The force of buoyancy is a fundamental principle in fluid dynamics, a critical concept for understanding how objects behave when submerged or partially submerged in a fluid, whether that fluid is water, oil, or even air. In the realm of flight technology, while often overshadowed by aerodynamic lift for winged aircraft and propeller-driven drones, buoyancy plays a direct and vital role in the design and operation of specific aerial platforms, particularly those designed for long endurance or specialized atmospheric sensing, and is absolutely paramount for any technology operating underwater. Understanding this force is essential for engineers developing systems that navigate and operate within fluid environments.

The Archimedes Principle: Foundation of Buoyancy
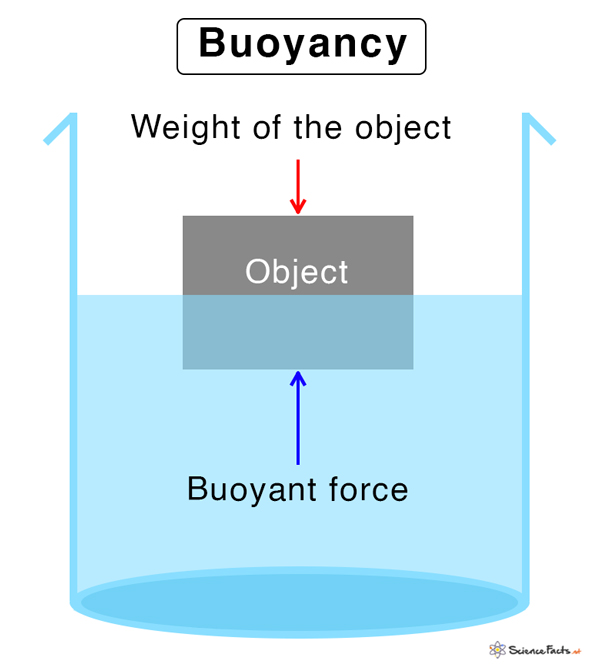
At its core, the force of buoyancy is an upward force exerted by a fluid that opposes the weight of an immersed object. This principle was famously articulated by Archimedes, an ancient Greek mathematician, who stated that any object, wholly or partially immersed in a fluid, is buoyed up by a force equal to the weight of the fluid displaced by the object. This simple yet profound insight underpins the design of ships, submarines, hot air balloons, and indeed, many advanced flight technologies.
Understanding Fluid Displacement
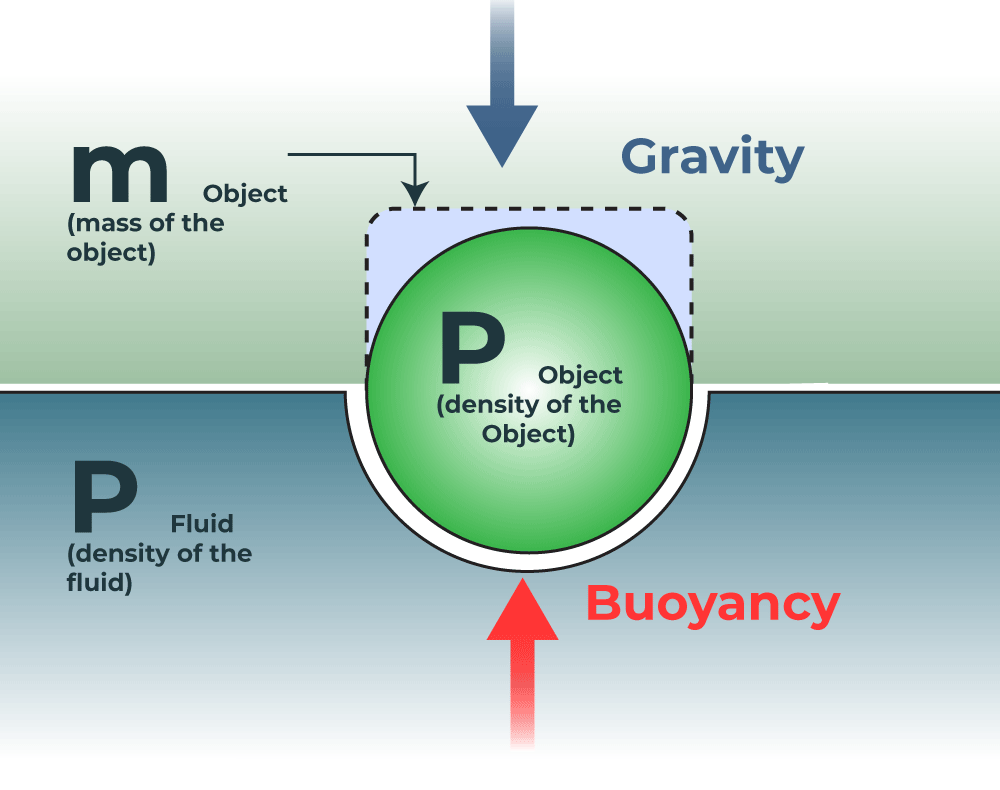
When an object is placed into a fluid, it pushes aside, or displaces, a certain volume of that fluid. The amount of fluid displaced is directly related to the volume of the object submerged. For an object to float, the buoyant force must be equal to or greater than its total weight. If the buoyant force is less than the object’s weight, it will sink. The weight of the displaced fluid is calculated by multiplying its volume by its density and the acceleration due to gravity (Weight = Volume × Density × Gravity). Therefore, a larger volume of displaced fluid, or a denser fluid, will result in a greater buoyant force. This relationship explains why a massive steel ship floats (it displaces a vast volume of water), while a small steel pebble sinks (it displaces very little water relative to its own density).
Factors Influencing Buoyant Force
Several key factors determine the magnitude of the buoyant force. Firstly, the density of the fluid is paramount. Denser fluids exert a greater buoyant force for a given volume of displacement. This is why it’s easier to float in saltwater than in freshwater, and why helium balloons rise in air. Secondly, the volume of the displaced fluid directly correlates with buoyancy. A larger submerged volume means more displaced fluid and thus greater buoyant force. Lastly, the acceleration due to gravity is a constant factor that influences the weight of the displaced fluid. In the context of flight technology, these factors guide decisions on material selection, structural design, and operational environments to achieve desired buoyancy characteristics.
