Behavioral psychology, at its core, is the scientific study of observable behavior and its relationship to environmental stimuli. It posits that all behaviors are learned through interaction with the environment, and can be modified or shaped through processes such as conditioning. While traditionally applied to human and animal subjects, the fundamental principles of understanding, predicting, and influencing behavior find fascinating and increasingly relevant parallels in the rapidly evolving world of advanced drone technology and innovation. In this niche, understanding “behavior” extends beyond organic entities to encompass the intricate actions, reactions, and adaptive capabilities of autonomous systems. The very essence of modern drone technology—its capacity for autonomous flight, intelligent navigation, and adaptive interaction—can be dissected through a lens informed by behavioral principles, particularly in areas like artificial intelligence, machine learning, and human-machine interaction.

Foundations in Autonomous Systems
The conceptual underpinnings of behavioral psychology offer a powerful framework for designing and understanding the “behavior” of autonomous drones. When we speak of a drone’s capacity to learn, adapt, and make decisions, we are, in essence, describing its behavioral repertoire. The intricate algorithms that govern a drone’s flight path, its response to dynamic environments, and its ability to achieve complex objectives are all manifestations of programmed and learned behaviors, influenced by digital “stimuli” and internal “reinforcements.”
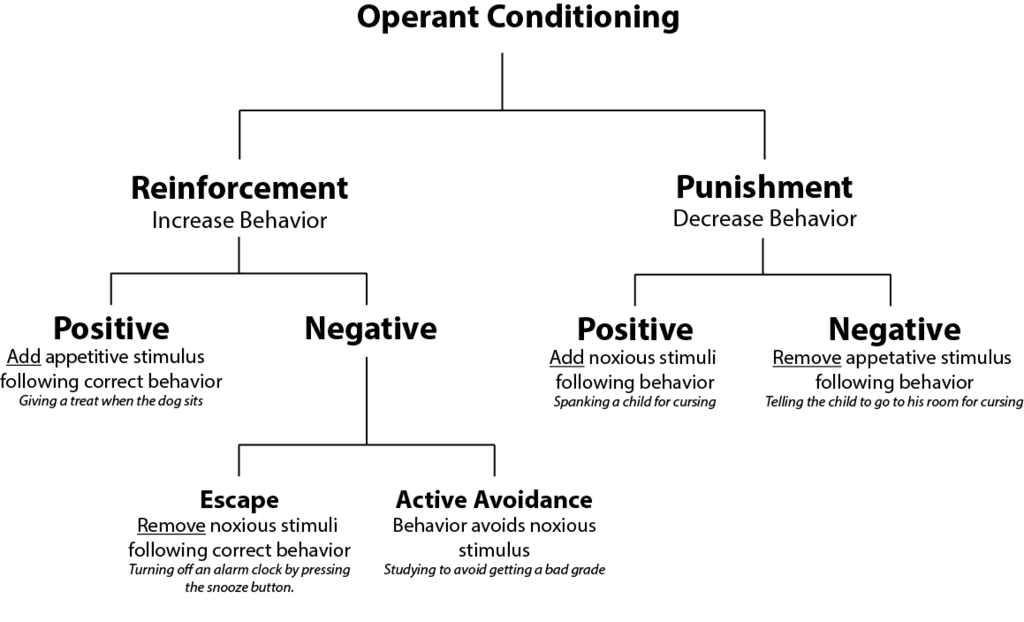
Reinforcement Learning and Operant Conditioning
One of the most direct parallels between behavioral psychology and drone technology lies in the field of reinforcement learning (RL) within artificial intelligence. RL algorithms are explicitly inspired by operant conditioning, a key concept in behavioral psychology. Just as an animal learns to perform a trick to receive a reward, an autonomous drone utilizing RL learns optimal flight paths or action sequences by receiving “rewards” for desired outcomes (e.g., reaching a target, avoiding a collision, completing a mapping task efficiently) and “punishments” for undesirable ones. This process enables drones to develop complex, adaptive behaviors without explicit pre-programming for every conceivable scenario. For instance, a drone trained to navigate a dense forest might initially crash frequently, but through reinforcement learning, it incrementally refines its movements, learning which actions in specific environmental contexts lead to successful navigation and which lead to failure, ultimately developing highly sophisticated “evasion behaviors.”
Stimulus-Response in Drone Navigation
The fundamental behavioral concept of stimulus-response is central to drone navigation and control systems. A drone’s sensors act as its “sensory organs,” detecting environmental stimuli such such as proximity to obstacles, changes in wind speed, GPS signals, or visual cues. The drone’s onboard processing unit then interprets these stimuli and triggers a “response”—an adjustment in motor speed, a change in direction, an alteration in altitude. For example, a sudden drop in ambient light (stimulus) might trigger the drone’s cameras to adjust aperture or switch to night vision mode (response). Similarly, the detection of a tree branch via lidar (stimulus) immediately initiates a maneuver to bypass it (response). The reliability and sophistication of these stimulus-response loops are critical for safe, efficient, and autonomous operation, forming the bedrock of a drone’s observable “behavior” in the physical world.
Predictive Analytics and Drone Autonomy
Advanced drone systems leverage predictive analytics not merely to react to current conditions but to anticipate future states, a capability that mirrors the predictive power of understanding learned behaviors. This proactive approach enables true autonomy, where drones can make informed decisions based on patterns, probabilities, and learned environmental models, rather than solely relying on real-time sensory input.
