In the rapidly evolving world of uncrewed aerial vehicles (UAVs), precision and autonomy are paramount. From intricate aerial surveys to sophisticated package delivery and advanced surveillance, the ability of a drone to accurately position itself and navigate its environment is foundational. At the heart of many advanced flight technology applications lies a seemingly simple yet profoundly impactful geometric concept: the midpoint formula. While often introduced in basic mathematics, its implications for drone navigation, stabilization systems, GPS utilization, and obstacle avoidance are far-reaching, enabling more efficient, reliable, and intelligent flight operations. Understanding how this fundamental formula is leveraged reveals a critical layer of the computational intelligence that powers modern drone technology.
Understanding the Core Concept: Coordinates and Averages
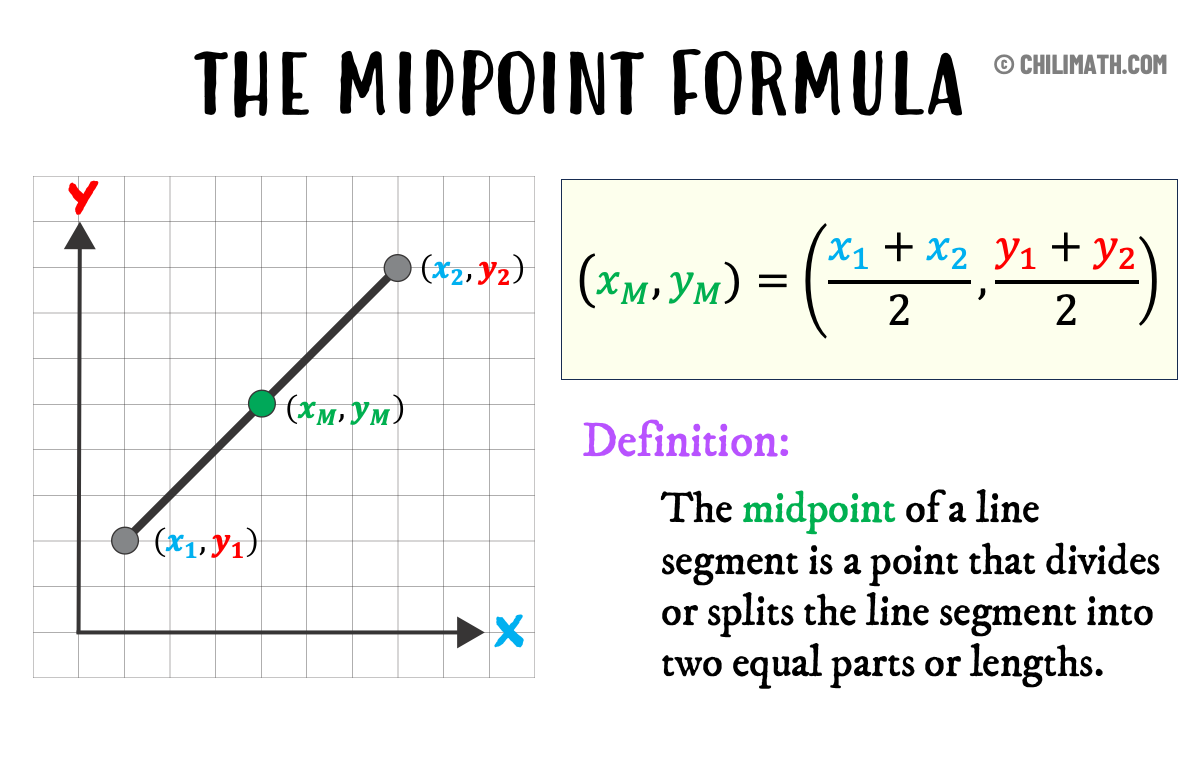
At its essence, the midpoint formula calculates the exact middle point between two given points in a coordinate system. For drone applications, this typically means working in three-dimensional space, where each point is defined by its X, Y, and Z coordinates. In the context of drone flight, these coordinates usually translate to geographical positions—latitude (often Y), longitude (often X), and altitude (Z)—derived primarily from Global Positioning System (GPS) data combined with altimeter readings.