Buoyancy in Aerial Systems: Beyond Traditional Lift
While most quadcopters and fixed-wing drones rely on dynamic lift generated by propellers or wings moving through the air, buoyancy is not entirely absent from aerial flight technology. For certain specialized platforms, particularly those designed for extended endurance or static positioning, buoyancy becomes the primary mechanism for staying aloft.
Lighter-than-Air Flight Technology (Aerostats and Blimps)
Lighter-than-air (LTA) vehicles, such as aerostats, blimps, and airships, are the quintessential examples of flight technology that harness buoyancy. These platforms achieve lift by displacing a volume of air with a gas that is less dense than the surrounding air (e.g., helium or hot air). The buoyant force generated by this displaced air counters the weight of the entire vehicle, allowing it to float. Modern aerostats are used as persistent surveillance platforms, communication relays, and environmental monitoring stations, often operating at high altitudes for days, weeks, or even months. Their ability to remain airborne with minimal energy expenditure, primarily relying on buoyancy, makes them incredibly efficient for long-duration missions where traditional powered flight would be prohibitively expensive or complex. Flight technology in this domain focuses on envelope materials, gas management systems, and hybrid propulsion units for station-keeping and maneuvering against winds.
Apparent Weight and Air Density Considerations for Drones
Even for heavier-than-air (HTA) drones like quadcopters, the concept of buoyancy is subtly present. Every object submerged in air experiences an upward buoyant force equal to the weight of the air it displaces. While this force is negligible compared to the lift generated by propellers for typical drones, it still technically reduces the object’s apparent weight. As air density decreases with altitude, the buoyant force also slightly decreases, meaning the drone’s apparent weight effectively increases at higher altitudes. This subtle change, coupled with the reduced air density affecting propeller efficiency, contributes to the overall performance envelope of a drone and must be considered in precise flight dynamics models, especially for high-altitude operations or very sensitive payloads. Advanced flight controllers and navigation systems must compensate for these environmental variables to maintain stable flight and precise positioning.
Submersible Technology and Buoyancy Control
When considering “flight” in a fluid, underwater vehicles represent a significant application where buoyancy is not just a factor but the absolute core of their operational technology. Unmanned underwater vehicles (UUVs), including remotely operated vehicles (ROVs) and autonomous underwater vehicles (AUVs), rely heavily on precise buoyancy control for depth management, stability, and efficient movement.
