In the intricate world of drone systems, particularly those demanding precise control, real-time feedback, and dynamic maneuverability, understanding latency is not just important—it’s absolutely critical. For pilots engaging in high-speed FPV racing, performing delicate aerial cinematography, or relying on autonomous flight capabilities, the acronym “COD” can represent the complex “Command and Operations Dynamics” that govern a drone’s responsiveness and overall performance. Latency, in this crucial operational environment, refers to the inherent delay between an action initiated by the pilot or an internal system command and the drone’s actual physical response or the visual feedback received. This delay, often measured in milliseconds, profoundly impacts a drone’s stability, precision, and the pilot’s ability to maintain a seamless connection with their aircraft.
The Critical Role of Latency in Drone Systems
Latency is the invisible thread connecting a pilot’s intent to the drone’s execution. Every command, from a subtle stick input to an automated flight path adjustment, travels through a series of electronic components and wireless transmissions, each introducing a tiny fraction of delay. While seemingly minor, cumulative latency can transform a fluid flight experience into a sluggish and unpredictable struggle. In applications like FPV (First Person View) racing, where pilots navigate tight courses at high speeds based solely on a live video feed, even a few milliseconds of delay can mean the difference between a podium finish and a catastrophic crash. Similarly, for sophisticated autonomous systems, latency in sensor data processing or command execution can compromise obstacle avoidance, mission accuracy, and safety. Understanding and mitigating these delays is a cornerstone of advanced drone technology.
Types of Latency in Drone Operations
The overall responsiveness of a drone system is a sum of several distinct types of latency, each contributing to the total delay experienced by the pilot or the drone’s internal control loop. Identifying and optimizing these individual components is key to achieving peak performance.
Control Link Latency
This is the delay between a pilot’s input on their remote controller and the drone’s flight controller receiving and acting upon that command. When a pilot moves a stick on their transmitter, the signal is encoded, wirelessly transmitted to the drone’s receiver, decoded, and then processed by the flight controller, which in turn adjusts motor speeds or servo positions. Factors influencing control link latency include:
- Radio Protocol: Different transmission protocols (e.g., ELRS, Crossfire, FrSky, Spektrum) have varying update rates and signal processing efficiencies. High-performance protocols are designed for ultra-low latency.
- Controller Processing: The internal processing speed of the remote controller itself can introduce minor delays.
- Receiver and Flight Controller Processing: The speed at which the drone’s receiver decodes the signal and the flight controller processes it and sends commands to the electronic speed controllers (ESCs) contributes significantly.
Minimizing control link latency is paramount for responsive and precise flight, giving the pilot an immediate, “connected” feel with the aircraft, essential for acrobatic maneuvers and precise control in challenging conditions.
Video Transmission Latency (FPV Systems)
For FPV pilots, this is perhaps the most tangible form of latency. It’s the delay between the drone’s camera capturing an image and that image appearing on the pilot’s goggles or monitor. This end-to-end chain involves several stages:
- Camera Sensor Processing: The time taken for the camera sensor to capture light and convert it into digital data.
- Video Encoding/Decoding: For digital FPV systems, the raw video data must be encoded by the drone’s video transmitter unit and then decoded by the receiver in the pilot’s goggles/monitor. This process is computationally intensive and a significant source of latency. Analog FPV systems, while generally lower resolution, often boast extremely low inherent encoding/decoding latency.
- Wireless Transmission: The time taken for the video signal to travel from the drone to the pilot’s receiver. This is largely dependent on distance, signal strength, and interference.
- Display Refresh Rate: The refresh rate of the pilot’s goggles or monitor also plays a role, as a slower refresh rate can introduce additional perceived delay.
High video latency makes precise piloting incredibly difficult, as the pilot is always reacting to an outdated view of the environment. In fast-paced scenarios like drone racing, it can lead to misjudgments, collisions, and a disorienting flight experience.