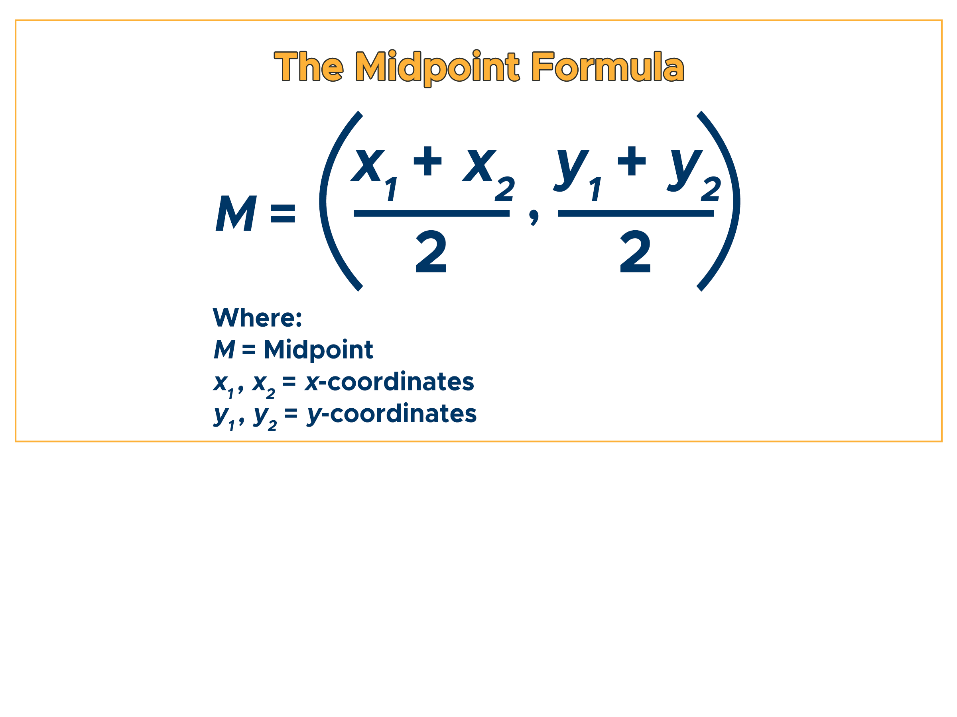
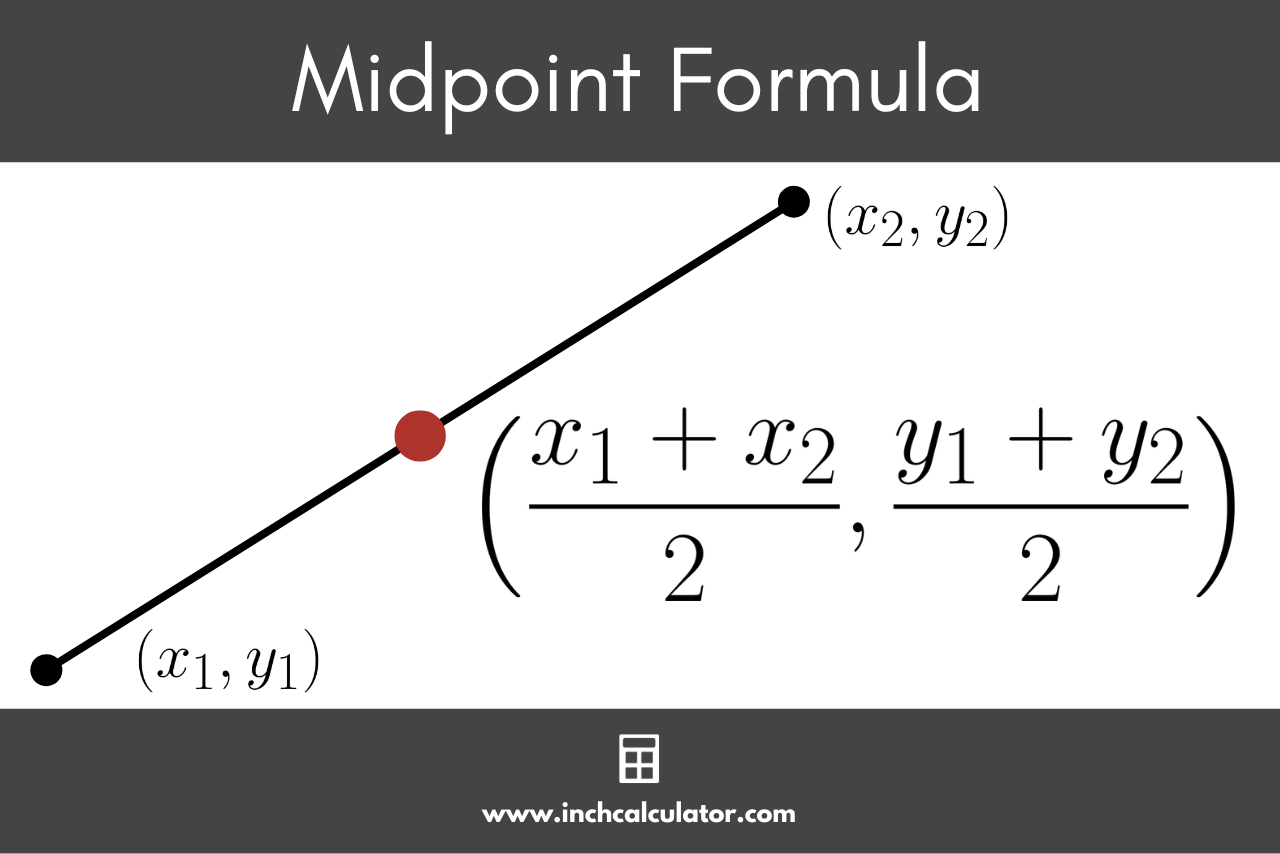
The mathematical representation of the midpoint formula for two points, P1(x1, y1, z1) and P2(x2, y2, z2), is:
Midpoint M = ( (x1 + x2) / 2 , (y1 + y2) / 2 , (z1 + z2) / 2 )
Here, ‘x’ and ‘y’ represent the horizontal plane coordinates (e.g., longitude and latitude, or local Cartesian easting and northing), and ‘z’ represents the vertical coordinate (altitude). The formula essentially computes the average of the respective coordinates of the two end points. This simple averaging mechanism yields a new coordinate pair (or triplet) that is equidistant from both initial points along the direct path connecting them.
For drones, this isn’t just an abstract mathematical exercise; it’s a direct operational utility. A drone’s flight controller, using real-time data from its GPS receiver, inertial measurement unit (IMU), and barometer, constantly processes its own position and potentially the positions of targets or other environmental features. By applying the midpoint formula to known or predicted coordinates, a drone can derive crucial intermediate waypoints, define central observation points, or calculate relative positions for dynamic tasks. This capacity to precisely identify an intermediary location is a building block for many complex flight behaviors and navigational strategies.
Practical Applications in Drone Flight Technology
The integration of the midpoint formula into drone flight technology significantly enhances a UAV’s capabilities across various operational fronts. Its utility extends from fundamental path planning to sophisticated real-time decision-making, bolstering navigation, stabilization, and situational awareness.
Enhanced Waypoint Navigation
Autonomous drone missions frequently rely on pre-programmed flight paths defined by a series of waypoints. The midpoint formula plays a vital role in optimizing and refining these paths. For instance, if a drone needs to travel between two distant waypoints (P1 and P2), inserting a midpoint waypoint can serve several purposes:
- Path Smoothing: By adding an intermediate waypoint, the drone can execute a smoother, less abrupt turn, improving flight efficiency and reducing stress on the airframe. This is particularly useful for cinematic applications where fluid motion is desired.
