In an increasingly interconnected world driven by real-time data and autonomous systems, the precise synchronization of time across devices and networks is not merely a convenience—it is a foundational requirement for operational integrity, data accuracy, and reliable decision-making. At the heart of this critical synchronization lies the Network Time Protocol (NTP), a robust and venerable internet protocol designed to distribute accurate time stamps across a network. An NTP server is a dedicated network device or a software service running on a server that acts as a reference point, providing synchronized Coordinated Universal Time (UTC) to client devices.
From sophisticated autonomous drones executing complex flight paths to AI models processing vast streams of sensor data for mapping and remote sensing, the underlying fabric of modern technology relies heavily on a synchronized sense of time. Without it, distributed systems would struggle to correlate events, sensor readings would lack precise context, and autonomous operations could face critical errors due to misaligned data. Understanding NTP servers is thus key to appreciating the invisible infrastructure that powers many of the most exciting advancements in tech and innovation.
The Core Mechanism of Network Time Protocol
The Network Time Protocol (NTP) is one of the oldest internet protocols still in use, developed by David L. Mills at the University of Delaware. Its primary goal is to synchronize the clocks of computer systems over a network to within a few milliseconds of UTC. It achieves this with remarkable precision and resilience, even over networks with varying latency.
How NTP Achieves Precision
NTP employs a sophisticated algorithm to account for network latency and clock drift. When an NTP client sends a request to an NTP server, it records four timestamps:
- T1: The client’s local time when the request leaves.
- T2: The server’s local time when the request arrives.
- T3: The server’s local time when the response leaves.
- T4: The client’s local time when the response arrives.
Using these four timestamps, the client can calculate both the network delay (round-trip time) and the clock offset between its own clock and the server’s clock. The offset is calculated as ((T2 - T1) + (T3 - T4)) / 2, and the delay as (T4 - T1) - (T3 - T2). By continuously exchanging these packets and applying filters, NTP can intelligently discard unreliable samples and gradually adjust the client’s clock, either speeding it up or slowing it down slightly, rather than making abrupt jumps. This gradual adjustment (known as “slewing”) ensures system stability and avoids potential issues with time-sensitive applications.
Hierarchical Structure and Stratum Levels
NTP operates on a hierarchical system of “strata,” which defines the distance from a reference clock. This stratum level helps to manage the reliability and accuracy of time sources.
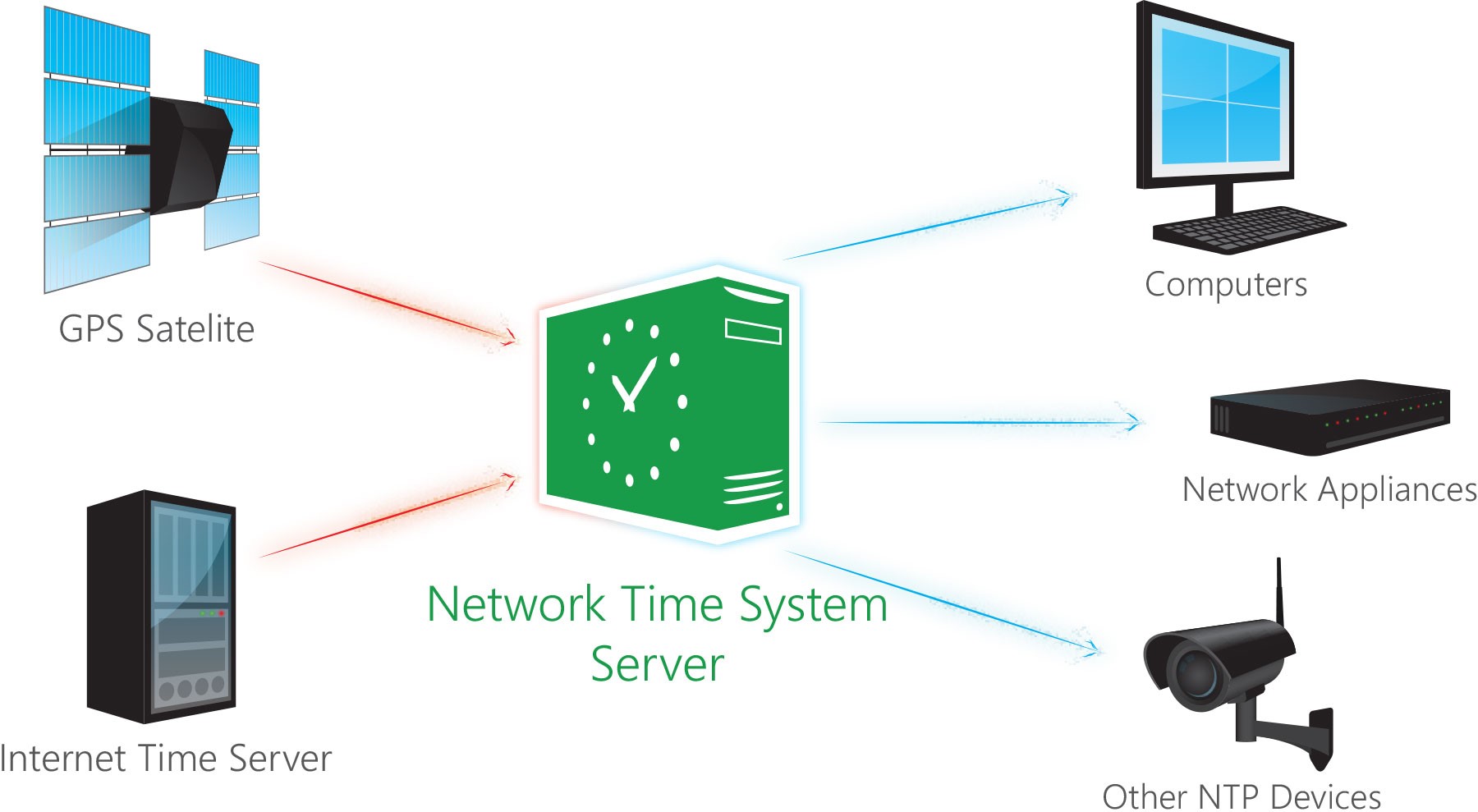
- Stratum 0: These are highly precise timekeeping devices, such as atomic clocks (cesium, rubidium) or GPS receivers, which are typically accurate to within nanoseconds. They are not directly connected to the network but rather serve as the primary source for stratum 1 servers.
- Stratum 1: These are NTP servers directly synchronized to Stratum 0 devices. They are highly accurate and serve as the primary time source for other NTP servers and clients.
- Stratum 2: These servers are synchronized to Stratum 1 servers. They serve as clients to Stratum 1 servers and can also act as servers for Stratum 3 clients. Most client devices will synchronize with Stratum 2 or 3 servers.
- Stratum 3 and higher: These servers are synchronized to Strat2 servers and so on, forming a tree-like structure. The higher the stratum number, the further away (and potentially less accurate, though still highly precise) the server is from the primary time source.