Sensor and Processing Latency
Beyond direct pilot inputs, drones rely heavily on onboard sensors (IMUs, GPS, barometers, lidar, optical flow, etc.) for stabilization, navigation, and autonomous functions. Sensor latency refers to the delay between a physical event (e.g., a change in orientation, position) being detected by a sensor and that data being fully processed and acted upon by the flight controller.
- Sensor Data Acquisition: The time it takes for a sensor to measure and output data.
- Flight Controller Processing: The delay in the flight controller’s algorithms analyzing sensor data to maintain stability, execute waypoints, or avoid obstacles.
- Inter-component Communication: Delays in data transfer between different chips and modules on the drone.
Inaccurate or delayed sensor data can lead to unstable flight characteristics, poor GPS lock, imprecise autonomous navigation, and ineffective obstacle avoidance, making the drone less reliable and potentially unsafe for complex operations.
Quantifying and Minimizing Latency for Superior Performance
Achieving ultra-low latency is a continuous pursuit in drone technology, driven by innovations across hardware and software.
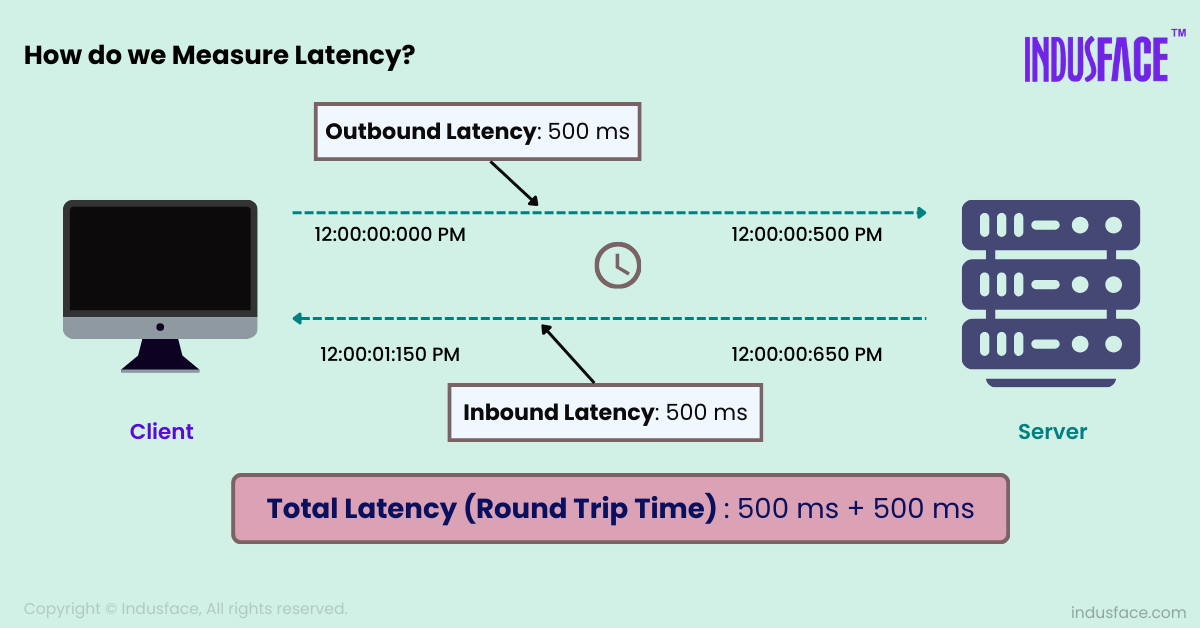
Measuring Latency
Measuring latency accurately often involves specialized equipment. For control links, high-speed oscilloscopes can measure the time from a physical stick movement to the corresponding signal change at the motor outputs. For video latency, dedicated latency testers can measure the delay from a visual event in front of the camera to its appearance on the FPV display, often using high-frame-rate cameras to analyze individual frames. Pilots often rely on subjective feel, but objective measurements provide concrete data for optimization.
