In the rapidly evolving landscape of drone technology and innovation, understanding the core concepts that drive advanced capabilities is paramount. Among these, the term “conv” frequently emerges, typically as a shorthand for “convolution” or, more commonly, “convolutional” in the context of Convolutional Neural Networks (CNNs). These sophisticated algorithms are fundamental to many of the cutting-edge features seen in modern drones, from autonomous navigation and intelligent object tracking to precise mapping and remote sensing. At its heart, a conv operation represents a specific mathematical function that is exceptionally powerful for processing structured data, especially images.
The Foundational Concept of Convolution
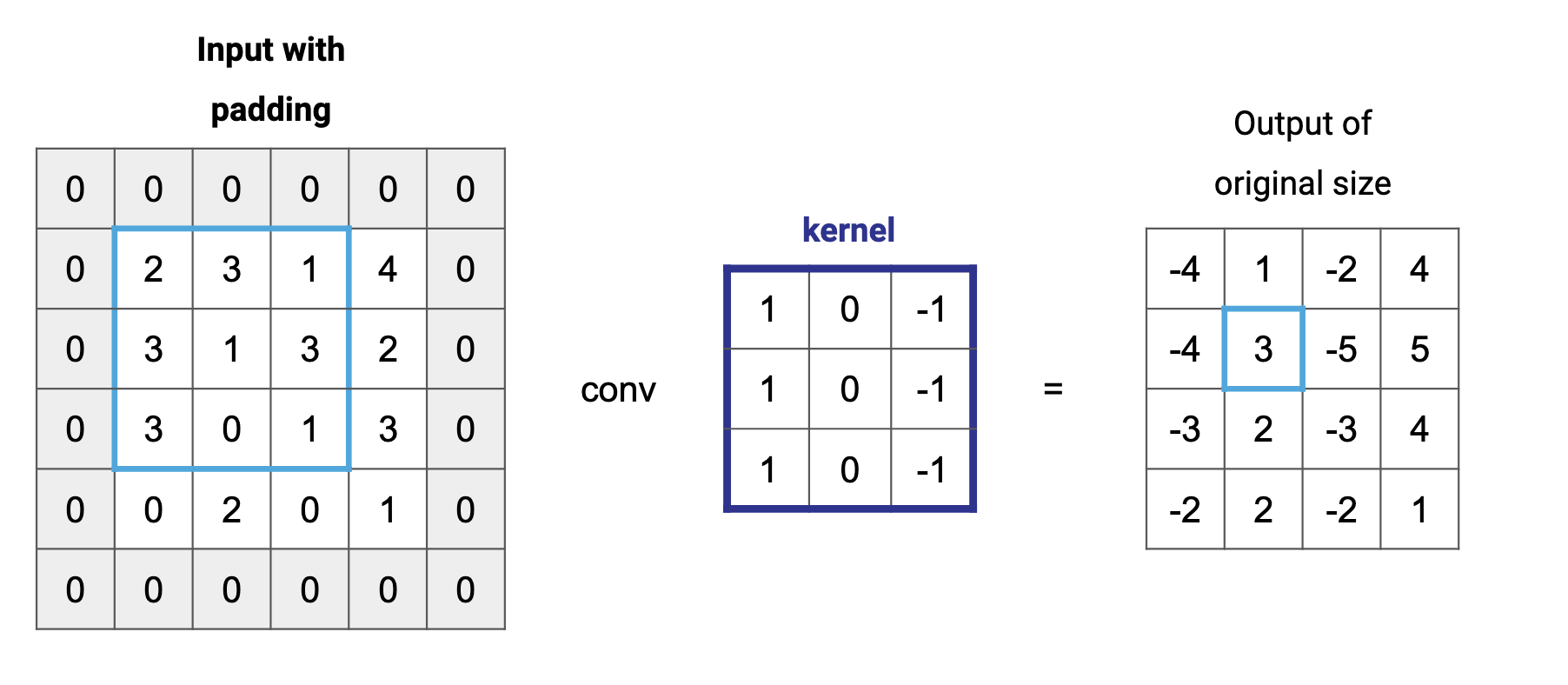
At its most basic, convolution is a mathematical operation on two functions that produces a third function, expressing how the shape of one is modified by the other. In the realm of digital image processing, this translates to applying a “filter” or “kernel” – a small matrix of numbers – across an image. This filter slides over the image, pixel by pixel, performing element-wise multiplication with the corresponding section of the image and then summing the results to create a single output pixel in a new, processed image. This process is repeated until the filter has covered the entire input image.