This hierarchical model ensures redundancy and robustness. If a higher-stratum server becomes unavailable, clients can automatically failover to another synchronized server, maintaining continuous and accurate timekeeping.
Why Accurate Time Matters in Modern Tech & Innovation
The foundational importance of accurate time synchronization extends far beyond simply knowing the correct hour. In the realm of advanced technology, especially concerning distributed systems, real-time data processing, and autonomous operations, precisely synchronized clocks are indispensable.
Data Integrity and Correlation
In systems where data is collected from multiple sensors or processed by various components, accurate timestamps are critical for correlating events. Imagine a drone equipped with a high-resolution camera, a LiDAR scanner, and an Inertial Measurement Unit (IMU). Each sensor generates data streams that, when combined, provide a rich, multi-dimensional view of the environment. If the clocks on these individual sensors or their processing units are out of sync, even by a few milliseconds, the data fusion process can lead to significant errors. An image taken at one specific time might be incorrectly associated with a LiDAR scan from a slightly different moment, leading to misaligned point clouds or inaccurate object recognition. For mapping, remote sensing, and 3D model generation, such discrepancies are unacceptable.
System Synchronization in Distributed Architectures

Modern technological systems, particularly those powering sophisticated drones and their ground control stations, are often distributed. This means different parts of the system—onboard flight controllers, payload computers, edge computing units, ground station software, and cloud-based analytics platforms—might be physically separate but logically interconnected. For these components to work together seamlessly, whether coordinating actions, sharing telemetry, or executing commands, they must operate on a common time reference. NTP ensures that logs from different system parts can be accurately sequenced for debugging, that control signals are applied precisely when intended, and that data received from various sources can be processed in the correct temporal order. This is particularly vital for safety-critical systems and those involving complex multi-agent interactions, like drone swarms.
NTP’s Indispensable Role in Advanced Drone Applications
The innovative applications emerging from drone technology—autonomous navigation, detailed mapping, sophisticated remote sensing, and AI-driven operations—all hinge on a robust foundation of synchronized time provided by NTP or similar precise time sources (like GPS-disciplined clocks, which often feed NTP servers).
Autonomous Navigation and Sensor Fusion
Autonomous drones rely heavily on real-time sensor fusion to understand their environment, localize themselves, and plan their paths. This involves merging data from GPS, IMUs (accelerometers, gyroscopes, magnetometers), altimeters, LiDAR, radar, and vision cameras. Each of these sensors produces time-stamped readings. For the drone’s flight controller and onboard computing systems to accurately fuse this disparate data into a coherent and reliable model of the world, all sensor inputs must be precisely synchronized. An NTP server, or a GPS-based time source feeding local NTP processes, ensures that the timestamps assigned to each sensor reading are consistent, enabling algorithms to correctly associate a visual feature with a LiDAR point cloud and the drone’s precise attitude and position at that exact moment. Without this synchronization, the drone’s perception of its surroundings would be skewed, leading to navigation errors, inefficient path planning, or even collisions.
