In the dynamic world of flight technology, precision in communication and orientation is not merely a convenience; it is an absolute necessity. Among the foundational concepts ensuring this precision are “port” and “starboard”—terms that define the left and right sides of any aerial vehicle, including modern drones and unmanned aerial vehicles (UAVs), when facing forward. Far from being antiquated nautical jargon, these terms represent a universal, unambiguous standard critical for flight navigation, control, safety, and the seamless operation of sophisticated flight systems. Understanding port and starboard is fundamental to both manual pilot control and the intricate algorithms governing autonomous flight, influencing everything from flight path planning to collision avoidance and post-flight analysis.
The Enduring Significance of Standardized Orientation in Flight
The adoption of “port” and “starboard” in aviation, mirroring its maritime origins, addresses a persistent challenge in any three-dimensional environment: consistent spatial referencing. In the air, where orientation can shift rapidly, and relative positions change constantly, relying on subjective terms like “left” or “right” can lead to confusion and potentially catastrophic errors. These standardized terms eliminate ambiguity, providing a fixed frame of reference regardless of an observer’s position relative to the aircraft.
Origins and Universal Application
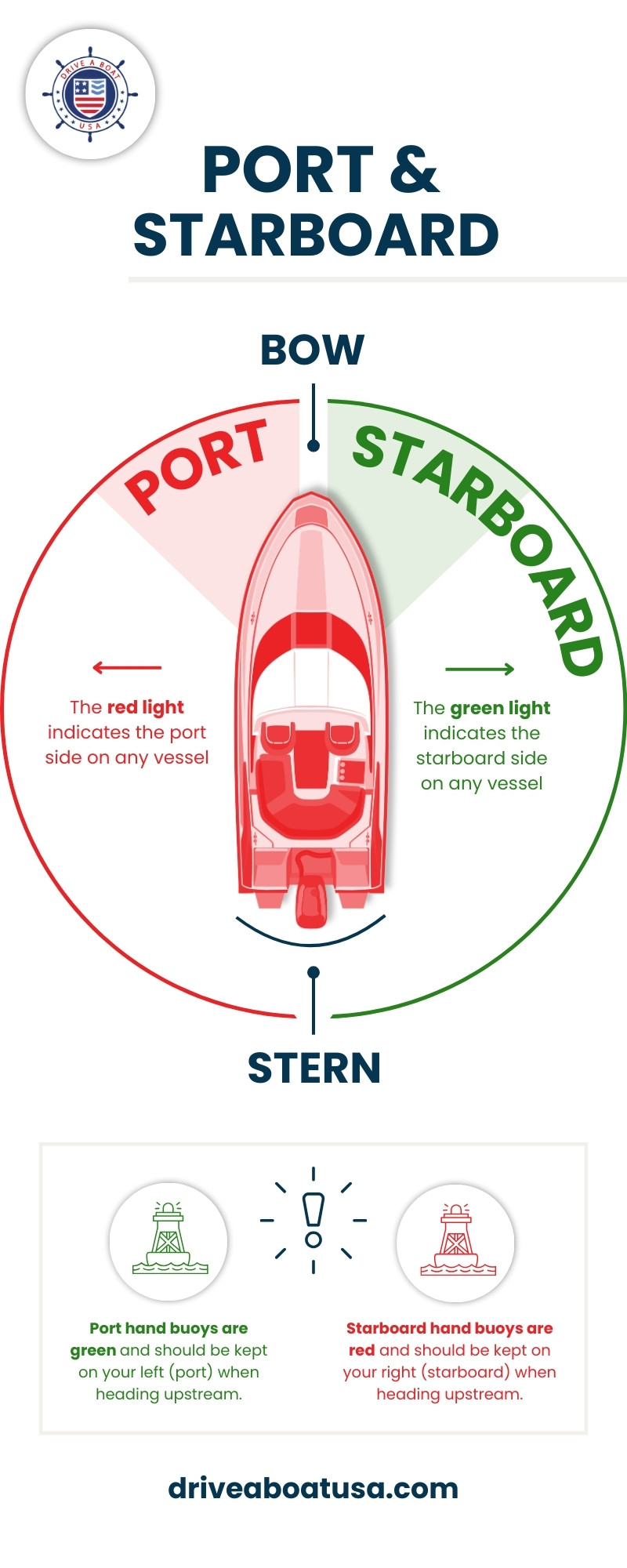
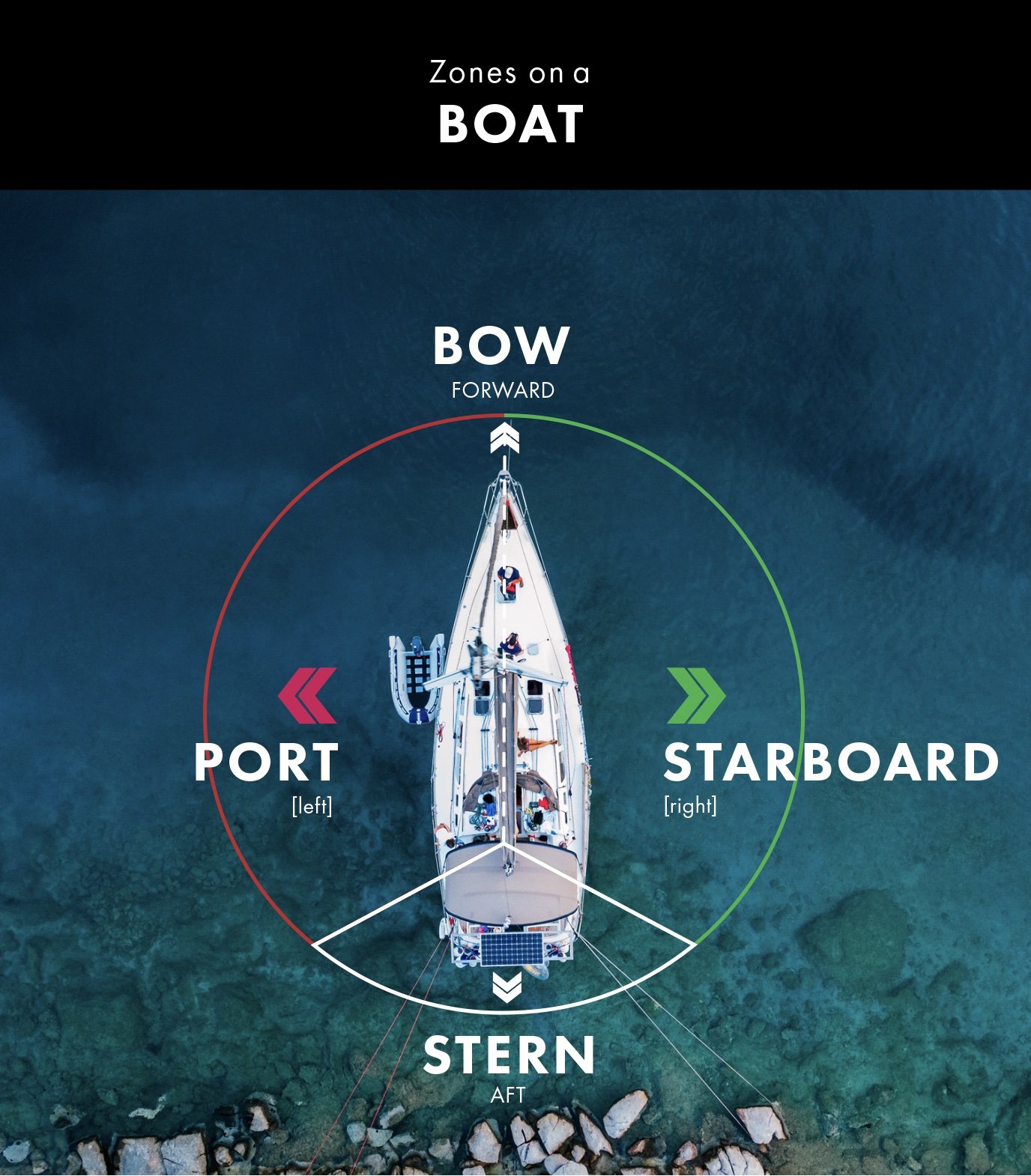
