In the intricate world of flight technology, particularly concerning Unmanned Aerial Vehicles (UAVs) or drones, understanding the various forces at play is paramount. While “weight” is a universally recognized force, its interaction with propulsive elements dictates a vehicle’s ability to defy gravity. One of the most critical concepts in this interplay is “Static Thrust” – often abbreviated as ST in performance discussions. When we ask “what is ST in weight?”, we are delving into the fundamental relationship between a drone’s inherent mass and its capability to generate the necessary upward force to lift, hover, and maneuver. Static thrust refers to the maximum force a propulsion system (motor and propeller) can generate when the vehicle is stationary, typically measured against a test stand. This force is the bedrock of a UAV’s vertical performance, directly determining its lift capacity, hover efficiency, and overall flight envelope.
The Fundamentals of Static Thrust
Static thrust is a direct measure of the propulsive power available to an aircraft at zero airspeed. For multi-rotor drones, this force is what allows the entire system to overcome gravity.
Defining Static Thrust
Static thrust is the reaction force generated by a propeller pushing air downwards when the drone is not moving horizontally. Unlike dynamic thrust, which is measured when the aircraft is in forward motion, static thrust is critical for vertical take-off, hovering, and landing. It’s produced by the rotation of a propeller, which accelerates a volume of air downwards, creating an equal and opposite upward force (Newton’s third law). The amount of air moved and the speed at which it’s accelerated dictate the magnitude of the thrust. This seemingly simple principle involves complex aerodynamics, where blade shape, pitch, and rotational speed all play a significant role. For a drone to lift off, the sum of the static thrust generated by all its propellers must exceed the drone’s total weight.
Measurement and Units
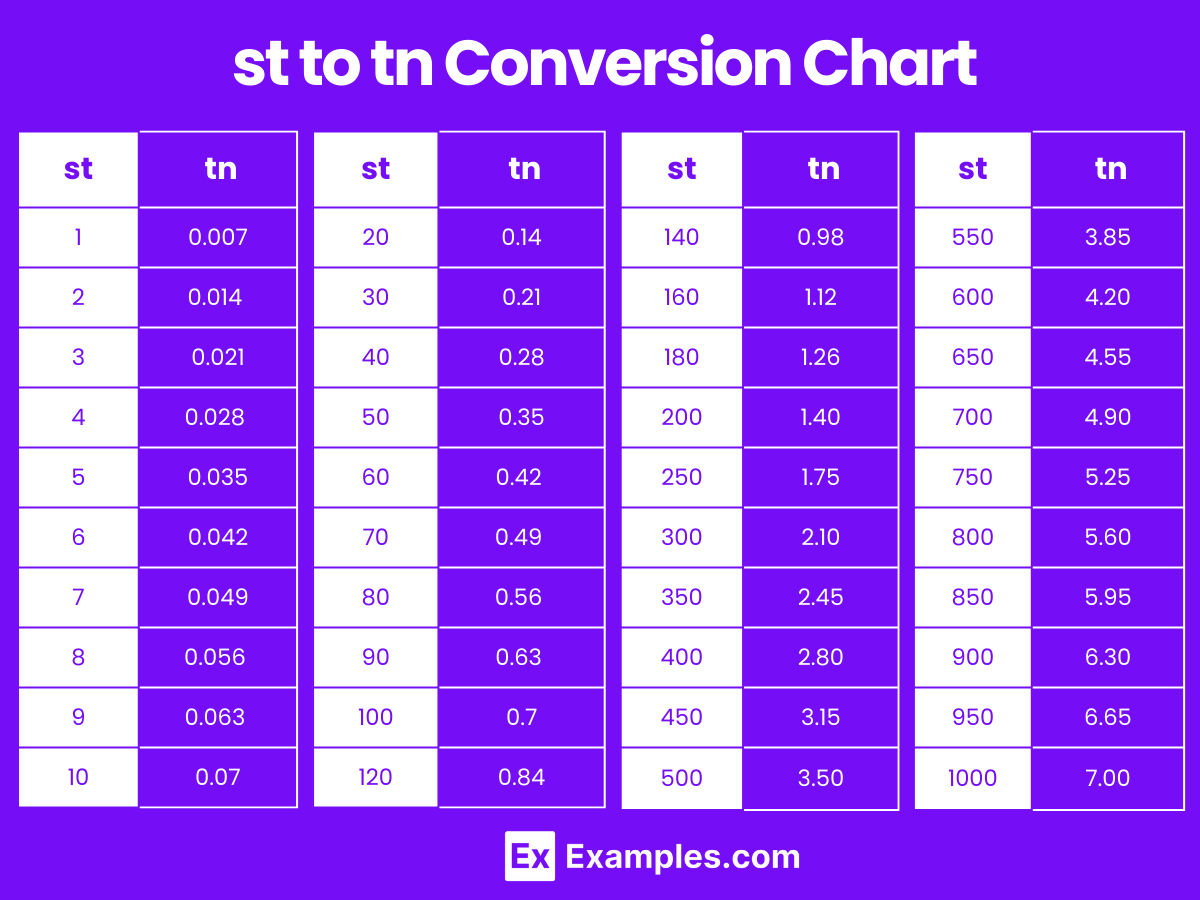
Static thrust is typically measured using a thrust stand, where a motor and propeller combination is mounted and run, and the force generated is recorded. Common units for static thrust include grams-force (gf), ounces-force (ozf), newtons (N), or pounds-force (lbf). For most hobbyist and commercial drones, grams or newtons are the preferred units. For instance, a small drone motor might produce 500 grams of thrust, meaning it can theoretically lift 500 grams of weight in a static condition. Engineers and designers meticulously measure this force to predict a drone’s performance characteristics, ensuring that the chosen motor-propeller combination can adequately lift the intended airframe and payload while providing sufficient margins for maneuverability.