Technological Advancements
The drone industry continually pushes the boundaries of low-latency performance:
- Digital FPV Systems: Recent advancements in digital FPV (e.g., DJI O3 Air Unit, HDZero, Walksnail Avatar) offer significantly improved image quality over analog systems, with rapidly decreasing latency levels that now rival or even surpass high-end analog setups, especially at lower resolutions or higher frame rates. These systems often feature highly optimized encoding/decoding chips and robust transmission protocols.
- High-Refresh-Rate Radio Protocols: Protocols like ExpressLRS (ELRS) boast incredibly fast update rates (up to 1000Hz or 1KHz), drastically reducing control link latency to just a few milliseconds.
- Faster Flight Controllers and Optimized Firmware: More powerful microcontrollers on flight boards can process sensor data and execute commands faster. Highly optimized firmware (like Betaflight, ArduPilot) continuously refines algorithms to minimize processing overhead.
- Low-Latency Cameras: FPV cameras are specifically designed with minimal internal processing delay to get the image data out as quickly as possible.
- Integrated Systems: Tightly integrated drone systems, where all components are designed to work seamlessly together, often exhibit lower overall latency than cobbled-together setups.
Practical Strategies for Pilots
Beyond choosing cutting-edge hardware, pilots can adopt practices to minimize latency:
- Component Selection: Prioritize components (FC, ESCs, FPV system, radio gear) known for low latency.
- Firmware Optimization: Keep flight controller firmware updated and tune PID loops effectively.
- Antenna Setup: Use high-quality antennas correctly positioned for optimal signal transmission and reception, reducing signal degradation that can increase effective latency.
- Minimize Interference: Fly in environments with minimal wireless interference, which can cause signal degradation and retransmissions, adding latency.
- Wiring and Connections: Ensure all internal wiring and connectors are secure and of high quality to prevent signal integrity issues.
The Impact of Latency on Drone Applications
The impact of latency extends across the entire spectrum of drone applications, fundamentally shaping their capabilities and safety.
FPV Racing and Freestyle
For FPV racing, latency is the ultimate performance bottleneck. Every millisecond of delay means the pilot is flying a fraction of a meter behind their visual perception, leading to missed gates, imprecise turns, and slower lap times. In freestyle flying, low latency provides the pilot with an immediate, intuitive connection to the drone, enabling complex, fluid maneuvers that demand instantaneous reaction and feedback. High latency, conversely, creates a disconnect, making the drone feel sluggish and uncontrollable, diminishing both performance and pilot enjoyment.
Autonomous Flight and Mapping
In autonomous operations, latency affects the drone’s ability to react to dynamic changes in its environment in real-time. For obstacle avoidance systems, a delayed processing of lidar or optical flow data can mean the difference between successfully circumnavigating an object and colliding with it. For precision mapping and surveying, timely synchronization of GPS data with camera triggers is essential for accurate photogrammetry. High latency in communication links can also delay the transmission of mission-critical data or emergency commands, reducing the reliability and safety of autonomous missions.
Cinematic and Professional Operations
Even in applications where raw speed isn’t the primary goal, such as aerial filmmaking or industrial inspections, low latency significantly enhances the operator’s experience and the quality of the output. For cinematic shots, immediate visual feedback allows camera operators to frame shots precisely and execute smooth, deliberate camera movements without lag. In professional inspections, a responsive drone provides confidence, enabling operators to navigate tight spaces or inspect critical infrastructure with greater accuracy and safety. A highly responsive drone feels more like an extension of the pilot’s will, leading to more confident and professional results across the board.
Ultimately, whether commanding a high-speed racing quad or overseeing a sophisticated autonomous mapping mission, a thorough understanding of latency and its various forms is indispensable. By diligently selecting components, optimizing systems, and embracing technological advancements, drone operators can minimize these critical delays, unlocking the full potential of their aircraft and achieving unparalleled levels of control and performance within the demanding Command and Operations Dynamics of modern drone flight.