Mapping Behavioral Patterns for Smart Flight
Remote sensing and mapping capabilities of drones extend beyond mere data collection; they involve the creation of dynamic, predictive models of environments. For example, in precision agriculture, drones map fields to identify areas of stress, inferring the likely “behavior” of crops under various conditions (e.g., predicted yield, vulnerability to disease). In urban planning, drones map traffic patterns, predicting congestion and optimizing delivery routes. This is analogous to a behavioral psychologist mapping environmental variables and past actions to predict future human behavior. For drones, mapping isn’t just about what is, but what will be, allowing them to adapt their flight paths and operational strategies based on learned environmental “behaviors”—such as anticipating wind currents in mountainous terrain or predicting the movement of objects in a dynamic environment.
Obstacle Avoidance as a Behavioral Response
Obstacle avoidance systems are perhaps one of the clearest demonstrations of complex behavioral responses in drones. These systems combine multiple sensors (ultrasonic, infrared, lidar, vision cameras) to create a real-time, 3D map of the drone’s surroundings. The “behavioral” aspect here lies in the drone’s capacity to not just detect an obstacle (stimulus) but to evaluate its trajectory, speed, and potential impact, and then execute an intelligent evasive maneuver (response) that maintains the mission objective. Advanced obstacle avoidance systems don’t just stop; they learn preferred evasion patterns, adapt to different types of obstacles, and even anticipate the movement of dynamic obstacles like birds or other aircraft, essentially developing a repertoire of learned “avoidance behaviors.” This requires a deep understanding of spatial relationships and real-time decision-making, allowing the drone to “behave” safely and efficiently in cluttered or unpredictable environments.
Human-Drone Interaction: Shaping User Experience
The interface between human operators and autonomous drones is another critical area where behavioral psychology principles implicitly guide design and functionality. The goal is to create intuitive, effective, and safe interactions, influencing how humans perceive, trust, and ultimately utilize these complex machines. Understanding human “behavioral tendencies” helps engineers design drones that respond predictably and provide feedback that humans can easily interpret.
Intuitive Controls and Cognitive Load
Just as behavioral psychologists study how environmental design influences human actions, drone designers strive to create control interfaces that minimize cognitive load and leverage human behavioral patterns for ease of use. Features like “AI Follow Mode” are designed to mimic human perception and prediction of movement, allowing the drone to “behave” in a way that feels natural and intuitive to the user. Gesture control, voice commands, and simplified app interfaces all reduce the learning curve by aligning drone operations with pre-existing human behaviors and cognitive processes. The drone’s “behavior”—its responsiveness, smoothness of movement, and feedback mechanisms—directly shapes the user’s experience and their willingness to integrate the technology into their workflows.
Ethical Considerations in Autonomous Decision-Making
As drones become more autonomous, ethical considerations surrounding their “behavioral” choices become paramount. Behavioral psychology explores the moral and ethical dimensions of human actions, and similar questions arise when drones are programmed to make decisions with significant consequences, particularly in scenarios involving potential harm or property damage. For example, in an unavoidable collision scenario, how should an autonomous drone “behave”? Should it prioritize the drone’s integrity, public safety, or property? These are not purely technical questions but involve programming “ethical behaviors” based on societal values, drawing parallels to the complex moral reasoning studied in behavioral ethics. The transparency and explainability of a drone’s decision-making “behavior” are crucial for building public trust and ensuring accountability in an increasingly automated world.
The Future of Drone Behavior: Learning and Adaptation
The trajectory of drone innovation is moving towards increasingly sophisticated and adaptive “behavioral” capabilities, pushing the boundaries of what autonomous systems can achieve. The ultimate goal is to create drones that not only react to their environment but actively learn, evolve, and self-optimize their behaviors over time, mimicking complex biological learning processes.
Self-Correction and Evolving Flight Paths
Future drones will exhibit enhanced self-correction and adaptive behaviors, moving beyond pre-programmed responses to genuinely evolving strategies. This involves continuous learning from experiences, where the drone refines its internal models of the world and its own operational capabilities. For instance, a drone deployed for persistent surveillance in a dynamic environment might learn to anticipate changes in patrol routes based on observed patterns, or adapt its flight parameters to compensate for unforeseen structural weaknesses in its own components. This continuous “behavioral adaptation” makes drones more resilient, efficient, and capable of operating in highly unpredictable circumstances without constant human intervention.
Swarm Intelligence and Collective Behavior
Perhaps one of the most exciting areas where behavioral principles intersect with drone technology is in the development of swarm intelligence. Inspired by the collective behaviors observed in insect colonies or bird flocks, drone swarms are designed to operate as a single, cohesive unit, with individual drones exhibiting simple local behaviors that collectively achieve complex global objectives. Each drone in a swarm observes the “behavior” of its neighbors and adjusts its own actions accordingly, leading to emergent patterns like coordinated search, mapping, or even construction. This collective “behavioral psychology” of interconnected autonomous units promises to unlock unprecedented capabilities for efficiency, redundancy, and scalability in various applications, representing a pinnacle of designed and emergent behavioral complexity in technological systems.