The Critical Relationship Between Static Thrust and UAV Weight
The core question, “what is ST in weight?”, directly addresses how static thrust interacts with a drone’s total mass. This relationship is arguably the single most important factor determining a drone’s practical utility and flight capabilities.
Power-to-Weight Ratio and Lift Capacity
The ratio of total static thrust to the drone’s total weight (often referred to as the thrust-to-weight ratio, TWR) is a crucial metric. A TWR greater than 1:1 is essential for a drone to achieve lift-off. For stable flight and decent maneuverability, a ratio of at least 2:1 is generally recommended, meaning the drone can produce twice its weight in static thrust. For acrobatic FPV racing drones, this ratio can climb to 5:1 or even higher for aggressive maneuvers and rapid acceleration. For heavy-lift industrial drones, the focus shifts to efficiency, often aiming for a lower but still sufficient TWR to maximize payload capacity while maintaining stable flight. This ratio dictates not only what the drone can lift but also how responsive and agile it will be in the air.
Hover Efficiency and Endurance
Maintaining a stable hover is one of the most power-intensive phases of drone flight, as the aircraft is continuously fighting gravity without the aerodynamic benefits of forward motion. The minimum static thrust required to hover is exactly equal to the drone’s total weight. However, propellers are most efficient at a certain operating point. Designers strive to select propulsion systems where the hover thrust requirement falls within the efficient operating range of the motor-propeller combination. An excessively high static thrust capability for a lightweight drone might mean running motors at inefficiently low RPMs for hover, reducing battery endurance. Conversely, insufficient thrust capability will necessitate running motors at maximum throttle just to stay aloft, drastically shortening flight time and reducing stability margins.
Ascent Rate and Maneuverability
A higher thrust-to-weight ratio directly correlates with a drone’s ability to accelerate upwards and change direction quickly. Drones with ample static thrust can achieve rapid vertical ascent rates, useful for quickly gaining altitude or avoiding obstacles. This excess thrust also contributes significantly to a drone’s agility and responsiveness, allowing for precise control and dynamic maneuvers. For applications like aerial surveying or inspections, a stable hover is key, but for search and rescue or cinematic applications where dynamic shots are required, the ability to quickly adjust altitude and position is vital, underscoring the importance of sufficient static thrust margins.
Payload Considerations
One of the primary implications of static thrust in relation to weight is its direct impact on a drone’s payload capacity. A drone’s total weight comprises its frame, motors, batteries, flight controller, and any attached sensors or cameras. The available thrust margin (total static thrust minus the drone’s empty weight) determines how much additional weight, or payload, the drone can carry. For professional applications, such as carrying high-resolution cinema cameras, LiDAR scanners, or delivery packages, calculating the required static thrust to lift both the drone and its maximum intended payload is critical. Overloading a drone beyond its optimal static thrust capability not only risks flight failure but also significantly degrades performance, stability, and flight time.

Engineering for Optimal Thrust-to-Weight Performance
Achieving an optimal thrust-to-weight ratio is a complex engineering challenge, requiring careful consideration of every component within the propulsion system and the airframe itself.