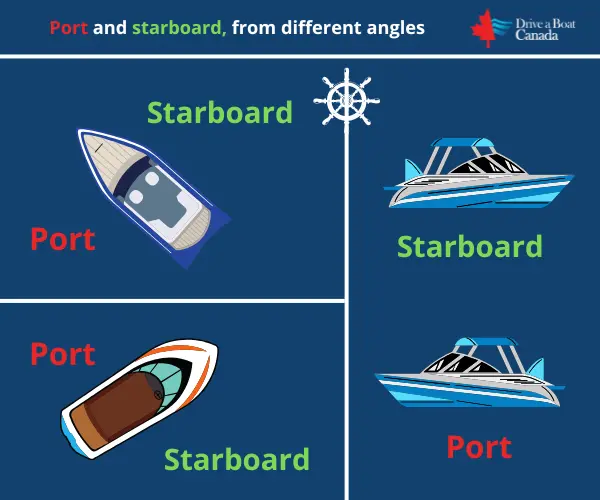
Historically, “port” referred to the side of a ship that would face the dock (the port) when mooring, while “starboard” (derived from “steerboard”) was the side where the steering oar was mounted. These terms became universally adopted because they remain constant relative to the vessel itself. For any vehicle—ship, aircraft, or drone—port is always the left side when looking forward from the stern (rear) towards the bow (front), and starboard is always the right side. This consistency is paramount in aviation, where aircraft may be observed from the ground, from another aircraft, or through onboard camera feeds, each offering a different external perspective. Without a fixed internal reference, command and control could quickly devolve into chaos, especially in complex airspaces or emergency situations.
Avoiding Ambiguity in Dynamic Environments
Imagine a drone executing a complex maneuver, observed by multiple ground crew or even another UAV. If a command or observation were to use “left” or “right” without specifying the drone’s orientation, it could be misinterpreted. “Turn left” for a drone flying towards an observer means one thing, but if the drone is flying away, “turn left” from the observer’s perspective would be “turn right” from the drone’s forward perspective. Port and starboard eliminate this confusion entirely. A command to “adjust port wing down” or an observation “damage reported on starboard propeller” is inherently clear, irrespective of the drone’s current heading, altitude, or the observer’s vantage point. This unambiguous language is crucial for real-time adjustments, formation flying, and coordinated operations involving multiple aerial platforms.
Port and Starboard in Drone Navigation and Control
The principles of port and starboard are deeply embedded in the operational DNA of drones, influencing both human-piloted missions and the sophisticated logic of autonomous flight systems. From the moment a drone lifts off, its internal navigation systems and external controllers constantly process and interpret its orientation relative to these fundamental directions.
Manual Flight and Operator Orientation
For a drone pilot, maintaining an awareness of port and starboard is critical, particularly when the drone is flying at a distance or its nose is not pointed directly away from the pilot. Pilots often rely on visual cues, such as colored lights (red for port, green for starboard), to quickly ascertain the drone’s orientation. This instantaneous identification allows for intuitive control inputs, ensuring that a “left stick” command translates into the intended lateral movement or yaw. Without this fixed reference, piloting could become disorienting, leading to incorrect maneuvers, especially when a drone turns and its “forward” direction no longer aligns with the pilot’s line of sight. Mastery of port and starboard helps pilots develop a mental model of the drone’s position and movement, essential for precision flying, complex maneuvers, and rapid decision-making in unforeseen circumstances.