Convolution as a Feature Detector
The brilliance of convolution lies in its ability to detect specific features within data. Different filters are designed to highlight different aspects. For instance, a simple filter might detect edges by identifying sharp changes in pixel intensity, while another might blur an image by averaging pixel values, or sharpen it by emphasizing contrasts. These filters act as feature extractors, transforming raw pixel data into more abstract and meaningful representations. The output of a convolution operation, often called a “feature map” or “activation map,” indicates where in the original image the filter’s specific feature was detected. This inherent ability to learn and recognize patterns, irrespective of their location within the input, makes convolution incredibly robust for visual data analysis.
From Image Processing to Neural Networks
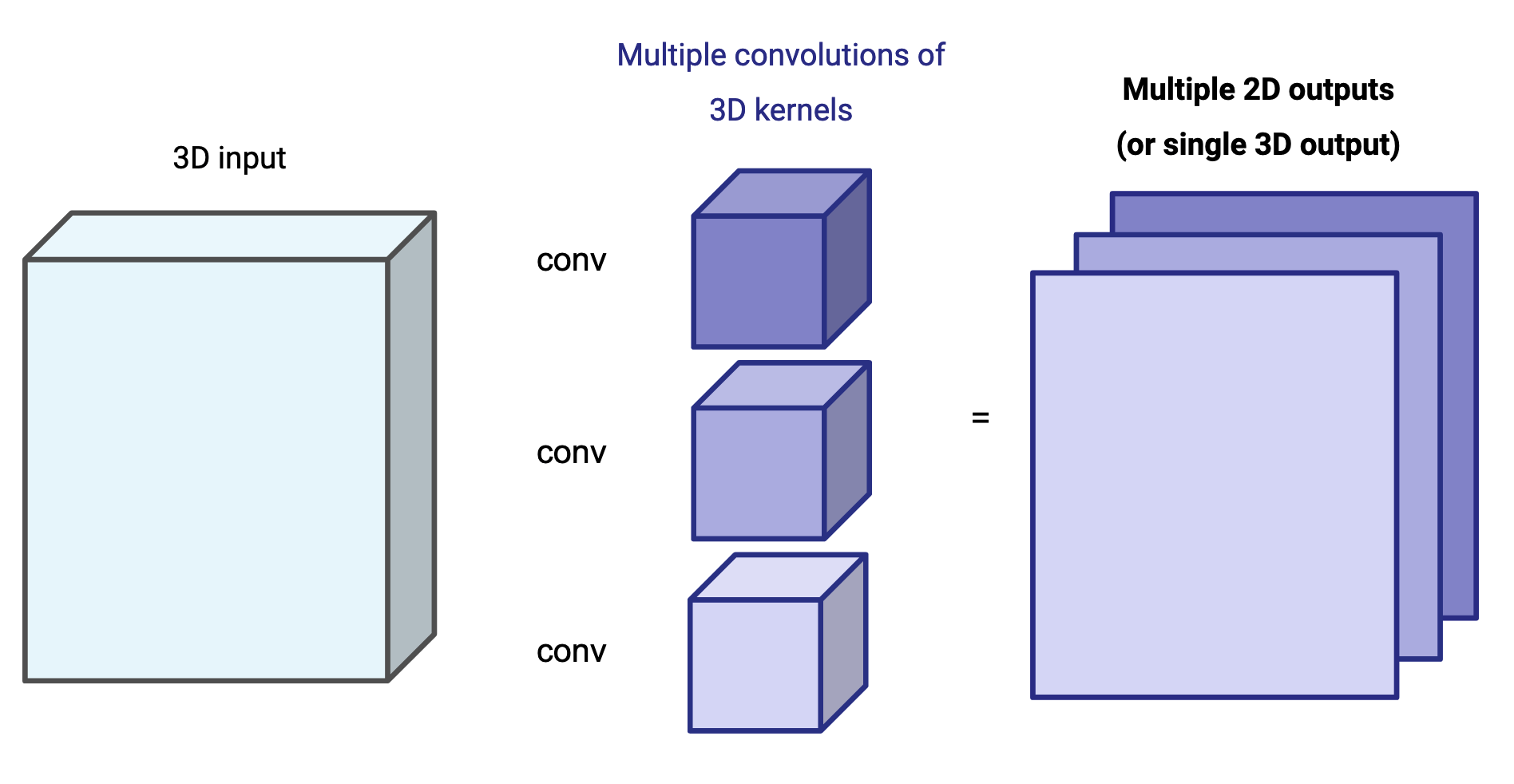
While convolution has been a cornerstone of traditional image processing for decades, its true transformative power became evident with its integration into neural networks. Conventional artificial neural networks struggled with image data due to the sheer volume of pixels and the need for a vast number of parameters to connect every input pixel to every neuron in subsequent layers. Convolutional Neural Networks overcome this by leveraging the principles of convolution: shared weights (the same filter is applied across the entire image) drastically reduce the number of parameters, and local receptive fields (neurons only connect to a small region of the input) enable the network to focus on local patterns before combining them into higher-level features. This architectural shift made deep learning on visual data feasible and highly effective.
Convolutional Neural Networks (CNNs) in Drone Intelligence
CNNs are a specialized class of deep learning models designed specifically for processing data that has a known grid-like topology, such as images. They are the backbone of many advanced AI capabilities in modern drones, allowing them to interpret complex visual information from their surroundings. A typical CNN architecture consists of multiple layers, each performing a specific transformation on the input data.
Architectures and Learning
