Parameters in coding represent the fundamental building blocks for controlling, configuring, and optimizing the sophisticated algorithms and systems that power modern technological advancements, particularly in the realm of drones and their innovative applications. At their core, parameters are values provided to functions, methods, or scripts that influence their execution and output. They act as adjustable knobs, allowing developers and operators to fine-tune the behavior of complex software without altering the underlying code logic itself. In the context of “Tech & Innovation,” where AI follow modes, autonomous flight, precision mapping, and remote sensing are paramount, understanding and manipulating parameters is not merely a programming detail; it is the key to unlocking adaptability, performance, and operational versatility.
The Foundational Role of Parameters in Software Logic
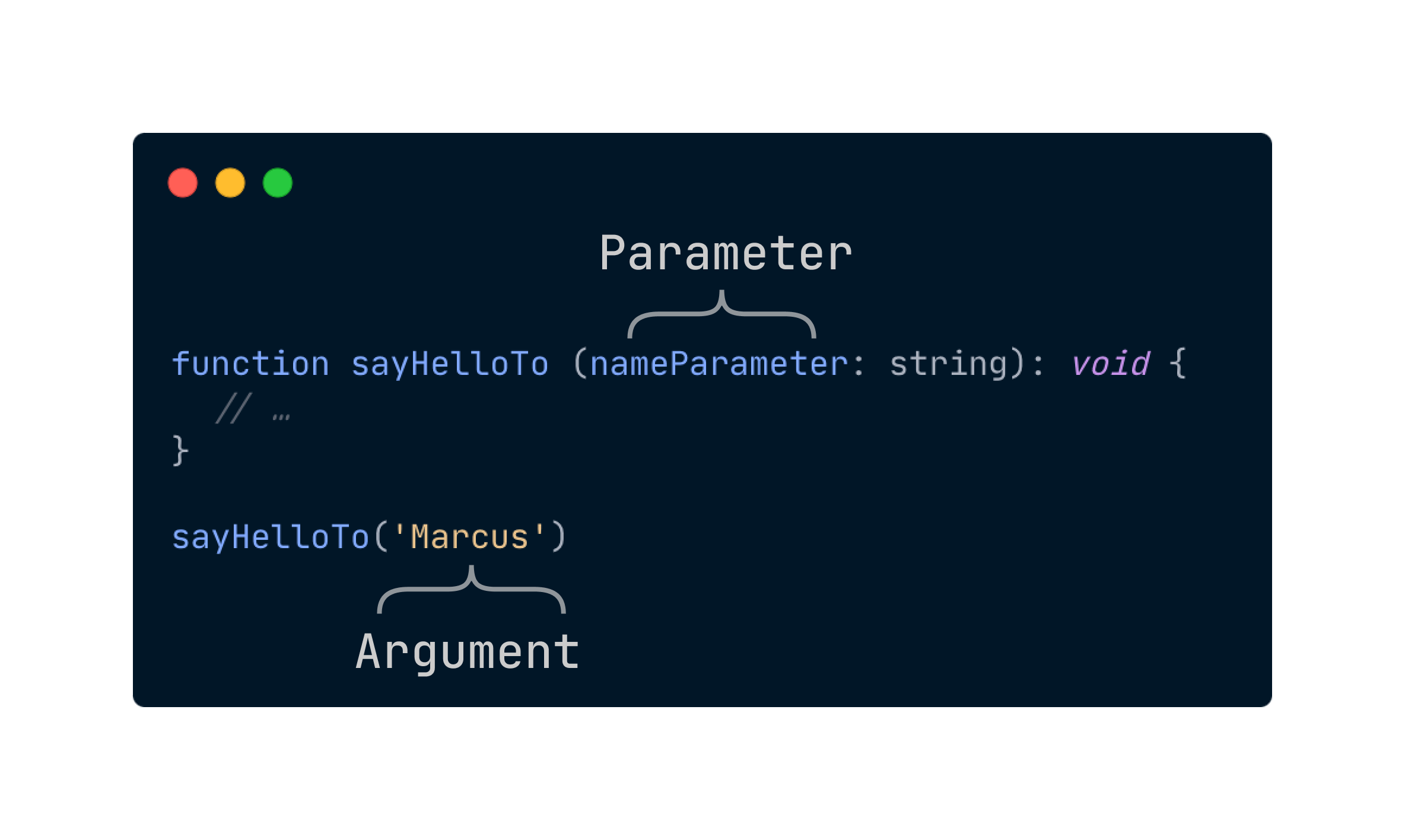
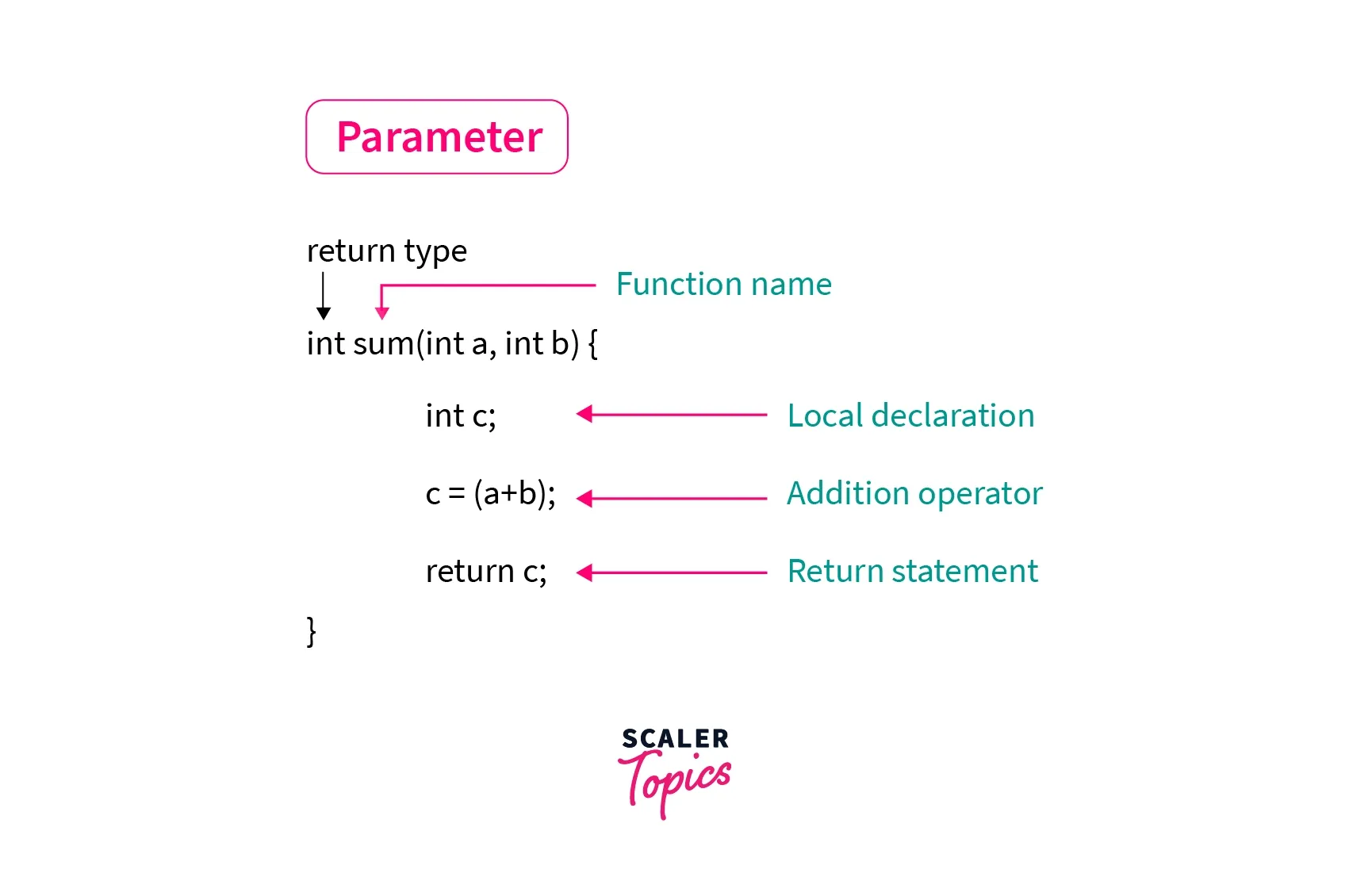
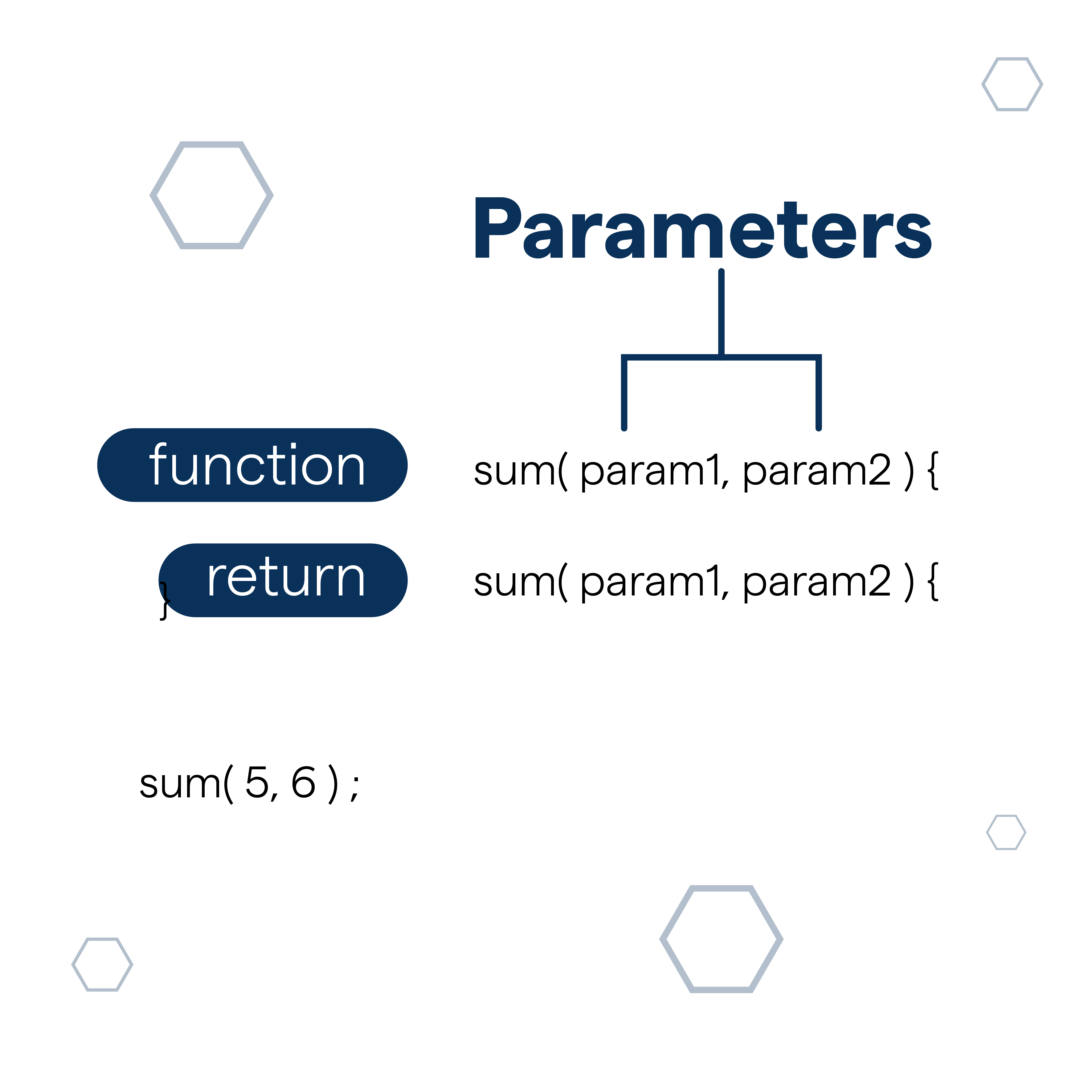
In computer programming, a parameter is a special kind of variable used in a subroutine, function, or method to refer to one of the pieces of data provided as input to the subroutine. These inputs allow the same piece of code to perform different actions or produce different results based on the specific context or requirements. Without parameters, every slight variation in desired behavior would necessitate writing entirely new code, an impractical and inefficient approach for developing flexible and scalable systems.
