The rapid advancement of drone technology, particularly in areas like autonomous flight, AI-powered object recognition, intricate mapping, and sophisticated remote sensing, is fundamentally underpinned by robust and intelligently structured software. At the heart of developing such complex systems in Python lies a special method: __init__. This method is not merely a technical detail; it is the cornerstone for creating predictable, maintainable, and scalable drone applications that drive innovation.
In the context of “Tech & Innovation,” where drones are evolving from simple remote-controlled aircraft into highly intelligent, autonomous agents, understanding __init__ is crucial for engineers and developers. It provides the mechanism to properly set up new objects—whether they represent a flight controller, a sensor data processor, an AI tracking module, or an autonomous navigation system—ensuring they are ready to perform their designated tasks from the moment they are created.

The Core of Object Initialization in Drone Software
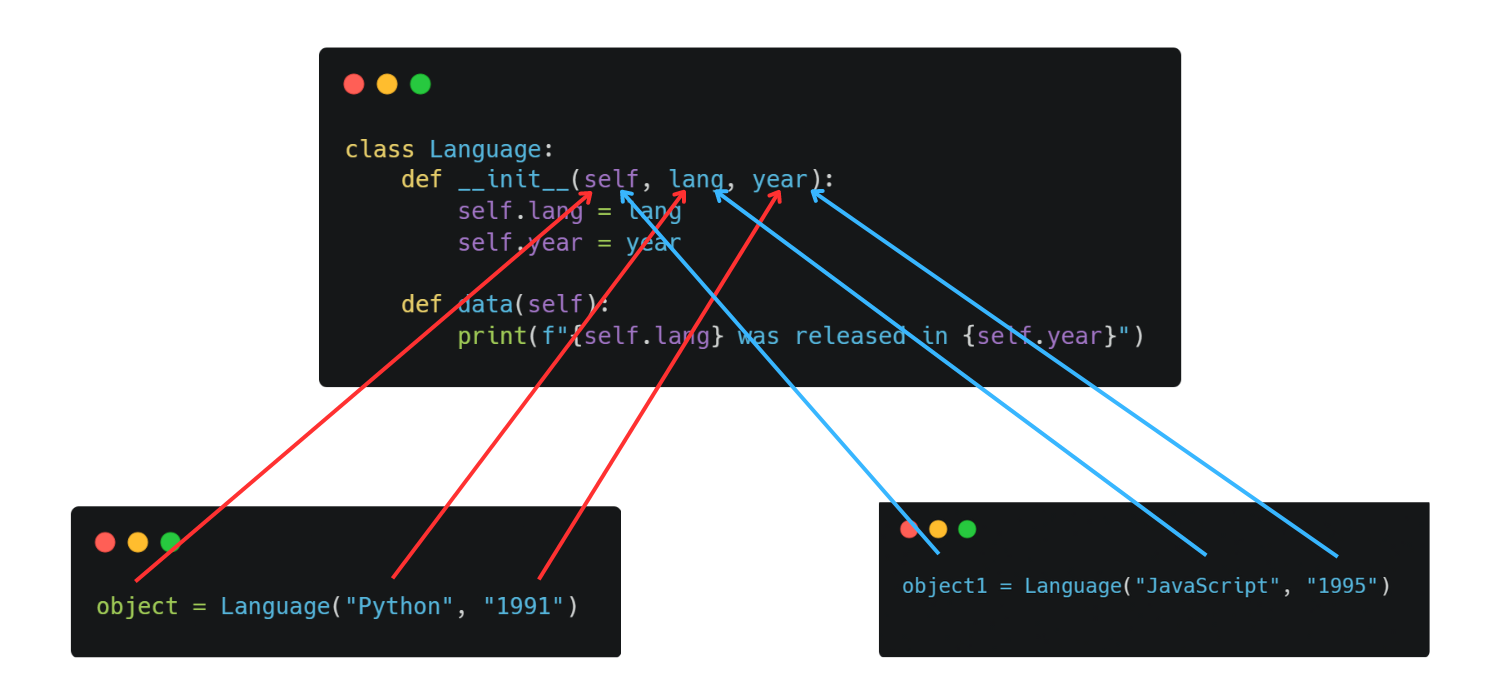
At its essence, __init__ is a constructor method in Python classes. When you create a new instance (an object) of a class, __init__ is automatically called. Its primary purpose is to initialize the attributes of the newly created object, giving it an initial state. Without proper initialization, an object might lack essential data or configurations, leading to unpredictable behavior or errors in mission-critical drone operations.
