The Foundation of Electrical Understanding in Flight Technology
In the intricate world of flight technology, particularly within the sophisticated electronics that power modern drones, a profound understanding of fundamental electrical principles is not merely advantageous but absolutely essential. Among these principles, Kirchhoff’s Laws stand as cornerstones, providing the theoretical framework necessary to design, analyze, and troubleshoot the complex circuits that enable navigation, stabilization, and overall operational integrity. Named after Gustav Kirchhoff, these two laws—Kirchhoff’s Current Law (KCL) and Kirchhoff’s Voltage Law (KVL)—describe the conservation of charge and energy within electrical circuits, respectively. For engineers crafting the next generation of UAVs, comprehending these laws is akin to understanding the very language of electricity, allowing them to sculpt power delivery, sensor networks, and signal processing systems that are both robust and reliable.
Kirchhoff’s Current Law (KCL) and Drone Power Management
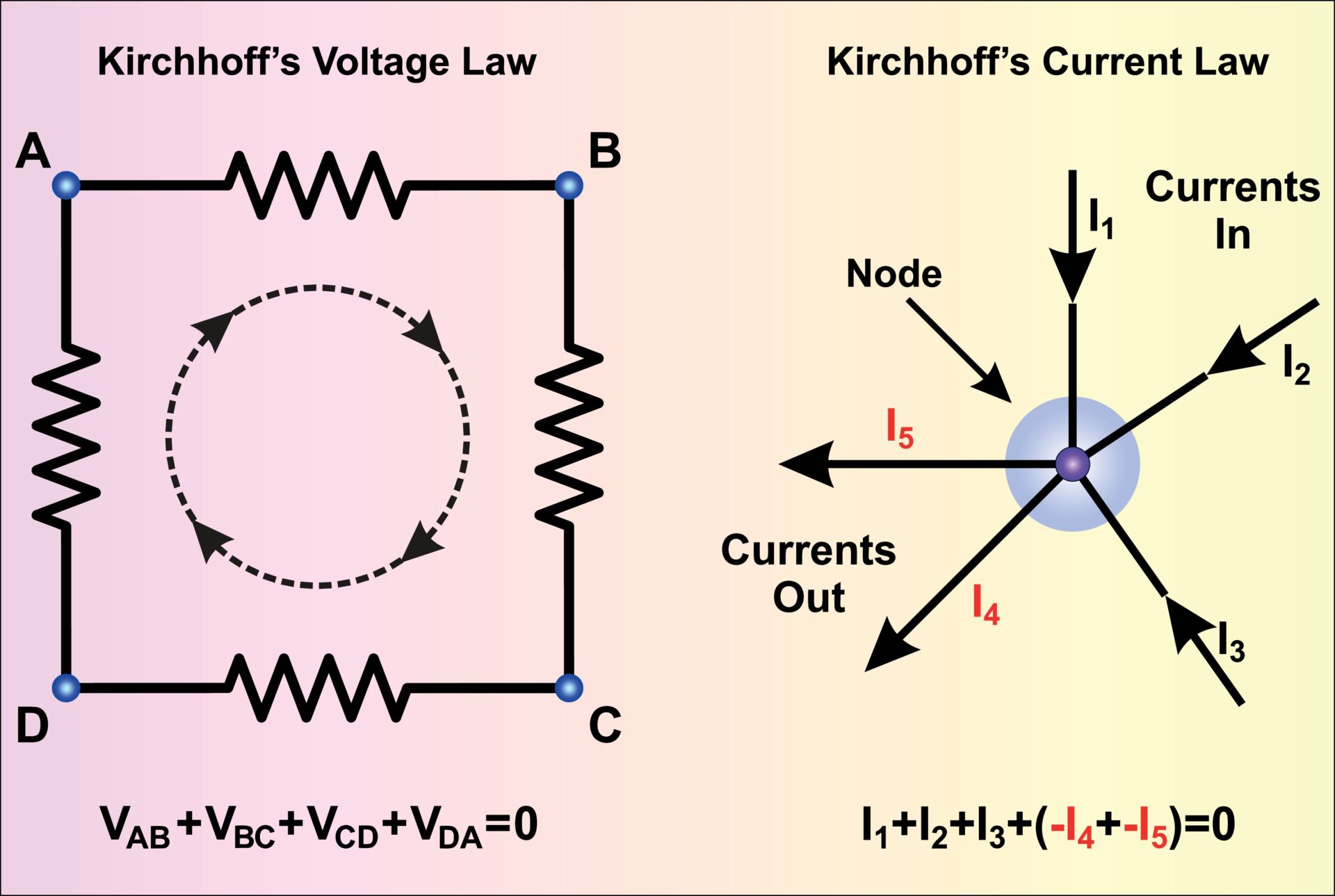
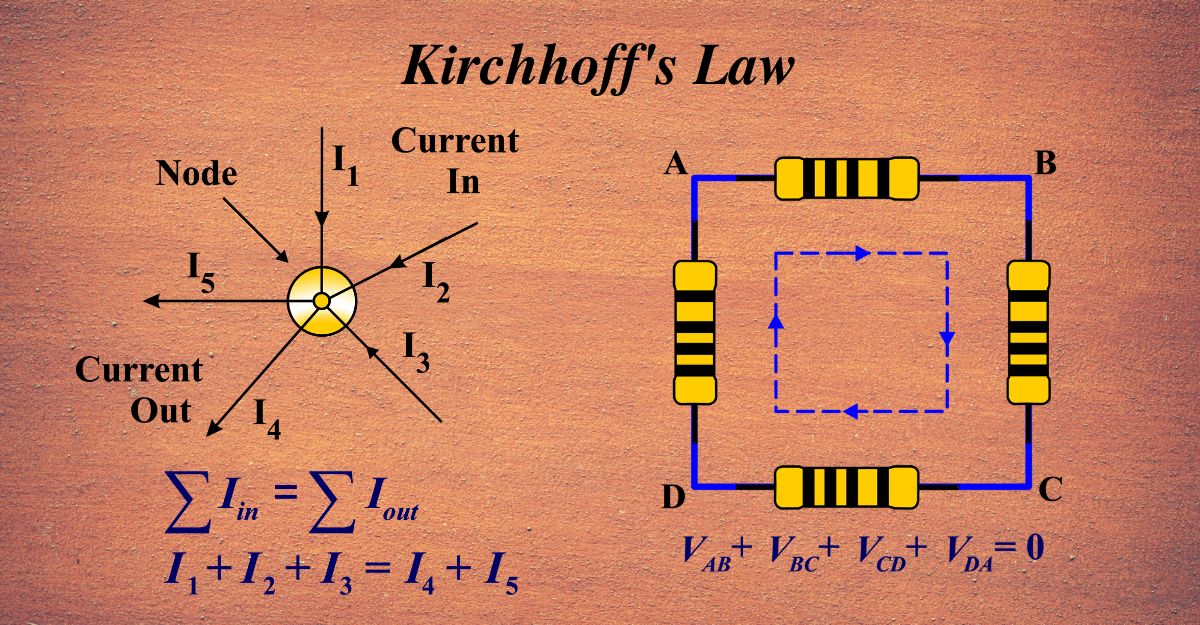
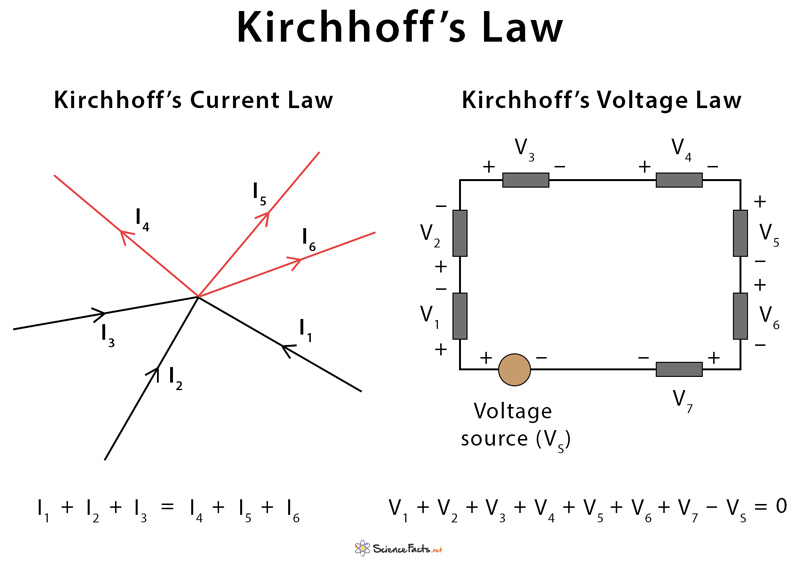
Kirchhoff’s Current Law, often referred to as the junction rule, states that the algebraic sum of currents entering any node (or junction) in an electrical circuit is equal to zero, or, equivalently, the sum of currents entering a node is equal to the sum of currents leaving that node. This law is a direct consequence of the conservation of electric charge. In the context of flight technology, particularly in drones, KCL is paramount for designing efficient and safe power distribution systems.