Autonomous Systems and Internal Referencing
In autonomous flight, the concepts of port and starboard are embedded within the drone’s flight control algorithms and inertial navigation systems (INS). The drone’s onboard computer constantly calculates its current orientation (roll, pitch, yaw) relative to a fixed body frame, where the positive X-axis points forward (bow), the positive Y-axis points to starboard, and the positive Z-axis points downward. All sensor data—from gyroscopes, accelerometers, and magnetometers—are processed relative to this internal frame. When an autonomous system needs to execute a lateral movement or adjust its roll to counteract wind, it does so by calculating the necessary forces and motor speeds based on these intrinsic port and starboard references. For instance, an instruction to “drift starboard” is translated into a precise adjustment of propeller speeds on the port and starboard sides to generate the required thrust vector.
Data Interpretation and Telemetry
Telemetry data, which provides real-time operational information from the drone to the ground control station, also relies on port and starboard definitions. Sensor readings for roll, for example, indicate rotation around the drone’s longitudinal axis, where a positive roll might mean the starboard wing is dipping down, and a negative roll means the port wing is dipping. Similarly, navigational data for obstacle avoidance might report a clear path on the “port side” or a detected object approaching from “starboard front.” Engineers and flight technicians analyzing flight logs or debugging system issues interpret these data points against the immutable port and starboard framework, allowing for accurate reconstruction of flight events and precise identification of system behavior. This standardized nomenclature ensures that all stakeholders, from pilots to software engineers, are speaking the same technical language regarding the drone’s physical state and movement.
Enhancing Safety and Communication Through Standard Terminology
The rigorous adherence to port and starboard terminology extends beyond control inputs; it forms a critical layer in the safety protocols and communication frameworks essential for integrating drones into shared airspaces and ensuring reliable operations. This standardized language minimizes misinterpretations, particularly during high-stress scenarios or multi-party operations.
Collision Avoidance and Airspace Management
In coordinated flight missions or increasingly dense urban air mobility (UAM) environments, drones need to communicate their intentions and react to proximate traffic with absolute clarity. Traffic management systems and drone-to-drone communication protocols often utilize port and starboard to convey collision avoidance maneuvers. A system might issue a directive like “divert two meters starboard” or “traffic identified port side, closing.” Such precise instructions, understood universally, are vital for preventing mid-air collisions. Furthermore, navigation lights—red on the port wingtip, green on the starboard wingtip, and white on the tail—provide a quick visual reference for human observers and other aircraft, allowing them to instantly determine a drone’s orientation and direction of travel, particularly during low-light conditions or beyond visual line of sight (BVLOS) operations.
Training and Operational Protocols
For aspiring drone pilots, understanding port and starboard is a foundational element of flight training. It’s often among the first concepts taught because it underpins all subsequent lessons on maneuverability, orientation, and airspace etiquette. Standardized operational checklists and emergency procedures invariably incorporate these terms to ensure clear, concise, and unambiguous instructions. For instance, an emergency landing procedure might instruct the pilot to “check port landing gear integrity” or “clear starboard area before descent.” This consistent language reduces cognitive load during critical phases of flight, allowing pilots to focus on execution rather than interpretation. It also facilitates interoperability among different drone models and operators, promoting a safer and more predictable operational environment.
Post-Flight Analysis and Incident Reporting
When incidents occur or unusual flight behaviors are observed, accurate reporting and analysis are paramount for continuous improvement and regulatory compliance. Port and starboard serve as objective descriptors in incident reports, accident investigations, and system diagnostics. Instead of vague descriptions like “the left wing dipped,” a report will state “a sudden roll to port was detected,” providing a specific and measurable event. This level of detail allows engineers to accurately simulate the incident, trace system failures, and develop countermeasures. Furthermore, regulatory bodies rely on this standardized terminology to develop consistent safety guidelines and evaluate operational compliance across the diverse spectrum of drone applications, from package delivery to infrastructure inspection and public safety.
The Role of Sensors and Stabilization in Maintaining Orientation
Modern flight technology, particularly in drones, relies heavily on an array of sophisticated sensors and stabilization systems that constantly monitor and correct the aircraft’s orientation, all of which implicitly understand and operate within the port and starboard framework. These systems are the technological bedrock ensuring that an autonomous drone remains perfectly level, or executes a precise turn, maintaining its desired orientation relative to its internal body axes.
