In the dynamic world of Tech & Innovation, particularly within the burgeoning field of unmanned aerial systems (UAS), the ability to manage vast quantities of data efficiently and reliably is paramount. From autonomous flight logs and real-time sensor streams to intricate mapping projects and AI-driven predictive maintenance, every piece of information contributes to the intelligence and efficacy of drone operations. This is where database normalization becomes not just a best practice, but a critical foundation for scalable and robust systems. Normalization is a systematic approach to organizing the fields and tables of a relational database to minimize data redundancy and improve data integrity. It’s about designing databases that are accurate, consistent, and easy to maintain, which is indispensable for applications ranging from remote sensing data processing to AI model training for drone navigation.
The Imperative of Structured Data for Drone Tech
Modern drone applications generate an unprecedented volume of diverse data. A single autonomous mapping mission might produce gigabytes of high-resolution imagery, LiDAR point clouds, GPS coordinates, altitude readings, battery consumption metrics, and flight controller telemetry. An AI-powered drone fleet management system relies on historical flight data, sensor calibration records, maintenance schedules, and pilot certifications. Without a meticulously structured approach to storing this information, insights become elusive, errors proliferate, and system performance degrades. Normalization addresses these challenges by breaking down large, complex tables into smaller, more manageable ones, linked by defined relationships. This reduces storage requirements, enhances update efficiency, and ensures that data remains consistent across the entire ecosystem. For innovative drone solutions, where precision and reliability are non-negotiable, a well-normalized database is the backbone of operational excellence and technological advancement.
The Pillars of Normalization: Forms Explained
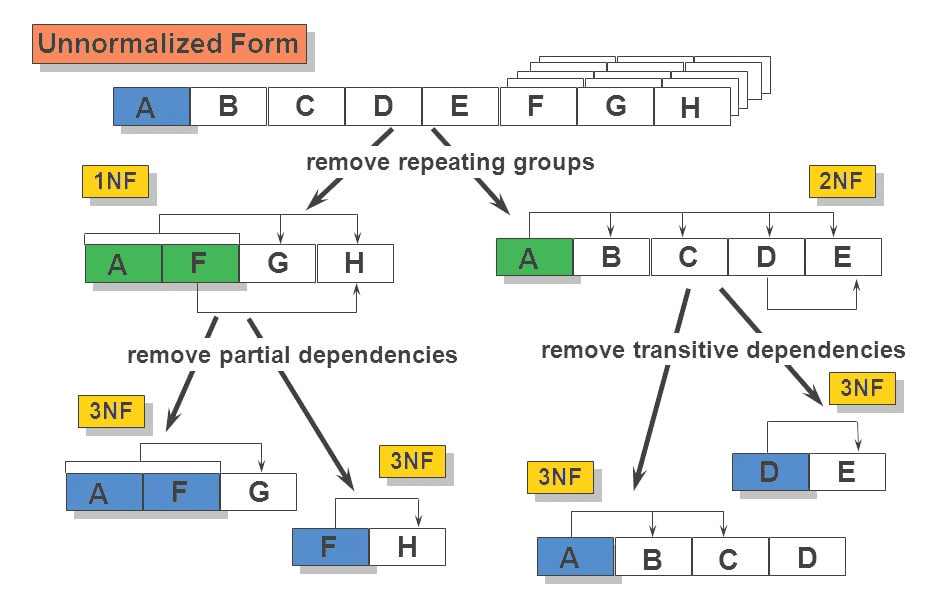
Normalization proceeds through a series of “normal forms,” each addressing specific types of data redundancy and integrity issues. The most commonly applied forms are the First (1NF), Second (2NF), and Third (3NF) Normal Forms, with Boyce-Codd Normal Form (BCNF) offering an even stricter level of integrity. Understanding these forms is crucial for database architects designing systems for drone data management, remote sensing analytics, or autonomous decision-making engines.
First Normal Form (1NF)
To achieve First Normal Form, a table must satisfy three primary conditions:
- Atomic Values: Each column must contain atomic (indivisible) values. This means no multi-valued attributes in a single cell. For instance, in a
FlightLogtable, instead of having a single columnGPS_Coordinatesstoring “34.0522 N, 118.2437 W”, separate columns forLatitudeandLongitudeshould be used. Similarly, a list ofPayloadSensorslike “RGB Camera, Thermal Camera” in one cell should be split, perhaps into a separate table linkingFlightIDtoSensorID. - Unique Rows: Each row must be unique, meaning there’s a primary key that uniquely identifies each record. For a table storing
DroneMaintenanceRecords,MaintenanceIDcould serve as the primary key, ensuring each maintenance event is distinct. - No Repeating Groups: There should be no repeating groups of columns. For example, a
MissionPlantable should not haveWaypoint1_Lat,Waypoint1_Lon,Waypoint2_Lat,Waypoint2_Lon, etc. Instead, a separateMissionWaypointstable linked toMissionPlanviaMissionIDwould store individual waypoints.