Propeller Design and Aerodynamics
Propellers are the direct generators of thrust. Their design—including diameter, pitch (the theoretical distance the propeller would move forward in one revolution if there were no slip), number of blades, and airfoil shape—profoundly affects static thrust output and efficiency. Larger diameters generally produce more thrust at lower RPMs but require more torque. Higher pitch can generate more thrust but also increases current draw and can lead to stall at lower airspeeds. Materials like carbon fiber offer stiffness and lightness, improving efficiency. The ideal propeller choice is a delicate balance, matching it precisely to the motor’s characteristics and the drone’s mission profile.
Motor Selection and Efficiency
Electric motors convert electrical energy into rotational mechanical energy, driving the propellers. Key motor specifications include Kv rating (RPM per volt), size, weight, and maximum current draw. A motor’s Kv rating is crucial for matching it with a propeller and battery voltage to achieve the desired RPM and, consequently, thrust. Lower Kv motors typically produce more torque and are often paired with larger, slower-spinning propellers for heavy-lift or long-endurance applications, prioritizing efficiency. Higher Kv motors, conversely, are often used with smaller propellers for agility and speed in racing or performance drones. Motor efficiency—how effectively electrical power is converted into mechanical power—is also paramount for maximizing flight time.
Electronic Speed Controllers (ESCs)
ESCs are the brains behind the motors, regulating their speed and power output based on commands from the flight controller. A high-quality ESC ensures smooth motor operation, precise thrust control, and efficient power delivery. ESCs must be appropriately rated for the maximum current drawn by the motors to prevent overheating and failure. Advanced ESC features, such as active braking and various commutation schemes, can further enhance motor responsiveness and efficiency, directly impacting how effectively static thrust is managed during flight.
Structural Weight Optimization
While optimizing propulsion components is crucial, minimizing the drone’s inherent structural weight is equally vital. Every gram saved in the frame, landing gear, or internal wiring translates directly into available payload capacity or increased flight time. Advanced materials like carbon fiber, aerospace-grade aluminum, and sophisticated composite designs are employed to create robust yet incredibly lightweight airframes. The ongoing pursuit of structural weight optimization ensures that a greater proportion of the generated static thrust can be dedicated to useful work, rather than merely lifting the drone itself.
Implications for Flight Technology and Future Innovations
The understanding and application of static thrust are fundamental to a wide range of flight technology advancements and future drone capabilities.
Advanced Stabilization and Control Systems
Precise control over static thrust, achieved through sophisticated flight controllers and ESCs, is the bedrock of modern drone stabilization. Flight controllers continuously adjust the thrust of individual motors to maintain level flight, compensate for wind, and execute precise maneuvers. This granular thrust control is essential for advanced features such as GPS position hold, autonomous flight paths, object tracking (AI follow mode), and smooth cinematic camera movements, all of which rely on the drone’s ability to maintain a desired position and orientation by varying its propulsive forces.
Vertical Take-Off and Landing (VTOL) Aircraft
For VTOL aircraft, including multi-rotor drones and hybrid fixed-wing VTOL designs, static thrust is the defining characteristic of their vertical flight phases. Whether it’s a quadcopter lifting off or a tilt-rotor transitioning from vertical to horizontal flight, the ability to generate sufficient static thrust against gravity is non-negotiable. Future VTOL designs, especially for urban air mobility or package delivery, will continue to push the boundaries of thrust efficiency and density, seeking to lift heavier loads more quietly and efficiently.
Heavy-Lift and Specialized Drones
The demand for drones capable of carrying significant payloads—from industrial inspection equipment and emergency supplies to advanced scientific instruments—is growing. Designing these heavy-lift platforms revolves around maximizing static thrust output and efficiency. This often involves larger motors, specialized high-pitch propellers, and multi-rotor configurations (hexacopters, octocopters) to distribute the load and provide redundancy. The meticulous calculation of static thrust requirements against the projected total weight is the starting point for such specialized drone development.
Emerging Propulsion Technologies
Research into new propulsion technologies continually aims to enhance static thrust characteristics. Ducted fans, for instance, can provide higher thrust density (more thrust per unit area) than open propellers, albeit with different efficiency curves. Coaxial motor setups (two propellers on the same axis, rotating in opposite directions) increase thrust within a smaller footprint. Furthermore, advancements in battery technology, motor materials, and power electronics are constantly improving the power-to-weight ratio of propulsion systems, promising even greater static thrust capabilities and longer endurance for the next generation of UAVs.
In conclusion, when we ask “what is ST in weight?” within the context of flight technology, we are inquiring about the crucial metric of static thrust and its indispensable role in overcoming a drone’s weight. It is the very essence of a UAV’s lift, agility, endurance, and payload capability, driving continuous innovation in every aspect of drone design and application.