Geometry, at its core, is the study of shapes, sizes, relative positions of figures, and the properties of space. While it might seem like an abstract mathematical discipline, its meaning and application within drone technology and innovation are profoundly concrete, forming the bedrock upon which sophisticated aerial systems navigate, perceive, and interact with the world. For drones, geometry isn’t just a concept; it’s the fundamental language that enables autonomous flight, precise mapping, intelligent AI functions, and advanced remote sensing capabilities. Without a deep understanding and rigorous application of geometric principles, the advanced tech and innovation we see in modern UAVs would be impossible.
The Foundational Role of Geometry in Drone Operations
Every aspect of a drone’s existence, from its physical design to its most complex autonomous behaviors, is governed by geometric principles. It’s the framework that allows a drone to understand where it is, where it’s going, and what surrounds it.
Defining Space and Position
At the most basic level, a drone operates within a three-dimensional Cartesian coordinate system. Its position in space is defined by X, Y, and Z coordinates. Geometry provides the tools to establish these coordinates relative to a global reference (like GPS) or a local one (like a home point). This foundational understanding of position is critical for any form of navigation or data collection. Whether a drone is flying a predefined grid pattern for mapping or maintaining a safe distance from an object, its ability to pinpoint its exact location and target position is a direct application of geometric understanding. Algorithms constantly calculate distances, vectors, and trajectories based on these spatial coordinates, ensuring accuracy and repeatability.
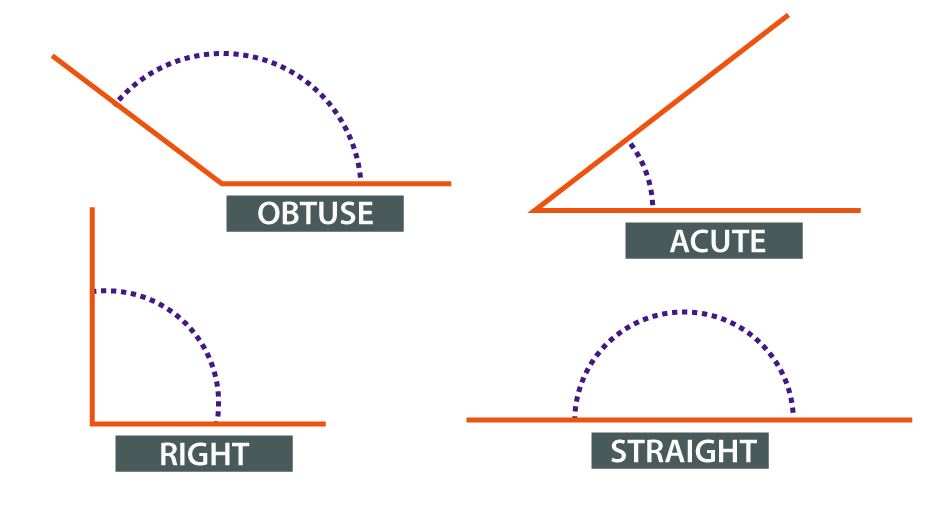
Orientation and Attitude
Beyond mere position, a drone’s orientation—its attitude—is equally crucial. This refers to its pitch (nose up/down), roll (wing up/down), and yaw (nose left/right) angles. These rotational movements are fundamentally geometric, described using quaternions, Euler angles, or rotation matrices. Sensors like accelerometers, gyroscopes, and magnetometers feed data into complex geometric algorithms that continuously estimate and correct the drone’s attitude. Maintaining a stable attitude is paramount for smooth flight, precise camera shots, and accurate sensor readings. For instance, an IMU (Inertial Measurement Unit) uses geometric transformations to translate raw sensor data into meaningful orientation information, which is then used by flight controllers to adjust motor speeds and maintain stability.
Geometry’s Impact on Autonomous Flight and Navigation
The leap from human-piloted drones to fully autonomous systems is almost entirely attributable to advanced geometric computing. Navigation, avoidance, and mapping all hinge on the drone’s ability to interpret its surroundings geometrically.
Path Planning and Trajectory Optimization
Autonomous drones require the ability to plan their own routes from a starting point to a destination, often while avoiding obstacles and adhering to specific flight parameters (e.g., altitude, speed). This involves complex geometric calculations to define the optimal trajectory. Algorithms use geometric graphs, Bezier curves, or spline interpolation to generate smooth, energy-efficient, and collision-free paths. For complex missions, drones might perform 3D path planning, considering terrain elevation, restricted airspace, and dynamic no-fly zones. The ability to predict future positions and movements based on current velocity and acceleration vectors is a geometric problem that needs real-time solutions for fluid autonomous flight.
Obstacle Detection and Avoidance
One of the most critical safety features in modern drones is obstacle detection and avoidance, which is a highly geometric task. Lidar, radar, and stereoscopic cameras capture environmental data, forming a 3D point cloud or depth map. Geometric algorithms then process this data to identify obstacles—their shape, size, and distance—and predict potential collisions. By creating geometric representations of both the drone and its surroundings, the system can determine safe flight corridors and execute avoidance maneuvers, geometrically re-planning the path in real-time. This involves calculating vectors, angles, and distances to maintain safe separation from static and dynamic objects.