In the context of drone telemetry, achieving 1NF means each sensor reading (e.g., temperature, battery voltage, motor RPM) is stored in its own distinct column, for a specific timestamp and drone ID, ensuring that every piece of data is granular and individually addressable. This atomic approach facilitates accurate historical analysis and real-time monitoring critical for autonomous flight systems.
Second Normal Form (2NF)
A table is in Second Normal Form if it is already in 1NF and all non-key attributes are fully functionally dependent on the primary key. This applies only to tables with composite primary keys (keys made up of two or more columns). If a table has a single-column primary key, it is automatically in 2NF if it’s in 1NF. The goal of 2NF is to eliminate partial dependencies.
Consider a DroneSensorReadings table with a composite primary key (DroneID, Timestamp). If this table also included DroneModel and DroneManufacturer (which depend only on DroneID, not Timestamp), these would be partial dependencies. To normalize this:
- Create a separate
Dronestable (DroneIDPK,DroneModel,DroneManufacturer). - The original
DroneSensorReadingstable would then only contain (DroneID,TimestampPK,Temperature,Humidity,BatteryLevel, etc.).
This separation ensures that information about the drone itself (model, manufacturer) is stored only once in the Drones table, preventing redundancy every time a new sensor reading is recorded. For autonomous systems, this improves data consistency and reduces the risk of conflicting drone specifications across numerous log entries.
Third Normal Form (3NF)
A table is in Third Normal Form if it is in 2NF and all non-key attributes are non-transitively dependent on the primary key. This means no non-key attribute should depend on another non-key attribute. 3NF primarily aims to eliminate transitive dependencies.
Imagine a MappingProjectDetails table that includes ProjectID (PK), ClientName, ClientAddress, and ClientContactEmail. Here, ClientAddress and ClientContactEmail are dependent on ClientName, which is itself dependent on ProjectID. This is a transitive dependency (ProjectID -> ClientName -> ClientAddress).
To achieve 3NF:
- Create a separate
Clientstable (ClientIDPK,ClientName,ClientAddress,ClientContactEmail). - The
MappingProjectDetailstable would then containProjectID(PK),ClientID(FK), and other project-specific details.
This structure ensures that client details are stored only once, even if they are associated with multiple mapping projects. For large-scale remote sensing and geospatial data services, 3NF ensures that updates to client information only need to occur in one place, greatly reducing the potential for data inconsistencies and improving the overall integrity of the business and project management data.
Boyce-Codd Normal Form (BCNF)
BCNF is a stricter version of 3NF. A table is in BCNF if and only if every determinant is a candidate key. A determinant is any attribute or set of attributes that determines another attribute. In simpler terms, BCNF addresses certain anomalies that 3NF might miss, particularly when a table has multiple overlapping candidate keys.
While 3NF is sufficient for most business applications, BCNF is preferred in complex data environments where data integrity is paramount, such as in highly critical drone traffic management systems or AI training datasets where every data point’s accuracy is vital. It eliminates the remaining trivial dependencies, ensuring the highest level of data fidelity and minimizing all forms of redundancy that could lead to update, insertion, or deletion anomalies.

The Strategic Advantage of Normalization in Tech & Innovation
For organizations leveraging drones for mapping, inspection, logistics, or developing advanced AI and autonomous capabilities, normalization offers significant strategic advantages:
- Data Integrity and Accuracy: By minimizing redundancy, normalization ensures that data changes are made in a single, consistent location. This is crucial for drone systems where erroneous sensor readings or mission parameters could lead to significant operational failures or incorrect AI model training.
- Reduced Data Redundancy: Storing information only once saves disk space and reduces the likelihood of inconsistencies. For large-scale remote sensing datasets or extensive flight logs, this translates to considerable cost savings and improved query performance.
- Enhanced Data Consistency: When data is well-normalized, the system becomes more predictable. For autonomous drones making real-time decisions, consistent access to accurate data, whether it’s geographical information or hardware diagnostics, is non-negotiable.
- Improved Maintainability and Scalability: A normalized database is easier to modify and extend without disrupting existing data structures. As drone technology evolves and new sensors, payloads, or operational procedures are introduced, a flexible database schema can adapt quickly, supporting continuous innovation.
- Optimized Query Performance: While extreme normalization can sometimes lead to more complex joins and slower queries for specific use cases (which can be addressed through denormalization for reporting or analytical purposes), a balanced normalization typically leads to faster and more efficient data retrieval by reducing the amount of data that needs to be processed. This is vital for AI systems that require rapid access to training data or for real-time analytics dashboards monitoring drone fleet health.
In the realm of Tech & Innovation, where the complexity and volume of data continue to grow exponentially, adopting robust database normalization practices is not merely a technical detail; it is a fundamental requirement for building resilient, intelligent, and scalable drone systems that can effectively manage the future of aerial autonomy.