Consider a class designed to represent a drone’s core flight parameters. When a FlightController object is instantiated, it needs to know its initial GPS coordinates, battery level, current flight mode, and perhaps the status of its IMU (Inertial Measurement Unit) sensors. __init__ is where these crucial starting conditions are established.
class FlightController:
def __init__(self, initial_latitude, initial_longitude, initial_altitude, battery_level=100, flight_mode="standby"):
self.latitude = initial_latitude
self.longitude = initial_longitude
self.altitude = initial_altitude
self.battery_level = battery_level
self.flight_mode = flight_mode
self.imu_status = "calibrated" # Assume calibrated on startup
print(f"FlightController initialized at {self.latitude}, {self.longitude}, {self.altitude} with {self.battery_level}% battery.")
# Creating an instance of the FlightController
drone_controller = FlightController(34.0522, -118.2437, 10)
# Output: FlightController initialized at 34.0522, -118.2437, 10 with 100% battery.
# Accessing attributes
print(f"Current flight mode: {drone_controller.flight_mode}")
In this example, __init__ takes several parameters that define the drone’s initial state. The self parameter is a convention that refers to the instance of the class itself, allowing __init__ to set attributes specifically for that object (e.g., self.latitude). This mechanism ensures that every FlightController object is born with a defined identity and operational context, critical for deterministic behavior in autonomous systems.
Ensuring State Consistency
One of the most significant advantages __init__ offers in complex drone software is ensuring state consistency. Without __init__, you might have to manually set each attribute after creating an object, which is error-prone and can lead to objects being used in an uninitialized or partially initialized state. This could result in a drone attempting a mission without crucial navigation data or an AI module trying to process images before its model is loaded. __init__ enforces that all necessary initializations occur at the point of object creation, guaranteeing a valid starting state.
Constructing Intelligent Flight Systems
For advanced drone capabilities such as autonomous navigation, obstacle avoidance, and AI-driven flight paths, __init__ plays a pivotal role in setting up the underlying systems. These systems often involve multiple interconnected modules, each represented by a class.
Initializing Navigation and Sensor Fusion Modules
Consider an AutonomousNavigationSystem class. Its __init__ method might be responsible for:
- Loading pre-planned mission routes: Defining the sequence of waypoints the drone must follow.
- Connecting to sensor interfaces: Establishing communication with GPS, IMU, barometer, and lidar sensors.
- Setting up kalman filters or other sensor fusion algorithms: Preparing the mathematical models that combine data from various sensors to provide a more accurate estimate of the drone’s position and orientation.
import numpy as np
class SensorDataProcessor:
def __init__(self):
self.gps_data = None
self.imu_data = None
self.barometer_data = None
self.fusion_matrix = np.eye(3) # Placeholder for sensor fusion matrix
print("SensorDataProcessor ready for data input.")
def process_data(self, gps, imu, barometer):
# Simulate sensor fusion logic
fused_data = (np.array(gps) + np.array(imu) + np.array(barometer)) @ self.fusion_matrix
return fused_data
class AutonomousNavigationSystem:
def __init__(self, mission_plan_file, initial_position_lat, initial_position_lon):
self.mission_plan = self._load_mission_plan(mission_plan_file)
self.current_waypoint_index = 0
self.current_position = (initial_position_lat, initial_position_lon)
self.sensor_processor = SensorDataProcessor() # Initialize a sub-component
print(f"AutonomousNavigationSystem initialized. Mission loaded: {len(self.mission_plan)} waypoints.")
def _load_mission_plan(self, filename):
# In a real scenario, this would parse a file (e.g., KML, JSON)
print(f"Loading mission plan from {filename}...")
return [(34.05, -118.25), (34.06, -118.26), (34.07, -118.27)] # Example waypoints
# Setup the navigation for a drone
drone_nav_system = AutonomousNavigationSystem("mission_a.json", 34.0522, -118.2437)
# The sensor processor is also initialized as part of the navigation system
print(f"Sensor processor status: {drone_nav_system.sensor_processor.fusion_matrix.shape}")
Here, __init__ not only sets up the AutonomousNavigationSystem‘s direct attributes but also instantiates and configures a SensorDataProcessor object as a component. This demonstrates how __init__ facilitates the composition of complex systems from smaller, manageable parts, a key principle in scalable software architecture for drones.