Battery Distribution and ESCs
A drone’s primary power source, typically a LiPo battery, supplies current to multiple components simultaneously. The most significant current draw comes from the Electronic Speed Controllers (ESCs), which in turn power the brushless motors. A common drone configuration involves a power distribution board (PDB) or an integrated flight controller acting as a central node. From this node, current branches out to each ESC. KCL dictates that the total current drawn from the battery must equal the sum of the currents consumed by all ESCs (and other connected components like the flight controller, GPS module, and video transmitter). Engineers use KCL to size the battery, wiring, and PDB traces correctly, ensuring that each motor receives adequate current under various load conditions (e.g., hovering, rapid ascent, maneuvers) without exceeding the safe operating limits of any component or causing excessive voltage drops. Failure to account for KCL can lead to overloaded wires, component damage, or even catastrophic power failure mid-flight, directly compromising flight stability and safety.
Sensor Networks and Microcontrollers
Beyond propulsion, KCL is also crucial for the internal power management of the flight controller board itself. Modern drones integrate a multitude of sensors—Inertial Measurement Units (IMU) with gyroscopes and accelerometers, barometers for altitude, magnetometers for heading, and GPS receivers for positioning—all requiring precise current delivery. The microcontroller, the brain of the flight controller, also draws current. KCL helps in designing the internal power rails and regulator circuits to ensure that each sensor and the microcontroller receive their specified operating current. This prevents brownouts (momentary drops in voltage due to excessive current draw) that could disrupt sensor readings or restart the microcontroller, both of which would lead to unpredictable and unstable flight behavior.
Preventing Overload and Ensuring Stability
By applying KCL, designers can simulate and predict current flows under various operational scenarios. This allows for the selection of appropriate gauge wiring, the placement of fuses, and the design of robust power planes within printed circuit boards (PCBs). This meticulous design process, guided by KCL, is fundamental to preventing thermal issues, ensuring electrical integrity, and ultimately contributing to the overall stability and reliability of the drone’s flight systems. Without this foundational understanding, designing a multi-rotor system that can effectively manage the dynamic power demands of its motors and complex electronics would be a nearly impossible task.
Kirchhoff’s Voltage Law (KVL) in Drone Stabilization and Navigation
Kirchhoff’s Voltage Law, often called the loop rule, states that the algebraic sum of the voltages around any closed loop in an electrical circuit is equal to zero. This law is a consequence of the conservation of energy, meaning that no energy is created or destroyed as charge moves around a loop. In flight technology, KVL is indispensable for understanding voltage drops, signal integrity, and the proper operation of sensitive electronic components that contribute to stabilization and navigation.
Voltage Rails and Component Compatibility
Drone electronics operate on various voltage levels. For instance, a flight controller might be powered by 5V, while specific sensors might require 3.3V, and the video transmitter could use 9V or 12V. KVL helps engineers design voltage regulator circuits that ensure the correct voltage is supplied to each component. In a closed loop containing the battery, a voltage regulator, and a specific component, KVL ensures that the voltage drop across the regulator plus the voltage drop across the component equals the source voltage (with appropriate polarity considerations). Maintaining these precise voltage rails is critical for the correct operation of microcontrollers, sensors, and communication modules. Any deviation can lead to erroneous sensor data, unreliable processing, or even permanent damage to components, directly impacting stabilization algorithms and navigation accuracy.