A CNN typically comprises convolutional layers, activation functions (like ReLU), pooling layers, and fully connected layers. Convolutional layers, as discussed, apply learned filters to extract features. Pooling layers then reduce the dimensionality of the feature maps, helping to make the network more robust to variations in position or scale. Fully connected layers, similar to traditional neural networks, take these high-level features and use them for classification or regression tasks. During the training phase, a CNN learns the optimal values for its filters by processing vast amounts of labeled data. Through a process called backpropagation and optimization algorithms (like stochastic gradient descent), the network iteratively adjusts its filter weights to minimize errors in its predictions. This allows the network to automatically discover hierarchical patterns, from simple edges and textures in early layers to complex objects and scenes in deeper layers.
The Power of Feature Hierarchies
One of the most profound strengths of CNNs is their ability to automatically learn a hierarchy of features. Early layers in a CNN might detect fundamental visual elements such as horizontal lines, vertical lines, or specific color blobs. Subsequent layers then combine these primitive features to recognize more complex shapes like corners, curves, or textures. Even deeper layers can then assemble these mid-level features into representations of complete objects – say, a human figure, a tree, a vehicle, or even specific parts of a drone’s environment. This multi-layered, hierarchical approach to feature extraction is what gives CNNs their unparalleled capacity for object recognition, scene understanding, and other sophisticated visual tasks, which are critical for equipping drones with advanced intelligence.
Enabling Autonomous Flight and Navigation
The integration of CNNs has fundamentally transformed the capabilities of autonomous drones. By providing drones with a robust mechanism for visual perception, CNNs enable them to navigate complex environments, avoid obstacles, and perform intelligent actions without constant human intervention.

Object Detection and Obstacle Avoidance
For truly autonomous flight, a drone must be able to accurately perceive its surroundings in real-time. CNNs excel at object detection, allowing drones to identify and localize various entities such as other aircraft, power lines, buildings, trees, and people. Using a camera feed, a trained CNN can draw bounding boxes around detected objects, classify them, and even estimate their distance. This information is crucial for sophisticated obstacle avoidance systems. Instead of simply reacting to proximity sensors, a CNN-powered drone can intelligently predict potential collisions based on the type, speed, and trajectory of detected objects, adjusting its flight path proactively to ensure safety. This capability is vital for operating drones in urban areas, industrial inspections, or search and rescue missions where unexpected obstacles are common.