- Obstacle Avoidance: If a known, static obstacle lies directly on the line segment between two primary waypoints, the midpoint formula can be used to calculate a diversion point. Instead of navigating directly through the obstacle, the system can compute a midpoint, and then calculate two new waypoints offset from this midpoint to safely bypass the obstruction, creating a slight “bulge” in the path.
- Battery Optimization: For longer missions, defining intermediate waypoints based on the midpoint can help break down the journey into manageable segments, potentially allowing for mid-flight battery swaps at easily accessible, centrally located recharging stations.
- Multi-Drone Rendezvous: In coordinated operations involving multiple drones, the midpoint formula can determine an optimal rendezvous point where all units can converge before proceeding to the next phase of a mission. This ensures synchronized actions and efficient task allocation.
Optimized Search and Survey Missions
For missions requiring comprehensive area coverage, such as agricultural surveys, environmental monitoring, or search and rescue operations, the midpoint formula is instrumental in designing efficient flight patterns.
- Defining Search Grids: When defining a search area by its boundary points (e.g., four corners of a rectangular or square zone), the midpoint formula can quickly identify the geographical center of that area. This central point can then serve as the origin for a spiraling search pattern or as a reference for dividing the area into smaller, manageable grid segments for multiple drones.
- Targeting Central Observation Points: In precision agriculture or infrastructure inspection, a central point of interest within a larger field or structure might need to be continuously monitored or photographed. The midpoint formula allows operators to calculate this precise central location from two defining boundary points, ensuring the drone captures the most relevant data.
- Sample Point Generation: For remote sensing applications where data needs to be collected at regular intervals or specific points, the midpoint formula can be used iteratively to generate evenly distributed sample points across a defined transect or area, ensuring thorough and unbiased data acquisition.