Signal Integrity and Sensor Accuracy
The accuracy of a drone’s flight is heavily dependent on the precision of its sensor readings. Gyroscopes and accelerometers in the IMU, for example, output analog or digital signals that represent the drone’s orientation and movement. KVL is vital for understanding how voltage drops across connecting wires and internal resistances within components can affect the integrity of these signals. For analog signals, a voltage drop can directly translate to an inaccurate measurement. For digital signals, significant voltage drops can lead to ‘weak’ signals that are prone to noise, causing misinterpretation by the microcontroller. By applying KVL, engineers can design circuits that minimize unwanted voltage drops in signal paths, ensure stable reference voltages for analog-to-digital converters, and maintain the high fidelity of data transmitted from sensors to the flight controller. This is crucial for precise stabilization algorithms that correct for wind gusts or maintain a level hover.
Troubleshooting and Diagnostics
When a drone exhibits erratic behavior, KVL is an invaluable diagnostic tool. Technicians can use a multimeter to measure voltage drops across different sections of a circuit. If the sum of voltage drops around a loop does not equal zero (considering the source voltage), it indicates a fault—such as a short circuit, an open circuit, a faulty component, or an unintended resistance. For instance, if a sensor is not reporting correctly, KVL can help identify if the issue is a power supply problem (incorrect voltage being supplied), a wiring issue (excessive voltage drop along the signal line), or an internal component failure within the sensor itself. This systematic approach, guided by KVL, is essential for rapid fault isolation and ensuring that the drone’s flight technology remains dependable.
From Theory to Application: Designing Robust Drone Electronics
The theoretical underpinnings of Kirchhoff’s Laws translate directly into practical applications in the design and optimization of drone electronics. Their consistent application ensures that the intricate web of circuits functions cohesively to deliver stable, responsive, and reliable flight.
Circuit Design and Simulation
Engineers extensively use KCL and KVL during the circuit design phase. Before any physical prototype is built, sophisticated simulation software employs these laws to model current and voltage distributions throughout the drone’s electronic systems. This allows designers to identify potential bottlenecks, predict component stress points, and optimize circuit layouts for efficiency and thermal management. By virtually testing various configurations and load conditions, engineers can refine power distribution networks, sensor interfaces, and control signal paths, ensuring that the final design meets stringent performance and safety requirements for flight.
Redundancy and Reliability
In critical flight systems, redundancy is often incorporated to enhance reliability. This might involve dual power supplies, multiple IMUs, or redundant communication links. KCL and KVL are fundamental in designing these redundant architectures. For instance, when designing redundant power paths, KCL ensures that if one path fails, the remaining paths can safely carry the necessary current without overloading. Similarly, KVL guides the design of power selection circuits that can seamlessly switch between power sources while maintaining stable voltage levels for continuous operation, thereby preventing flight interruptions due to single points of failure.
Miniaturization and Efficiency
The continuous drive in drone technology towards smaller, lighter, and more efficient platforms relies heavily on an expert understanding of electrical laws. KCL and KVL enable engineers to optimize power conversion efficiencies, minimize quiescent currents, and design compact yet robust power delivery and signal processing circuits. By understanding how currents divide and voltages drop in increasingly smaller traces and component packages, designers can reduce power losses, extend flight times, and pack more computational power into tighter spaces, directly contributing to the performance and utility of micro drones and advanced UAVs.
The Indispensable Principles for Advanced Flight Technology
In conclusion, Kirchhoff’s Current Law and Kirchhoff’s Voltage Law are not mere academic concepts; they are indispensable tools that underpin virtually every aspect of a drone’s electrical and electronic systems. From the fundamental distribution of power to the precise collection of sensor data for stabilization and navigation, these laws guide the hand of every engineer striving to push the boundaries of flight technology. Their enduring relevance ensures that as drones become more autonomous, more capable, and more integrated into our lives, the core principles governing their electrical heartbeats remain robust, predictable, and fully understood. Without a thorough application of KCL and KVL, the sophisticated aerial maneuvers, the precise obstacle avoidance, and the reliable autonomous flights that define modern drone capabilities would simply not be possible. They are, quite literally, the current and voltage of innovation in flight technology.