The world of flight technology, particularly concerning advanced drones and autonomous systems, thrives on precision, responsiveness, and predictive capabilities. At the heart of these capabilities lies a fundamental mathematical concept: the derivative. Far from being an abstract formula confined to textbooks, a math derivative is the essential tool for understanding and controlling the instantaneous rate of change of any dynamic parameter. For a drone, where every millisecond counts in maintaining stability, navigating complex environments, or executing intricate maneuvers, understanding these rates of change is not just beneficial—it’s absolutely critical.
Unlocking the Dynamics of Flight: The Derivative as a Rate of Change
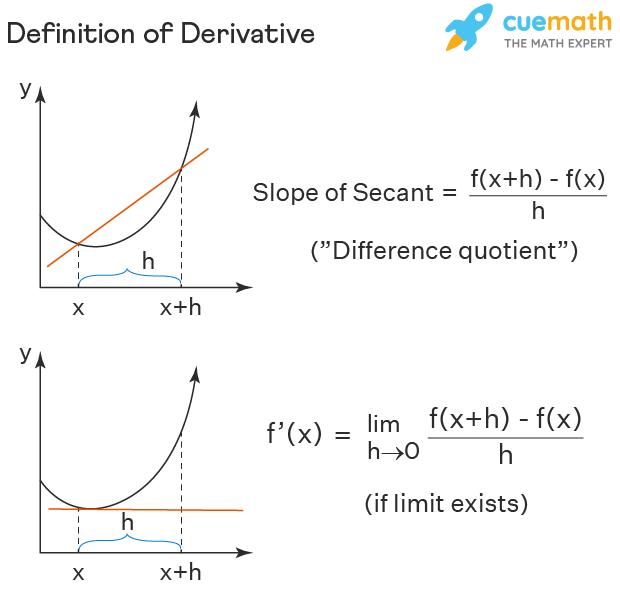
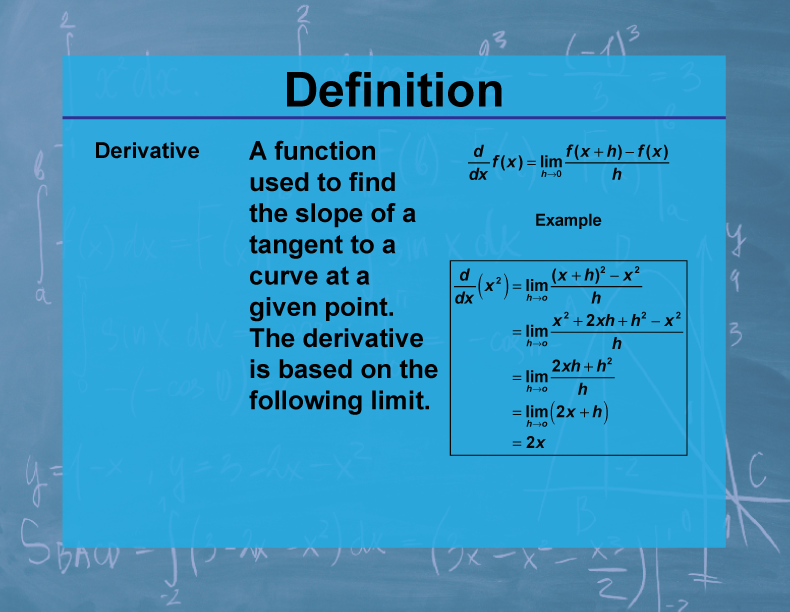
In essence, a derivative measures how sensitive a function is to changes in its input. In the context of drone flight, this translates to understanding how various physical quantities—like position, speed, or orientation—are changing over time. Drones are inherently dynamic systems; their state is never static. They are constantly moving, accelerating, turning, and adjusting to environmental factors like wind gusts. Without the ability to quantify these instantaneous rates of change, achieving stable flight, precise navigation, or intelligent autonomous behavior would be an insurmountable challenge. The derivative provides the mathematical lens through which flight controllers perceive and react to the drone’s ever-evolving state.