Advanced Stabilization and Relative Positioning
Beyond static path planning, the midpoint formula contributes significantly to a drone’s dynamic operational capabilities, especially in scenarios involving movement or interaction with other entities.
- Dynamic Target Tracking: In “follow-me” modes or for tracking moving objects, predicting a target’s future position is crucial. While more complex algorithms are involved, the midpoint concept can be used in simpler scenarios to estimate an optimal drone position. For example, if a drone needs to maintain a position equidistant between itself and a moving subject, it can continually calculate the midpoint between its current position and the target’s estimated next position, adjusting its trajectory accordingly.
- Multi-Drone Formation Flying: For swarm robotics or drones flying in formation, maintaining precise relative distances is critical. The midpoint formula can help drones position themselves relative to their neighbors. For instance, a drone in the middle of a formation might continually calculate the midpoint between two adjacent drones to ensure it stays perfectly centered and maintains the formation’s integrity.
- Obstacle Avoidance in Dynamic Environments: When a drone detects two potential obstacles in its immediate flight path, the midpoint formula can help identify the safest point between them to navigate through. This requires real-time processing of sensor data (e.g., from LiDAR or stereo cameras) to map the environment and calculate evasive trajectories that utilize these calculated midpoints.
- Sensor Fusion for Enhanced Accuracy: In some advanced systems, data from multiple sensors observing the same phenomenon from different points might be combined. While complex filtering algorithms are common, a basic form of sensor fusion might involve averaging or finding a “midpoint” of conflicting readings to derive a more robust or plausible estimate of a particular environmental parameter at a specific location.
Mathematical Foundations and Implementation in Drone Systems
The mathematical simplicity of the midpoint formula belies its powerful role when implemented within a drone’s flight control system. The computational efficiency of this formula—involving only additions and divisions—makes it ideal for real-time processing on onboard microcontrollers and processors that have limited resources compared to ground-based systems.
Drone flight controllers continuously receive and process data streams from various sensors:
- GPS Receivers: Provide global latitude, longitude, and altitude data (often in WGS84 coordinate system).
- Inertial Measurement Units (IMUs): Comprising accelerometers and gyroscopes, these sensors provide data on the drone’s orientation, velocity, and relative position changes.
- Barometers: Offer precise altitude measurements relative to sea level.
- Vision-based Systems (e.g., Optical Flow, LiDAR, Stereo Cameras): Provide local positioning and environmental mapping data.
The flight controller’s software takes these raw sensor inputs, filters them, and converts them into usable coordinate data. When performing a task that requires a midpoint calculation, the system extracts the relevant X, Y, and Z coordinates (often after converting them into a local Cartesian system for easier calculation) and applies the formula. The resulting midpoint coordinates are then translated back into flight commands—such as thrust adjustments, pitch, roll, and yaw angles—to guide the drone to the desired location.
Careful consideration is given to the accuracy of the input coordinates. GPS data, while highly useful, can have inherent inaccuracies (e.g., due to atmospheric conditions, satellite availability, or multi-pathing). When calculating midpoints, these errors can propagate. Therefore, sophisticated drone systems often incorporate Kalman filters or other estimation algorithms to fuse data from multiple sensors, thereby reducing positional uncertainty before midpoint calculations are performed, leading to more precise and reliable navigation.
Future Implications for Autonomous Drone Systems
As drones become increasingly autonomous and capable of complex tasks, the role of fundamental mathematical tools like the midpoint formula will only expand. It underpins more advanced algorithms and contributes directly to the realization of truly intelligent UAV operations.
In the realm of predictive path planning, the midpoint formula can be integrated into algorithms that dynamically re-route drones in response to unforeseen events or changing mission parameters. For instance, if an unexpected weather front emerges, a drone could calculate safe detour waypoints based on the midpoints between clear zones, maintaining optimal flight efficiency while ensuring safety.
For advanced swarm intelligence, where multiple drones operate cohesively to achieve a common goal, the midpoint formula is invaluable. Drones in a swarm might need to maintain relative positions, collectively transport an object by converging at its center of gravity, or distribute sensing tasks evenly across a target area. All these require continuous, real-time calculation of midpoints (or centroids for more than two points) to ensure coordinated and effective behaviors without collisions.
Furthermore, as drone technology advances toward more precise inspection, delivery, and mapping tasks, the ability to define and navigate to exact spatial points becomes paramount. The midpoint formula, by providing a robust and computationally light method for identifying equidistant locations, will remain a critical building block in the software architecture of future autonomous drone systems, enabling greater precision, reliability, and ultimately, a wider array of applications for UAVs. It is a testament to how foundational mathematical concepts, when applied ingeniously, can unlock revolutionary technological capabilities.