The Enduring Loop: Understanding while True in Python for Tech & Innovation
In the dynamic world of technological innovation, particularly within the realm of autonomous systems like drones, the concept of continuous operation is paramount. Many critical functions—from real-time sensor processing to maintaining stable flight—demand an uninterrupted execution cycle. This is where the while True construct in Python emerges as a fundamental building block. Far from being a mere programming curiosity, while True represents an infinite loop, a directive to a program to execute a block of code repeatedly, indefinitely, until explicitly told to stop. Its significance in designing robust, responsive, and persistent systems, especially those driving the intelligence behind modern drones, cannot be overstated. It is the heartbeat of many applications that require constant vigilance, continuous data intake, or perpetual processing.
The Core Mechanism of while True
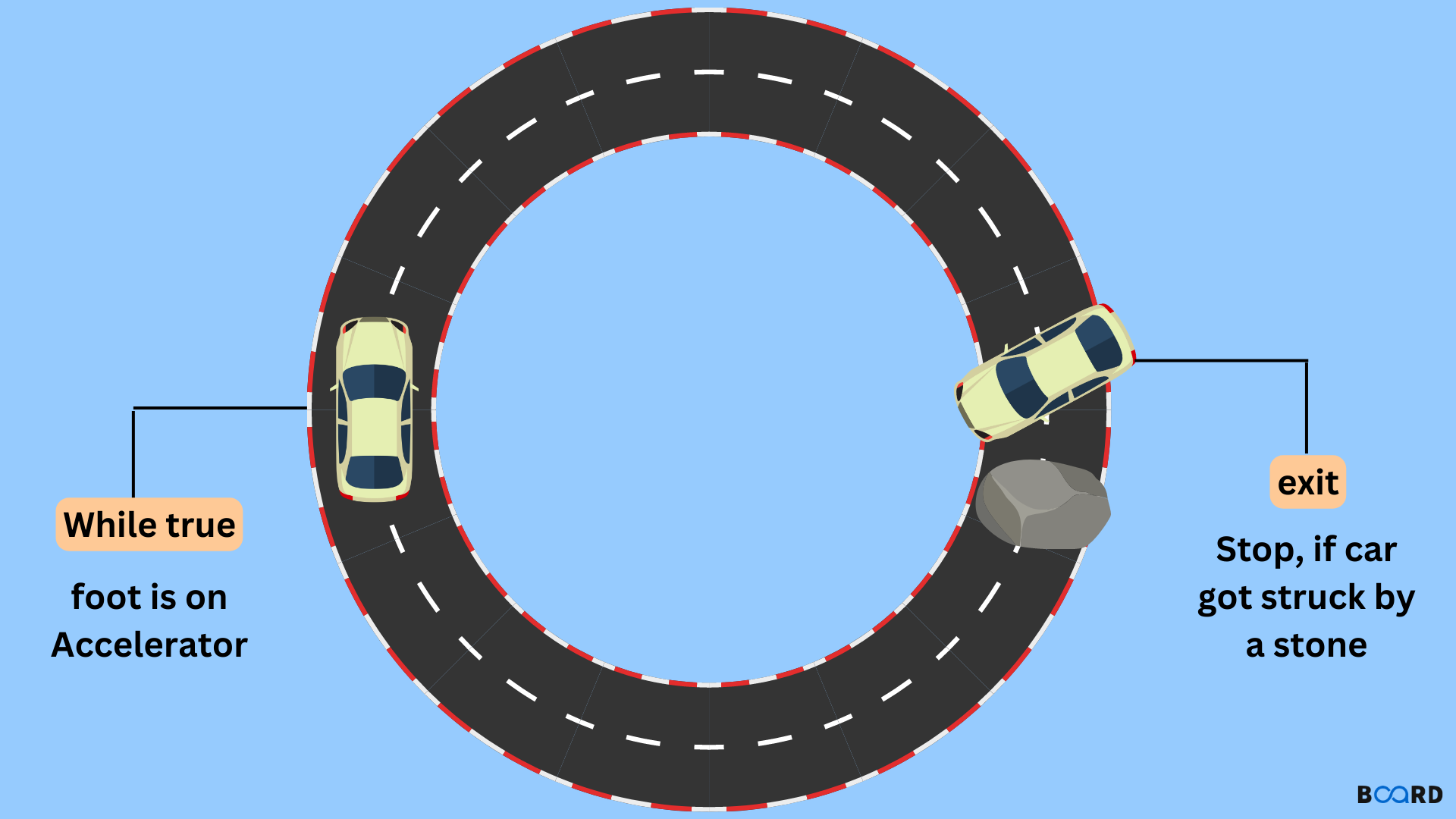
At its simplest, while True is a control flow statement. In Python, True is a boolean literal that always evaluates to true. Consequently, while True: creates a loop that, by default, will never terminate on its own. The code indented beneath it will run over and over again. This seemingly straightforward mechanism forms the backbone of applications that need to be always “on” and always responsive.
while True:
# This block of code will execute repeatedly
# until a break statement or an error occurs.
print("System is active and monitoring...")
