cross product plays a pivotal role in the sensor fusion algorithms (such as Kalman filters, Mahony filters, or Madgwick filters) that combine this raw sensor data to accurately estimate the drone’s current orientation in 3D space. For instance, the cross product can be used to:
- Calculate the axis of rotation: If a gyroscope measures an angular velocity vector and an accelerometer provides a gravity vector (after removing linear acceleration components), their cross product can help define the error in orientation and correct it.
- Align reference frames: When integrating magnetometer data, the cross product can help determine the deviation of the vehicle’s body frame from a global magnetic north reference, aiding in heading estimation.
- Correct drift: Gyroscopes drift over time. By using the cross product between the measured gravity vector (from accelerometers) and the expected gravity vector (from the current attitude estimate), a corrective angular velocity can be generated to counteract this drift, ensuring a stable and accurate attitude estimation.
Practical Implications for Drone Stabilization Systems
The heart of any modern drone or aerial vehicle is its flight controller, which continuously processes sensor data and issues commands to motors or control surfaces to maintain stability and execute desired maneuvers. The cross product is deeply embedded within these control loops.
Flight controllers often use Proportional-Integral-Derivative (PID) control mechanisms. While the PID terms themselves operate on error signals (e.g., the difference between desired and current roll angle), the calculation of these error signals, particularly in a 3D context, frequently leverages vector math. For instance, an angular error might be represented as a small rotation vector whose direction is determined by the cross product of the current and desired orientation vectors. The magnitude of this error vector directly feeds into the PID controller, which then calculates the necessary corrective torques. The cross product is then used again to translate these desired torques into specific motor speed adjustments or control surface deflections.
Beyond Basic Flight: Advanced Applications
The utility of the cross product extends far beyond the foundational aspects of flight, permeating more advanced areas of drone technology.
Sensor Fusion and Calibration
Advanced sensor fusion algorithms often involve calculating transformations between different sensor frames and the vehicle’s body frame. The cross product assists in determining the precise alignment of sensor axes during calibration. For magnetometers, for example, accurate compass readings require knowing the magnetic field vector relative to the drone’s orientation. The cross product can be instrumental in calculating the component of the magnetic field perpendicular to a plane, helping to filter out tilt errors and provide a robust heading. It also plays a role in identifying and correcting misalignments between accelerometers and gyroscopes.
Robotic Arm Control and Gimbal Stabilization
For drones equipped with robotic arms or advanced camera gimbals, the principles of rotational dynamics, heavily reliant on the cross product, become critical for precise articulation and stabilization. A gimbal’s stabilization system uses gyroscopes and accelerometers to detect unwanted movements. It then calculates the necessary corrective torques to counteract these movements and keep the mounted camera perfectly steady, often involving cross product calculations to determine the required force vectors for the gimbal motors. The cross product defines the axes of rotation and the forces needed to maintain a specific orientation, ensuring smooth footage even in turbulent conditions.

Trajectory Planning and Predictive Control
In autonomous flight and complex trajectory planning, drones must often predict their future state and adjust their control inputs accordingly. Physics-based models used in predictive control often incorporate the cross product to define angular momentum, rotational inertia, and the effects of external forces (like wind shear) on the drone’s orientation and path. By understanding the torques and angular velocities predicted by these models, the flight controller can make proactive adjustments, enabling smoother, more efficient, and safer autonomous operations.
In essence, the cross product is not merely a mathematical curiosity but a fundamental language through which the complex dance of forces, rotations, and orientations in 3D space is articulated. Its applications are woven into the very fabric of flight technology, empowering the sophisticated navigation, stabilization, and control systems that define modern aerial vehicles.