Consider a simple function designed to make a drone move forward. Without parameters, this function might always move the drone a fixed distance at a fixed speed. With parameters, however, the function can accept distance and speed as inputs. move_forward(distance, speed) then becomes a versatile command where move_forward(10_meters, 5_m/s) yields a different result than move_forward(50_meters, 2_m/s). This fundamental concept scales dramatically when applied to the complex operational stacks of modern drones, where countless variables — from sensor thresholds to navigational waypoints — must be dynamically controlled. Parameters provide the mechanism for this dynamic control, enabling systems to react intelligently to changing environments and mission objectives.
Parameters in Autonomous Flight and Navigation Systems
The sophistication of autonomous drone flight, a cornerstone of “Tech & Innovation,” relies heavily on intelligently configured parameters. Every decision an autonomous drone makes, from maintaining altitude to executing complex maneuvers, is governed by algorithms that process sensor data and react according to predefined and dynamically adjusted parameters.
Waypoint Navigation and Path Planning
For autonomous flight missions, operators define flight paths using waypoints. Each waypoint is characterized by several parameters: latitude, longitude, altitude, and potentially speed, gimbal pitch, and even actions to perform upon arrival (e.g., take a photo). The drone’s flight control system then uses these parameters to calculate the optimal trajectory, manage thrust, and ensure precise adherence to the planned route. Beyond simple waypoints, advanced path planning algorithms employ parameters like maximum turning radius, ascent/descent rates, and acceptable deviation margins to ensure efficient and safe navigation, especially in complex 3D environments. Tunable parameters for path smoothing, obstacle avoidance buffers, and environmental conditions (like wind speed compensation) further refine the drone’s autonomous capabilities, allowing it to adapt to real-world complexities.
Stabilization and Control Systems (PID)
At the heart of any stable drone flight are Proportional-Integral-Derivative (PID) controllers. These algorithms constantly adjust motor speeds to maintain desired attitude, altitude, and position. The “P,” “I,” and “D” gains are classic examples of critical parameters.
- Proportional (P) gain: Determines the response to the current error. A higher P gain makes the drone respond more aggressively to deviations.
- Integral (I) gain: Addresses accumulated error over time, helping the drone correct for persistent drift.
- Derivative (D) gain: Responds to the rate of change of the error, providing damping to prevent overshoots and oscillations.
Proper tuning of these PID parameters is crucial for stable and responsive flight, allowing drones to handle various payloads and environmental conditions. Miscalibrated PID parameters can lead to unstable flight, excessive wobbling, or an inability to maintain position, directly impacting mission success for critical applications like remote sensing or inspection.
Obstacle Avoidance Sensitivity
Modern drones feature advanced obstacle avoidance systems using LiDAR, sonar, or computer vision. The effectiveness and safety of these systems are governed by parameters such as detection range, safe proximity thresholds, and reaction time. For instance, a parameter might dictate how close an obstacle can be before the drone initiates an evasive maneuver, or how sharply it can turn to avoid a collision. Different missions might require different sensitivities; a drone operating in a dense forest might need more aggressive avoidance parameters than one flying over an open field. These parameters allow the drone to be configured for optimal performance in diverse operational scenarios.
Driving Intelligence: Parameters in AI and Machine Learning for Drones
The rise of AI in drone technology, particularly for features like “AI Follow Mode” and intelligent object detection, hinges on the careful design and tuning of parameters within machine learning models and AI algorithms.
AI Follow Mode Configuration
An “AI Follow Mode” allows a drone to autonomously track a subject. This seemingly intuitive behavior is orchestrated by a complex interplay of parameters. These can include:
- Follow Distance: The desired distance the drone should maintain from the subject.