Ballast Systems and Depth Management
Submersible flight technology employs sophisticated ballast systems to manipulate buoyancy. These systems typically involve tanks that can be filled with water (to increase overall density and sink) or emptied by pumping out water and replacing it with air (to decrease density and rise). By carefully controlling the amount of water in these tanks, engineers can achieve neutral buoyancy, where the vehicle’s overall density matches that of the surrounding water, allowing it to “fly” or hover at a specific depth with minimal energy expenditure. For ROVs and AUVs, this precise depth control is critical for tasks such as oceanographic research, underwater infrastructure inspection, search and rescue operations, and military applications.
The Role of Buoyancy in ROVs and AUVs
ROVs and AUVs are designed with a specific level of inherent buoyancy, often slightly positive to ensure they float to the surface in case of power failure. Their flight technology then utilizes thrusters for horizontal and vertical movement, while the ballast system fine-tunes their buoyancy to achieve stable depth keeping. AUVs, designed for long-duration missions without human intervention, often incorporate advanced buoyancy engines that can subtly change the vehicle’s volume or displace small amounts of fluid to alter buoyancy, allowing them to glide through the water column using very little energy, making them ideal for persistent environmental monitoring or mapping vast areas of the ocean floor. The intelligent integration of sensors (pressure, sonar), actuators (thrusters, ballast pumps), and control algorithms constitutes the sophisticated flight technology enabling these vehicles to navigate complex underwater environments.
Advanced Buoyancy Concepts and Future Flight
Beyond existing applications, the principles of buoyancy continue to inspire innovation in advanced flight technology, pushing boundaries for endurance, efficiency, and novel operational capabilities.
Hybrid Buoyant-Aerodynamic Designs
The combination of buoyant lift with aerodynamic lift offers intriguing possibilities for future flight platforms. Hybrid airships, for instance, utilize both buoyant gas (like helium) for primary lift and aerodynamic wing shapes or propulsive thrust to generate additional dynamic lift. This hybrid approach allows for greater payload capacity, more efficient flight at higher speeds than traditional blimps, and potentially longer endurance than conventional aircraft. Such designs are being explored for heavy-lift cargo transport, high-altitude persistent platforms, and even stratospheric tourist vehicles, blending the energy efficiency of buoyancy with the maneuverability and speed of aerodynamic flight. Integrating these two distinct lift generation mechanisms demands sophisticated control systems to manage the transition between flight regimes and optimize performance across varying conditions.
Energy Efficiency and Extended Endurance
One of the most compelling advantages of harnessing buoyancy in flight technology is the potential for vastly improved energy efficiency and extended endurance. Unlike propulsion systems that continuously expend energy to counteract gravity, buoyant lift, once established, requires minimal ongoing energy input to maintain altitude or depth. This characteristic is invaluable for missions requiring prolonged presence in a specific area, such as environmental monitoring, climate research, or surveillance. Future flight systems, whether aerial or submersible, will increasingly leverage sophisticated buoyancy management systems, potentially incorporating variable-volume structures, phase-change materials, or even “bio-inspired” mechanisms to dynamically adjust buoyancy for optimal energy use and unprecedented operational durations.
Measuring and Managing Buoyancy in Flight Technology
The successful implementation of buoyancy-based flight technology hinges on precise measurement and dynamic management of forces. Sensors play a critical role, with pressure sensors providing accurate depth or altitude data, and accelerometers and gyroscopes contributing to stability and orientation. For LTA vehicles, precise monitoring of gas pressure and temperature within the envelope is crucial for maintaining optimal lift. In submersibles, highly accurate depth sensors are fundamental for controlling ballast systems and ensuring safe operation.
Control systems in buoyant flight technology are designed to integrate data from these sensors, making real-time adjustments to achieve desired states. This can involve automatically actuating ballast pumps, adjusting heating elements in hot air balloons, or modulating thruster output to compensate for environmental changes or payload variations. The algorithms driving these systems are complex, accounting for fluid density variations (e.g., air temperature and pressure, water salinity and temperature), vehicle dynamics, and mission parameters. The continuous evolution of these measurement and management technologies is paving the way for more autonomous, efficient, and versatile platforms that can operate effectively across diverse fluid environments, embodying the true spirit of advanced flight technology.