Configuring AI-Powered Modules
For AI features like “AI Follow Mode” or intelligent object detection for search and rescue, __init__ is indispensable for preparing the artificial intelligence models and related components.
import os
class AIObjectDetector:
def __init__(self, model_path="ai_models/drone_detector.h5", confidence_threshold=0.7):
if not os.path.exists(model_path):
raise FileNotFoundError(f"AI model not found at {model_path}")
self.model = self._load_ai_model(model_path) # Load a pre-trained ML model
self.confidence_threshold = confidence_threshold
self.detected_objects = []
print(f"AIObjectDetector initialized with model from {model_path}. Confidence threshold: {confidence_threshold}")
<p style="text-align:center;"><img class="center-image" src="https://i.sstatic.net/iOJI9.png" alt=""></p>
def _load_ai_model(self, path):
# This would typically use TensorFlow, PyTorch, or OpenCV to load a deep learning model
print(f"Loading AI model from {path}...")
return f"Simulated_Model_for_{os.path.basename(path)}" # Placeholder for a loaded model
def detect(self, image_frame):
# Simulate detection logic
if "person" in image_frame.lower():
self.detected_objects.append({"type": "person", "confidence": 0.95})
print("Person detected!")
else:
print("No significant objects detected.")
return self.detected_objects
# Initialize an AI module for a surveillance drone
surveillance_detector = AIObjectDetector(model_path="ai_models/surveillance_detector.h5", confidence_threshold=0.8)
# Now it's ready to process frames
surveillance_detector.detect("image_with_person.jpg")
In this AI example, __init__ handles the critical task of loading a machine learning model, which can be a time-consuming and resource-intensive operation. By performing this in __init__, the AIObjectDetector is fully prepared to start detecting objects as soon as it is created, preventing runtime errors that could arise from an uninitialized model. It also sets default parameters like confidence_threshold, which can be overridden, offering flexibility.
Architecting Data Processing for Advanced Sensors
Drones equipped with advanced sensors for mapping, remote sensing, and environmental monitoring generate vast amounts of data. Efficiently processing this data requires well-organized software components, where __init__ plays a vital role in setting up data structures, communication protocols, and initial processing pipelines.
Configuring Mapping and Remote Sensing Processors
A class designed to process data from a LiDAR sensor for 3D mapping or a multispectral camera for agricultural analysis needs its __init__ method to establish the necessary initial conditions. This might include:
- Initializing data buffers: Creating arrays or lists to temporarily store incoming sensor readings.
- Setting up communication with data acquisition hardware: Configuring serial ports or network connections to receive data streams.
- Loading calibration files: Applying sensor-specific calibration parameters to ensure accurate measurements.
- Defining projection systems: Setting up geographic coordinate systems for mapping applications.
import collections
class LidarProcessor:
def __init__(self, sensor_port="/dev/ttyUSB0", baud_rate=115200, calibration_file="lidar_cal.json", max_buffer_size=10000):
self.sensor_port = sensor_port
self.baud_rate = baud_rate
self.calibration_data = self._load_calibration(calibration_file)
self.point_cloud_buffer = collections.deque(maxlen=max_buffer_size)
self.is_connected = False
self._establish_connection()
print(f"LidarProcessor initialized for port {self.sensor_port}. Connected: {self.is_connected}")
def _load_calibration(self, filename):
# In a real application, this would parse a JSON or YAML file
print(f"Loading LiDAR calibration from {filename}...")
return {"offset_x": 0.05, "offset_y": -0.02, "angle_correction": 0.01}
def _establish_connection(self):
# Simulate connection to the sensor
print(f"Attempting to connect to LiDAR sensor on {self.sensor_port}...")
self.is_connected = True # In a real scenario, this would involve actual hardware communication
def receive_data_point(self, x, y, z):
calibrated_x = x + self.calibration_data["offset_x"]
self.point_cloud_buffer.append((calibrated_x, y, z))
if len(self.point_cloud_buffer) >= self.point_cloud_buffer.maxlen:
print("Lidar buffer full, oldest points discarded.")