Scene Understanding and Semantic Segmentation
Beyond just detecting individual objects, CNNs contribute significantly to a drone’s ability to understand the entire scene. Semantic segmentation, a more advanced application of CNNs, involves classifying every single pixel in an image into predefined categories (e.g., sky, ground, water, building, road). This provides a rich, pixel-level understanding of the environment. For autonomous flight, semantic segmentation allows a drone to differentiate between navigable terrain and impassable areas, identify landing zones, or even understand the context of its surroundings (e.g., flying over a forest vs. a city park). This granular understanding enables more intelligent path planning, more graceful maneuvers, and more precise interactions with the environment, moving drones beyond simple waypoint navigation to genuinely intelligent aerial robotics.
Revolutionizing Mapping and Remote Sensing
CNNs have also brought about a significant paradigm shift in how drones collect, process, and interpret data for mapping and remote sensing applications. Their ability to rapidly extract meaningful information from vast datasets of aerial imagery has streamlined workflows and uncovered new insights.
Automated Feature Extraction
Traditionally, extracting specific features from aerial maps – such as buildings, roads, vegetation, or water bodies – was a labor-intensive manual process or relied on complex rule-based algorithms. CNNs automate this process with unprecedented accuracy and speed. By training a CNN on annotated aerial imagery, it can learn to automatically identify and delineate these features across vast geographic areas. For urban planning, this means rapidly generating up-to-date maps of infrastructure. In agriculture, it can involve identifying crop types, health anomalies, or irrigation needs. For environmental monitoring, CNNs can track deforestation, analyze land use changes, or detect illegal mining activities. This automated feature extraction drastically reduces the time and cost associated with generating detailed geographic information system (GIS) layers.
Land Cover Classification and Change Detection
Land cover classification, the process of categorizing different types of physical surfaces (e.g., forest, urban, agricultural, bare ground), is another area where CNNs excel. Drones equipped with multispectral or hyperspectral cameras, combined with CNN processing, can analyze spectral signatures beyond what the human eye can see, leading to highly accurate and granular land cover maps. Furthermore, CNNs are instrumental in change detection. By comparing aerial imagery of the same location taken at different times, CNNs can automatically highlight changes, such as new construction, deforestation, urban sprawl, or shifts in agricultural patterns. This capability is invaluable for monitoring environmental impact, managing natural resources, urban development, and disaster assessment, providing critical insights that would be difficult or impossible to obtain manually.
Future Frontiers: AI Follow Mode and Beyond
The ongoing advancements in CNNs continue to push the boundaries of what drones can achieve, particularly in intelligent interaction and real-time decision-making. Features like AI Follow Mode, once considered futuristic, are now becoming standard, powered by increasingly sophisticated convolutional architectures.
Advanced Tracking and Prediction
AI Follow Mode relies heavily on CNNs to identify and continuously track a designated subject. The drone’s camera feed is fed into a CNN that processes the video in real-time, identifying the target person, vehicle, or object, even amidst varying backgrounds, lighting conditions, and partial occlusions. Beyond simple tracking, advanced CNNs can predict the target’s future movement based on learned patterns and environmental context. This predictive capability allows the drone to anticipate movements, adjust its trajectory smoothly, and maintain optimal framing for cinematic shots or surveillance, making the follow mode more robust and intelligent than ever before. This real-time processing and prediction capability is also crucial for sophisticated autonomous inspection tasks or dynamic security applications.
Real-time Decision Making for Complex Missions
As CNN architectures become more efficient and capable of running on drone-embedded hardware, they are enabling real-time decision-making for increasingly complex autonomous missions. This extends beyond simple obstacle avoidance to include dynamic route optimization, adaptive data collection strategies, and even cooperative drone swarms. For instance, a drone might use CNNs to assess the health of a power line in real-time, deciding exactly where to zoom in for closer inspection or where to deploy specialized sensors. In agricultural spraying, CNNs can analyze crop health on the fly and modulate pesticide application precisely where needed, optimizing resource use. The ability of CNNs to rapidly interpret complex visual cues and translate them into actionable flight decisions is paving the way for drones that are not just autonomous but truly intelligent, capable of performing sophisticated tasks with minimal human oversight in dynamic and unpredictable environments. The “conv” operation, therefore, is not merely a technical detail but a fundamental enabler of the next generation of drone innovation.