SLAM (Simultaneous Localization and Mapping)
SLAM is a prime example of advanced geometric computation in action. For drones operating in environments where GPS is unavailable or unreliable (e.g., indoors, under bridges), SLAM allows the drone to simultaneously build a map of its surroundings and localize itself within that map. This involves intricate geometric matching of features observed from different viewpoints, using techniques like feature extraction, triangulation, and bundle adjustment. The drone continuously updates its position and orientation relative to the evolving geometric map, creating a robust understanding of its environment without external positioning signals. This capability is fundamental for future indoor inspections, search and rescue in complex structures, and highly precise industrial automation.
Geometric Principles in Mapping and Remote Sensing
Drones have revolutionized mapping and remote sensing, turning complex tasks into efficient, high-resolution operations, all powered by geometric precision.
Photogrammetry and 3D Model Reconstruction
Photogrammetry, the science of making measurements from photographs, is inherently geometric. Drones capture overlapping images of a target area from various perspectives. Geometric algorithms then analyze these images to identify common points (tie points), calculate the drone’s camera position and orientation at the time of each shot, and then triangulate the 3D coordinates of every pixel. This process creates dense point clouds, digital elevation models (DEMs), and highly accurate 3D mesh models of real-world objects and landscapes. The accuracy of these 3D reconstructions relies heavily on the geometric precision of the camera calibration, flight path planning, and the computational algorithms used to process the visual data.
Geographic Information Systems (GIS) Integration
Once 3D models and orthomosaics (geometrically corrected aerial images) are generated from drone data, they are often integrated into Geographic Information Systems (GIS). GIS platforms rely on sophisticated geometric databases to store, analyze, and visualize spatial data. Drone-derived maps, complete with geometric attributes like property boundaries, building footprints, and terrain contours, become layers in a GIS. This enables powerful spatial analysis, allowing users to measure areas, distances, volumes, and slopes with high precision. Geometry provides the language for integrating diverse datasets and performing complex spatial queries.
Volumetric Calculations and Analysis
For industries like construction, mining, and agriculture, drones offer unprecedented capabilities for volumetric calculations. By generating detailed 3D models of stockpiles, excavation sites, or crop fields, geometric algorithms can precisely measure volumes. This involves creating a digital terrain model (DTM) or digital surface model (DSM) and then performing geometric subtraction or integration to determine the volume of material above or below a certain plane. This application of geometry provides accurate, cost-effective, and regular insights into inventory, progress, and resource management.
Advanced Geometric Applications in AI and Computer Vision
The intersection of AI, computer vision, and drones is rich with geometric challenges and innovative solutions, pushing the boundaries of what these autonomous systems can achieve.
Object Recognition and Tracking
AI-powered object recognition in drones uses geometric features to identify objects in real-time. Algorithms detect geometric patterns, shapes, and textures within camera feeds to classify objects (e.g., vehicles, people, specific infrastructure). Once an object is recognized, geometric tracking algorithms follow its movement. This often involves predicting the object’s next position based on its current velocity and direction, a geometric extrapolation, and then adjusting the drone’s own position to maintain focus. This is critical for surveillance, search and rescue, and industrial inspection tasks where specific targets need continuous monitoring.
AI Follow Modes and Predictive Movement
AI follow modes are a testament to advanced geometric integration. A drone equipped with this feature can autonomously follow a moving subject, maintaining a consistent distance and angle. This requires real-time geometric calculation of the target’s position, velocity, and predicted trajectory relative to the drone. The drone’s flight controller then performs its own geometric path planning to match the subject’s movement, often anticipating turns and speed changes. This sophisticated interaction between target geometry and drone control system geometry allows for dynamic and smooth tracking without manual input.
Calibration and Distortion Correction
Camera calibration is a crucial geometric process for ensuring the accuracy of visual data. Lenses introduce geometric distortions (e.g., radial distortion, tangential distortion) that must be corrected to produce precise measurements and accurate 3D models. Calibration involves capturing images of known geometric patterns (e.g., checkerboards) and then using geometric algorithms to model and subsequently reverse these distortions. This ensures that the raw image data is geometrically faithful to the real-world scene, which is indispensable for applications like mapping and precise object recognition.
The Future: Pushing Geometric Boundaries
As drone technology continues to evolve, so too will the complexity and sophistication of its geometric underpinnings. The demand for greater autonomy, precision, and collaborative capabilities will only deepen the reliance on advanced geometric theory and application.
Swarm Robotics and Collaborative Geometry
The future of drone operations includes swarm robotics, where multiple drones collaborate to achieve a common goal. This introduces a new layer of geometric complexity: how do multiple drones maintain formation, avoid collisions with each other and external obstacles, and collectively map or survey an area? This requires distributed geometric algorithms that allow each drone to understand its position and movement relative to every other drone in the swarm, as well as the overall mission objective. Concepts like geometric graph theory and decentralized spatial reasoning become paramount.
Real-time Dynamic Environmental Mapping
Future drones will move beyond static 3D mapping to truly dynamic environmental understanding. Imagine drones not only mapping a static building but understanding and predicting the movement of every person, vehicle, and even wind pattern within that environment in real-time. This involves continuous, dynamic geometric modeling of the environment, incorporating temporal dimensions. It pushes the boundaries of point cloud processing, real-time geometric reconstruction, and predictive spatial analytics, opening up unprecedented applications in smart cities, disaster response, and autonomous logistics.
In conclusion, the meaning of geometry in drone tech and innovation is fundamental and pervasive. It is the language that allows these machines to perceive, navigate, understand, and interact with the physical world. From basic positioning to complex AI-driven autonomy, geometric principles are the invisible architects of every advanced feature, ensuring that drones not only fly but also operate intelligently and precisely in three-dimensional space.