# Create a LiDAR processor for a mapping drone
mapping_lidar = LidarProcessor(sensor_port="/dev/lidar_port_1", calibration_file="mapping_lidar_cal.json")
# Simulate receiving data
mapping_lidar.receive_data_point(10.1, 5.2, 1.3)
mapping_lidar.receive_data_point(10.2, 5.3, 1.4)
print(f"Points in buffer: {len(mapping_lidar.point_cloud_buffer)}")
Here, __init__ ensures that the LidarProcessor is not just created but is also immediately configured to communicate with its sensor, apply necessary calibrations, and manage its data buffer. This readiness from the moment of instantiation is critical for real-time data acquisition and processing, which is often required in dynamic drone operations like terrain mapping or precision agriculture.
Enhancing Modularity and Scalability in Drone Innovation
The robust use of __init__ naturally leads to more modular and scalable drone software architectures. By enforcing clear initialization patterns, developers can create classes that are independent and self-contained, yet easily integrated into larger systems.
Fostering Reusability
Well-defined __init__ methods make classes highly reusable. A BatteryManager class, for instance, could be initialized with different battery capacities or monitoring thresholds, allowing it to be reused across various drone models or mission types without modification. This reusability accelerates development for new drone features and reduces the likelihood of introducing bugs.
class BatteryManager:
def __init__(self, total_capacity_mah, warning_threshold_percent=20):
self.total_capacity_mah = total_capacity_mah
self.current_charge_mah = total_capacity_mah # Assume full charge initially
self.warning_threshold_percent = warning_threshold_percent
self.voltage = 0.0 # Placeholder
self.current = 0.0 # Placeholder
print(f"BatteryManager initialized with {total_capacity_mah} mAh capacity.")
def update_charge(self, charge_consumed_mah):
self.current_charge_mah -= charge_consumed_mah
if self.get_charge_percent() <= self.warning_threshold_percent:
print(f"WARNING: Battery charge critical! {self.get_charge_percent()}% remaining.")
def get_charge_percent(self):
return (self.current_charge_mah / self.total_capacity_mah) * 100
# For a heavy-lift drone
heavy_drone_battery = BatteryManager(total_capacity_mah=25000, warning_threshold_percent=15)
heavy_drone_battery.update_charge(5000)
print(f"Heavy-lift drone battery remaining: {heavy_drone_battery.get_charge_percent():.2f}%")
# For a micro-drone
micro_drone_battery = BatteryManager(total_capacity_mah=1000, warning_threshold_percent=30)
micro_drone_battery.update_charge(750)
print(f"Micro-drone battery remaining: {micro_drone_battery.get_charge_percent():.2f}%")
The BatteryManager class showcases how __init__ enables a single class definition to serve different use cases by simply passing different initial parameters, a cornerstone of flexible and maintainable software for a diverse drone ecosystem.
Facilitating Team Collaboration
In large-scale drone development projects, multiple engineers might work on different sub-systems (e.g., flight control, payload management, ground station communication). By adhering to clear __init__ definitions, each team can understand exactly what parameters are required to create and integrate an object from another team’s module. This clarity minimizes integration headaches and promotes smoother collaboration, essential for accelerating innovation in a rapidly evolving field.
In conclusion, __init__ in Python is far more than just a method; it is a fundamental architectural tool for building robust, intelligent, and scalable drone applications. From initializing the core state of a flight controller to setting up complex AI models and managing sensor data pipelines, __init__ ensures that every component of an innovative drone system is properly prepared and ready for action, driving forward the possibilities of autonomous flight and aerial intelligence.