# Add actual drone-related logic here
For a drone’s flight controller, for example, this infinite loop paradigm is essential. It ensures that the system is perpetually checking sensor inputs, calculating motor adjustments, and executing the pre-programmed flight path or responding to real-time commands. Without such a persistent loop, the drone’s brain would simply execute its tasks once and then cease, rendering it inert after the initial instructions. It facilitates a constant state of readiness and execution, which is crucial for safety and operational efficiency in autonomous flight.
Breaking the Infinite Loop: Controlled Exits
While while True implies an unending cycle, practical applications in drone technology and other embedded systems rarely allow for truly endless execution. Instead, the “infinite” loop is carefully managed and designed with controlled exit conditions. The most common way to terminate a while True loop is using the break statement. This statement, when encountered inside a loop, immediately terminates it and transfers control to the statement immediately following the loop.
battery_level = 100
while True:
# Monitor battery level
if battery_level <= 20:
print("Warning: Low battery. Initiating return to home sequence.")
# Trigger RTH function, then break
break
else:
print(f"Battery at {battery_level}%. Continuing mission.")
# Simulate battery drain and other flight logic
battery_level -= 1 # Placeholder for actual power consumption logic
# Introduce a short delay to prevent CPU overload in real systems
# time.sleep(0.1)
print("Mission ended or drone landed safely.")
Controlled exits are vital for managing mission parameters, responding to critical system states (like low battery, loss of signal, or system errors), and allowing for graceful shutdowns. In drone operations, an unmanaged infinite loop could lead to a drone continuing a mission past safe limits, ignoring critical commands, or depleting its power source entirely. Therefore, integrating intelligent if conditions with break statements is a standard and critical practice.
while True in Drone Autonomous Systems
The utility of while True extends deeply into the core functionalities of autonomous drone technology, underpinning various critical systems that enable sophisticated flight, data collection, and intelligent interaction with the environment.
Flight Control Loops
At the heart of every autonomous drone lies its flight controller, a miniature computer responsible for stabilizing the aircraft and executing flight commands. This controller operates on a continuous feedback loop: it reads data from gyroscopes, accelerometers, magnetometers, and GPS modules; processes this information to determine the drone’s current orientation and position; calculates necessary adjustments to motor speeds; and then sends commands to the electronic speed controllers (ESCs). This entire cycle must happen hundreds or even thousands of times per second to maintain stable flight, especially in adverse conditions. A while True loop provides the perfect framework for this constant sensor reading, computation, and actuation cycle, ensuring real-time responsiveness and stability.
# Simplified representation of a drone's main flight loop
def initialize_sensors():
print("Sensors initialized.")
return True
def read_sensor_data():
# Simulate reading data from IMU, GPS, etc.
return {"pitch": 1.2, "roll": -0.5, "yaw": 15.0, "altitude": 50.0}
def calculate_motor_commands(sensor_data, target_state):
# PID control or other stabilization algorithms
return {"motor1": 1500, "motor2": 1490, "motor3": 1510, "motor4": 1505}
def send_to_esc(motor_commands):
# Send commands to Electronic Speed Controllers
print(f"Sending motor commands: {motor_commands}")
def check_safety_protocols():
# Check for geofence breaches, low battery, critical errors
return True # Or False if a critical error occurs
def drone_flight_controller():
if not initialize_sensors():
print("Sensor initialization failed. Aborting flight.")
return
target_state = {"pitch": 0, "roll": 0, "yaw": 0, "altitude": 50.0} # Example target
<p style="text-align:center;"><img class="center-image" src="https://www.freecodecamp.org/news/content/images/2020/08/do-while.jpg" alt=""></p>
while True:
sensor_data = read_sensor_data()
motor_commands = calculate_motor_commands(sensor_data, target_state)
send_to_esc(motor_commands)
if not check_safety_protocols():
print("Safety protocol breach. Initiating emergency landing.")
break
# Simulate small delay for real-time processing
# time.sleep(0.01)
print("Flight controller loop terminated.")