From Stillness to Motion: Position, Velocity, and Acceleration
The most intuitive application of derivatives in flight technology lies in describing motion itself. Consider a drone moving through the air. Its position at any given moment can be precisely defined by its coordinates in a 3D space. When we apply the concept of a derivative to this position, we obtain its velocity. Velocity is simply the instantaneous rate at which the drone’s position is changing, telling us both its speed and direction. GPS modules provide raw position data, but it’s the derivative that transforms this static information into meaningful velocity vectors, crucial for path planning and waypoint navigation.
Taking the derivative one step further, if we calculate the instantaneous rate of change of the drone’s velocity, we arrive at its acceleration. Acceleration describes how quickly the drone’s velocity is changing—whether it’s speeding up, slowing down, or changing direction. Inertial Measurement Units (IMUs), equipped with accelerometers, directly measure these forces, providing real-time data on the drone’s acceleration in all axes. By understanding acceleration, flight controllers can infer the forces acting on the drone, allowing for precise adjustments to motor thrust and gimbal movements. These layers of derivatives—from position to velocity to acceleration—form the fundamental kinematic chain that describes all drone movement, enabling systems to not only know where the drone is but also where it’s going and how quickly its movement is altering. This foundational understanding is indispensable for everything from basic hovering to complex acrobatic maneuvers, providing the core data for all subsequent control decisions.
The Backbone of Stability: Derivatives in Control Systems
The stability of a drone in flight is not a passive state; it’s an actively maintained equilibrium. This constant balancing act is largely managed by sophisticated control algorithms, with the Proportional-Integral-Derivative (PID) controller being a ubiquitous example. While the Proportional (P) term reacts to the current error and the Integral (I) term addresses accumulated past errors, it is the Derivative (D) term that directly leverages the mathematical derivative to provide forward-looking, proactive control.
The D-term in a PID controller works by calculating the instantaneous rate of change of the error signal. For a drone, an “error” could be the difference between its desired altitude and its actual altitude, or its target roll angle versus its current roll angle. Instead of just reacting to the magnitude of this error (P-term) or how long it has persisted (I-term), the D-term analyzes how quickly that error is changing. If the error is rapidly increasing, the D-term predicts that the drone is moving away from its target even faster. Conversely, if the error is rapidly decreasing, it suggests the drone is quickly approaching its target. This predictive capability is what makes the derivative component so powerful in stabilization systems.
Proactive Control: Anticipating and Counteracting Disturbances
The predictive nature of the derivative term enables truly proactive control. Imagine a drone holding a steady hover when a sudden gust of wind pushes it sideways, causing its roll angle to change. Without a derivative term, the controller would only react once the drone has already tilted significantly (P-term) or started drifting for a prolonged period (I-term). The D-term, however, senses the rate at which the roll angle is changing as soon as the wind hits. It doesn’t wait for the drone to be significantly off balance; it immediately detects the tendency to go off balance.
This allows the flight controller to initiate corrective action much sooner and more subtly. By applying an counter-force to the motors in anticipation of a larger deviation, the derivative term effectively dampens oscillations and prevents overshoots. Instead of the drone wobbling around its desired position, it maintains a much smoother and more stable flight path. This proactive response is crucial for achieving the smooth, cinematic footage required in aerial filmmaking, for maintaining precise positions in mapping missions, and for ensuring the overall safety and reliability of autonomous operations. It transforms reactive control into intelligent, anticipatory stabilization, making the drone’s movements fluid and resilient even in challenging conditions.
Navigating the Skies: Derivatives for Path Optimization and Sensing
Beyond core stabilization, derivatives play an indispensable role in advanced navigation and the intelligent interpretation of sensor data. Autonomous drones don’t just follow predefined waypoints; they dynamically adjust their trajectories, optimize paths, and construct a real-time understanding of their environment. This level of sophistication is heavily reliant on processing rates of change.