- Follow Angle: The angle relative to the subject (e.g., directly behind, side-on).
- Tracking Speed Thresholds: Maximum and minimum speeds at which the drone will track.
- Target Identification Confidence: A parameter determining how confident the AI must be in identifying the target before initiating or continuing tracking. This prevents false positives.
- Obstacle Prediction Window: How far ahead the AI predicts potential obstacles in the subject’s path to plan smooth evasive maneuvers.
Adjusting these parameters allows operators to tailor the follow behavior for different subjects (e.g., a person walking, a car driving) and environments, from open fields to more complex urban settings, ensuring smooth, cinematic footage or consistent surveillance.
Machine Learning Model Parameters
Within the machine learning models that enable object detection, classification, and predictive analytics on drones, parameters are ubiquitous. These include:
- Hyperparameters: These are parameters that are set before the training process begins, influencing how the model learns. Examples include the learning rate (how much the model adjusts its internal weights with each update), the number of hidden layers in a neural network, the batch size for training data, and the number of training epochs. Optimizing these hyperparameters is a critical step in achieving high performance in tasks like identifying specific assets during an inspection or classifying agricultural health during remote sensing.
- Model Weights/Biases: While often referred to as internal parameters or coefficients, these are learned during the training process. They represent the model’s internal representation of features and patterns in the data, allowing it to make accurate predictions. When a drone uses a pre-trained model for real-time object detection (e.g., identifying power lines for inspection or wildlife for conservation), the performance of that model is a direct result of the values these learned parameters hold.
Tuning hyperparameters is an art and a science, directly impacting the accuracy, speed, and generalization ability of AI features on drones.
Precision and Data: Parameters in Mapping and Remote Sensing
Mapping and remote sensing applications leverage drones to collect vast amounts of data, which is then processed to create detailed 2D maps, 3D models, or provide critical insights. Parameters are vital at every stage, from data acquisition to processing.
Sensor Calibration and Data Acquisition Parameters
Before a mission, sensors on mapping drones are meticulously calibrated. Parameters here might include:
- IMU Calibration Values: Adjustments for accelerometer and gyroscope biases.
- Camera Lens Distortion Parameters: Correcting for optical aberrations in images.
- Thermal Camera Emissivity: A parameter representing how efficiently a surface emits thermal radiation, crucial for accurate temperature readings in thermal inspections.
During data acquisition, mission planning software defines parameters like: - Ground Sampling Distance (GSD): The size of a single pixel on the ground, influencing image resolution and derived accuracy.
- Image Overlap Percentage: The amount of overlap between consecutive and side-by-side images, crucial for robust photogrammetry and 3D model generation.
- Flight Speed and Altitude: Directly affect GSD and image quality, often set as parameters for optimal data capture.
These parameters directly impact the quality and utility of the collected data, determining whether a drone-generated map is suitable for construction planning, agricultural analysis, or environmental monitoring.
Data Processing and Analysis Parameters
Once data is collected, specialized software processes it using algorithms that are also controlled by parameters. For example, in photogrammetry software:
- Keypoint Detection Thresholds: Parameters determining how many distinctive features are extracted from images, influencing the density and accuracy of point clouds.
- Error Tolerance for Bundle Adjustment: How much deviation is acceptable when aligning images and reconstructing 3D geometry.
- Filtering Parameters: For removing noise from point clouds or smoothing surfaces in 3D models.
In remote sensing, analysis algorithms use parameters to classify land cover, detect changes, or quantify specific features. For instance, a parameter might define a spectral threshold for identifying diseased crops, or a specific range of temperatures for detecting hotspots in an industrial inspection. Without the ability to adjust these parameters, the analytical power of drone-collected data would be severely limited, unable to adapt to diverse environments and specific analytical objectives.
In essence, parameters are the connective tissue between abstract algorithms and tangible, real-world drone operations. They imbue drone technology with the flexibility and intelligence required to perform increasingly complex tasks, driving innovation across various industries and ensuring that these advanced systems can be precisely tailored to meet the exacting demands of any mission.