Mapping, Remote Sensing, and Geospatial Accuracy
For applications like photogrammetry, 3D mapping, agricultural monitoring, and environmental surveying, the accuracy of the geospatial data is paramount. When a drone collects imagery or LiDAR data, each data point must be precisely geotagged with its spatial coordinates and, crucially, its exact time of capture. NTP ensures that the internal clock of the drone’s imaging system, LiDAR unit, and GPS receiver are all in perfect harmony. This precision allows for the accurate reconstruction of 3D models, the creation of highly detailed orthomosaics, and the reliable tracking of changes over time. In multi-drone mapping missions, where several UAVs work collaboratively to cover a large area, NTP synchronization across the entire fleet is essential for stitching together the collective data seamlessly and without temporal discontinuities. For remote sensing applications, comparing datasets collected at different times requires that each dataset’s timestamps are accurate and universally consistent.
AI-Driven Operations and Real-time Decision Making
Many cutting-edge drone applications incorporate artificial intelligence for tasks such as object recognition, predictive analytics, AI follow mode, and intelligent anomaly detection. These AI models often operate on continuous streams of real-time data. For an AI system to accurately interpret sensor inputs and make timely, correct decisions (e.g., identifying a person to follow, detecting a structural defect, or avoiding a dynamic obstacle), it must process data that is not only current but also precisely time-aligned. If the video feed, thermal imagery, or radar data are not perfectly synchronized, the AI’s perception of the world becomes desynchronized, potentially leading to delayed reactions, incorrect classifications, or erroneous autonomous actions. NTP provides the critical underpinning for ensuring that the temporal context of all inputs to the AI is consistent, enabling robust and reliable real-time decision-making.
Implementing and Managing NTP for Robust Systems
For tech innovators and operators leveraging advanced drone technology, the thoughtful implementation and management of NTP is a non-negotiable aspect of system design.
Internal vs. External NTP Sources
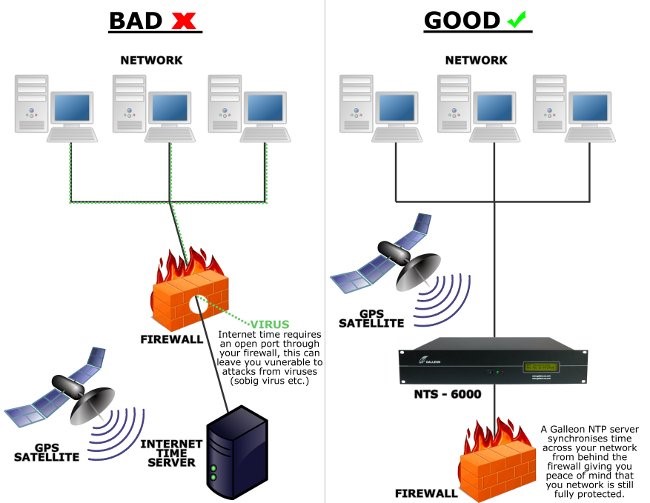
Organizations can leverage both external and internal NTP sources. External NTP servers, typically public ones or those provided by internet service providers, offer a convenient way to synchronize clocks to global UTC. However, for highly critical systems or those operating in environments with limited internet connectivity (like remote drone deployments), internal NTP servers are often preferred. An internal NTP server can be synchronized to external sources but then provides time to all internal network devices, offering greater control, reduced latency, and enhanced security. Crucially, internal NTP servers can be disciplined by high-precision GPS receivers, effectively bringing a Stratum 0/1 reference source directly into the local network, guaranteeing microsecond-level accuracy even offline.
Security Considerations
While often overlooked, NTP security is vital. Unsecured NTP servers can be vulnerable to abuse, such as DDoS amplification attacks. More importantly for drone operations, compromised NTP servers could feed incorrect time to autonomous systems, potentially leading to chaotic or dangerous behavior. Best practices include:
- Access Control: Restricting access to NTP servers to authorized clients.
- Authentication: Using NTPv4’s authentication mechanisms (e.g., symmetric key or Autokey) to verify the identity of NTP peers.
- Monitoring: Regularly monitoring NTP server health and synchronization status.
- Firewall Rules: Implementing strict firewall rules to allow NTP traffic only from trusted sources.
By understanding and strategically implementing NTP, developers and operators can ensure the temporal integrity of their advanced drone systems, unlocking their full potential for precision, autonomy, and innovation across diverse applications.