# drone_flight_controller()
Sensor Data Acquisition and Processing
Drones are increasingly equipped with an array of sophisticated sensors for remote sensing, mapping, and surveillance. LiDAR, thermal cameras, multispectral cameras, and high-resolution optical cameras constantly stream vast amounts of data. Processing this data often requires continuous acquisition, buffering, and analysis. A while True loop is ideal for managing this perpetual data pipeline. It allows the drone’s onboard computer to continuously poll sensors, capture images or point clouds, and feed them into processing algorithms for object detection, environmental monitoring, or 3D reconstruction. This ensures that no critical data is missed and that real-time insights can be generated for applications like precision agriculture, infrastructure inspection, or disaster response.
AI Follow Mode and Object Tracking
One of the most compelling innovations in drone technology is AI follow mode and advanced object tracking. These features rely heavily on continuous visual processing. A drone using AI follow mode must constantly analyze video feeds, identify the target (e.g., a person, vehicle), calculate its position and trajectory, and then adjust the drone’s flight path to maintain a desired distance and angle. This entire cycle—capture, analyze, predict, adjust—is a continuous process perfectly encapsulated by a while True loop. The loop ensures that the AI model is always fed new frames, and the drone’s movement is dynamically adapted to the moving target, delivering a seamless and intelligent user experience.
Enhancing Drone Innovation with Persistent Logic
The while True loop is not just about keeping things running; it’s about enabling a level of continuous operation that fosters significant innovation across various drone applications.
Telemetry and Communication Protocols
Drones constantly communicate with ground control stations (GCS) and other networked systems. This involves sending telemetry data (position, altitude, speed, battery status) and receiving commands (flight plan updates, camera controls, emergency overrides). Both the drone and the GCS often employ while True loops to manage these communication channels. The drone’s loop continuously packages and transmits telemetry, while the GCS’s loop continuously listens for incoming data and user commands. This persistent communication ensures that operators always have up-to-date information and can intervene when necessary, which is vital for safe and effective beyond visual line of sight (BVLOS) operations and coordinated swarm intelligence applications.
Real-time Mapping and Environmental Sensing
For applications like surveying, construction monitoring, and environmental assessment, drones can create real-time maps or detect anomalies on the fly. This often involves continuously capturing geospatial data and stitching it together into a coherent model. A while True loop can drive the data acquisition process, feeding images or sensor readings into a real-time mapping engine. This continuous input allows for the dynamic generation of orthomosaics, 3D models, or precise environmental data layers, significantly accelerating the insights derived from drone missions and enabling rapid decision-making in critical scenarios.
Predictive Maintenance and System Monitoring
In advanced drone fleets, predictive maintenance is crucial for maximizing operational uptime and ensuring safety. Drones can continuously monitor their own health metrics—motor temperatures, vibration levels, battery cell voltage, component wear. A while True loop can be used to periodically sample these internal sensors, analyze the data for anomalies or trends, and transmit warnings or diagnostic information back to a central maintenance system. This proactive approach, driven by continuous monitoring, allows for timely intervention before failures occur, reducing repair costs and significantly improving fleet reliability and safety.
Best Practices and Considerations for Drone Developers
While while True is a powerful construct, its proper implementation in safety-critical and resource-constrained environments like drones requires careful consideration and adherence to best practices.
Resource Management and Efficiency
An unmanaged while True loop can quickly consume all available CPU cycles, leading to system instability, overheating, and rapid battery drain. Drone developers must ensure that each iteration of the loop is as efficient as possible. This involves optimizing algorithms, minimizing redundant computations, and judiciously using time.sleep() or asynchronous programming techniques (asyncio) to allow the CPU to perform other tasks or enter low-power states between iterations. Efficient resource management is not just an optimization; it’s a necessity for extending flight time and ensuring reliable performance.
Error Handling and Resilience
Autonomous systems must be resilient to unexpected events and errors. Within a while True loop, robust error handling is paramount. try-except blocks should be used to gracefully catch and manage exceptions that might occur during sensor readings, motor commands, or communication. Instead of crashing the entire drone system, an error should ideally trigger a fallback mechanism (e.g., attempt to re-establish connection, log the error, or initiate an emergency landing sequence). The loop can then either continue safely or terminate gracefully, ensuring the drone’s overall integrity and preventing catastrophic failures.
State Management and Event-Driven Architectures
For complex drone behaviors, simply executing code in an infinite loop might not be sufficient. Modern drone software often employs state machines or event-driven architectures where the while True loop acts as the central dispatcher. It continuously checks for new events (e.g., a new command from GCS, a detected obstacle, a change in flight mode, an external trigger) and transitions the drone’s internal state accordingly. This approach allows for highly flexible, modular, and responsive drone behavior, where the continuous loop ensures that no event is missed and the system can react dynamically to its environment and operational directives. This systematic handling of states and events, all orchestrated within the persistent while True framework, is what enables the sophisticated autonomous capabilities that define the next generation of drone technology.