For path planning, derivatives are used to evaluate and optimize complex flight paths. Algorithms can calculate the derivative of a drone’s energy consumption with respect to its speed or altitude, allowing them to determine the most energy-efficient trajectory for a given mission. Similarly, derivatives help define smooth, continuous curves for flight paths, ensuring that maneuvers are executed gracefully and safely, avoiding abrupt changes in velocity or acceleration that could destabilize the drone or strain its components. In dynamic environments, where targets move or conditions change, derivatives enable real-time recalculation of optimal paths, allowing the drone to adapt on the fly. This could involve adjusting for sudden wind shifts, tracking a moving subject, or re-routing around newly detected obstacles, all based on the rates of change of relevant parameters.
Fusing Sensor Data for Accurate State Estimation
Modern drones are equipped with an array of sensors: GPS for global positioning, IMUs (accelerometers and gyroscopes) for orientation and motion, barometers for altitude, and often visual or ultrasonic sensors for local awareness. Each sensor provides data that is inherently noisy and prone to drift. To achieve a comprehensive and reliable understanding of the drone’s state—its precise position, velocity, attitude (roll, pitch, yaw), and angular rates—these diverse streams of information must be intelligently combined, a process known as sensor fusion.
Algorithms like the Kalman filter, a cornerstone of drone navigation, heavily utilize derivatives for this purpose. The Kalman filter predicts the drone’s next state (e.g., its future position and velocity) based on a dynamic model of its movement, which incorporates derivatives. It then uses new sensor measurements to correct these predictions, effectively filtering out noise and providing a much more accurate and robust estimate of the drone’s true state than any single sensor could offer. For example, GPS might provide slow but accurate position data, while an IMU provides fast but drifting acceleration data. By using derivatives to predict velocity from IMU data and then comparing it with GPS-derived velocity, the Kalman filter can estimate true velocity more reliably. This sophisticated fusion of data, powered by derivative-based prediction and correction, is what makes autonomous flight reliable and precise, underpinning everything from accurate mapping to stable follow-me modes.
Intelligent Obstacle Avoidance: Reacting to the Rate of Closure
One of the most critical aspects of advanced flight technology is intelligent obstacle avoidance. While rudimentary systems might simply stop or reroute upon detecting an obstacle within a fixed distance, truly intelligent systems use derivatives to predict and react proactively, ensuring safer and smoother operations, especially in complex or dynamic environments.
The key to this advanced capability lies in understanding the “rate of closure” with an obstacle. This is the instantaneous rate at which the distance between the drone and an obstacle is decreasing. If a drone is approaching an obstacle, its distance to that obstacle is changing over time. By taking the derivative of this distance with respect to time, the system can determine precisely how quickly that gap is closing. This metric is far more informative than just knowing the current distance. A large distance with a high rate of closure is a much more immediate threat than a small distance with a low rate of closure.

Beyond Simple Detection: Time-to-Collision Calculations
Knowing the rate of closure allows the drone’s flight controller to go beyond simple detection and calculate the crucial “time-to-collision” (TTC). TTC is a direct application of derivatives, indicating how much time remains before an impact, assuming current velocities are maintained. If the current distance to an obstacle is ‘D’ and the rate of closure is ‘R’ (the derivative of D), then TTC can be approximated as D/R.
This calculation is vital for making informed, real-time decisions. Instead of reacting abruptly when an obstacle is within a fixed safety buffer, the drone can use TTC to execute smoother, more efficient evasive maneuvers. If the TTC is high, the drone might subtly adjust its path. If the TTC is very low, it might initiate an emergency stop or a sharp turn. This derivative-based approach allows drones to navigate much more dynamically, anticipate potential collisions, and react with graded responses rather than binary stop/go decisions. It enables drones to operate safely in crowded airspace, near power lines, or amidst natural terrain, transforming obstacle avoidance from a reactive safety measure into a proactive, intelligent navigation strategy that significantly enhances operational safety and efficiency in all facets of flight technology.