Inertial Measurement Units (IMUs)
The heart of a drone’s stabilization system is often the Inertial Measurement Unit (IMU), comprising gyroscopes, accelerometers, and sometimes magnetometers. Gyroscopes measure angular velocity around the drone’s three axes: roll (rotation around the longitudinal, or nose-to-tail, axis), pitch (rotation around the lateral, or wingtip-to-wingtip, axis), and yaw (rotation around the vertical axis). Accelerometers measure linear acceleration along these same axes. When a drone experiences a gust of wind, the IMU detects the resulting change in roll, pitch, or yaw relative to its body frame. The flight controller then uses this data, interpreted within the port and starboard context, to command corrective actions—for example, increasing thrust on the port-side motors to counteract a roll to starboard, thus returning the drone to a level orientation.
GPS and Positional Awareness
While GPS (Global Positioning System) primarily provides absolute positional data (latitude, longitude, altitude), it works in conjunction with IMUs and other sensors to maintain a drone’s spatial awareness. GPS helps the drone determine its global heading, which, when combined with IMU data, allows the flight controller to orient the drone correctly relative to external waypoints and flight paths. For instance, if a drone is programmed to follow a specific track, its internal navigation system uses GPS to know its position on that track, and IMU data to ensure its port and starboard sides are correctly aligned with the desired heading, making necessary adjustments to maintain the flight path with precision.
Visual Positioning Systems (VPS) and Obstacle Avoidance
Visual Positioning Systems (VPS) and optical flow sensors are increasingly common in drones, particularly for precise indoor flight or low-altitude outdoor operations where GPS signals may be weak or unavailable. These systems use downward-facing cameras to track ground patterns, providing highly accurate relative position and velocity data. When combined with IMU data, VPS allows the drone to maintain a stable hover or execute precise lateral movements. For obstacle avoidance, forward, side, and rear-facing vision sensors detect objects. The system identifies an obstacle, for example, “approaching on the port side,” and instructs the flight controller to initiate an evasive maneuver, such as “shift two meters to starboard.” This integration of visual data with the internal port and starboard reference frame enables sophisticated, real-time environmental interaction.
Future Implications for Advanced Flight Technology
As drone technology continues to evolve, the foundational concepts of port and starboard will remain integral, particularly in the development of more complex, autonomous, and integrated air systems. These terms will continue to provide the bedrock for advanced algorithms and collaborative operations.
Swarm Robotics and Collaborative Flight
The future of drone operations often involves swarm robotics, where multiple drones work together to achieve a common goal, such as large-scale mapping, synchronized light shows, or complex search and rescue missions. In such scenarios, precise relative positioning and communication between drones are critical. Commands and status updates within a swarm might specify movements like “drone A, maintain two meters starboard of drone B” or “all drones, execute a synchronized 90-degree turn to port.” The unambiguous nature of port and starboard is essential for maintaining formation, avoiding internal collisions, and ensuring the cohesion and effectiveness of the swarm.
Urban Air Mobility (UAM) Integration
The advent of Urban Air Mobility (UAM), envisioning fleets of autonomous air taxis and delivery drones operating in crowded urban environments, places an unprecedented demand on precise navigation and communication. In this highly regulated and dynamic airspace, every vehicle will need to have an unequivocal understanding of its own orientation and the orientation of surrounding traffic. Air traffic management systems for UAM will rely heavily on port and starboard to issue clear directives for routing, separation, and conflict resolution. Whether it’s automated ground handling systems docking a drone, or an autonomous vehicle communicating its intent to “turn port” into a vertical take-off and landing (VTOL) port, these fundamental directional references will be indispensable for safe, efficient, and scalable aerial operations in the future. The enduring clarity of port and starboard ensures that even the most cutting-edge flight technologies can communicate and operate with universal understanding.