The Mathematical Foundation of Flight Orientation
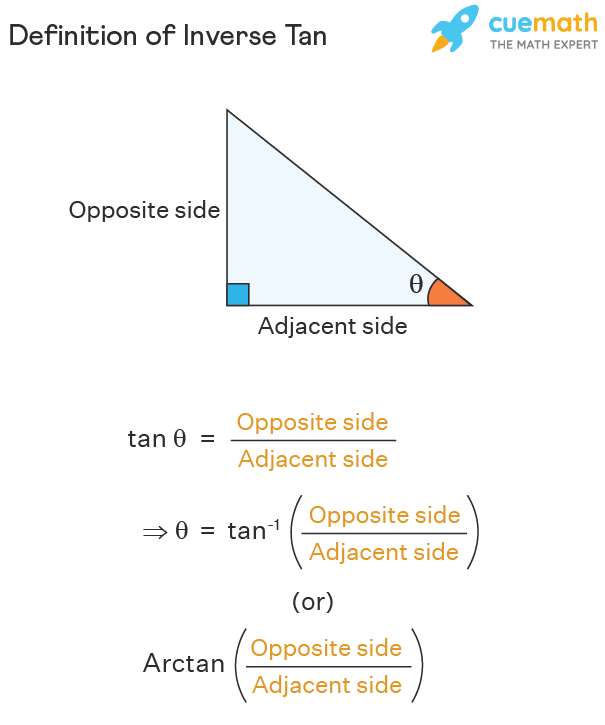
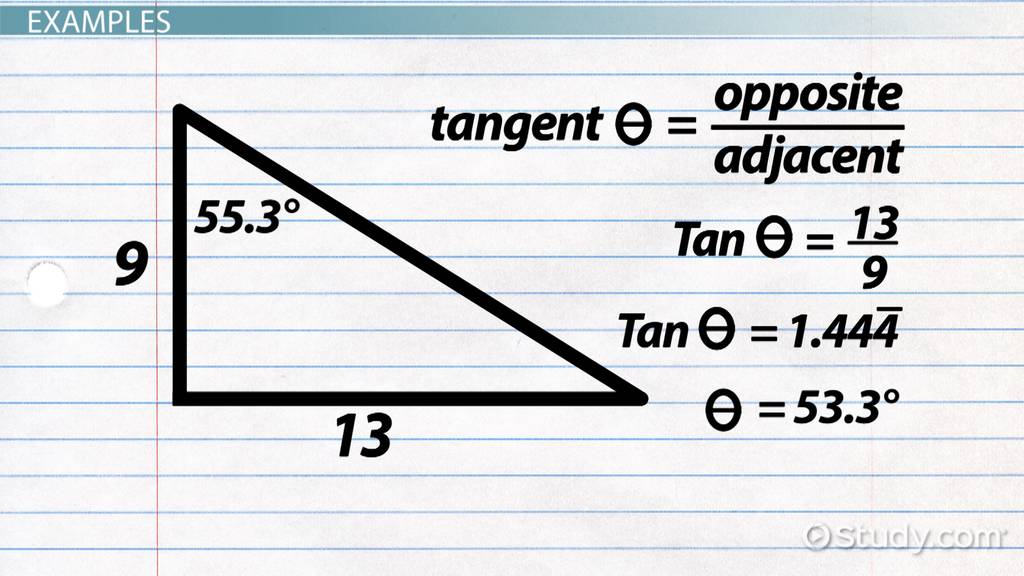
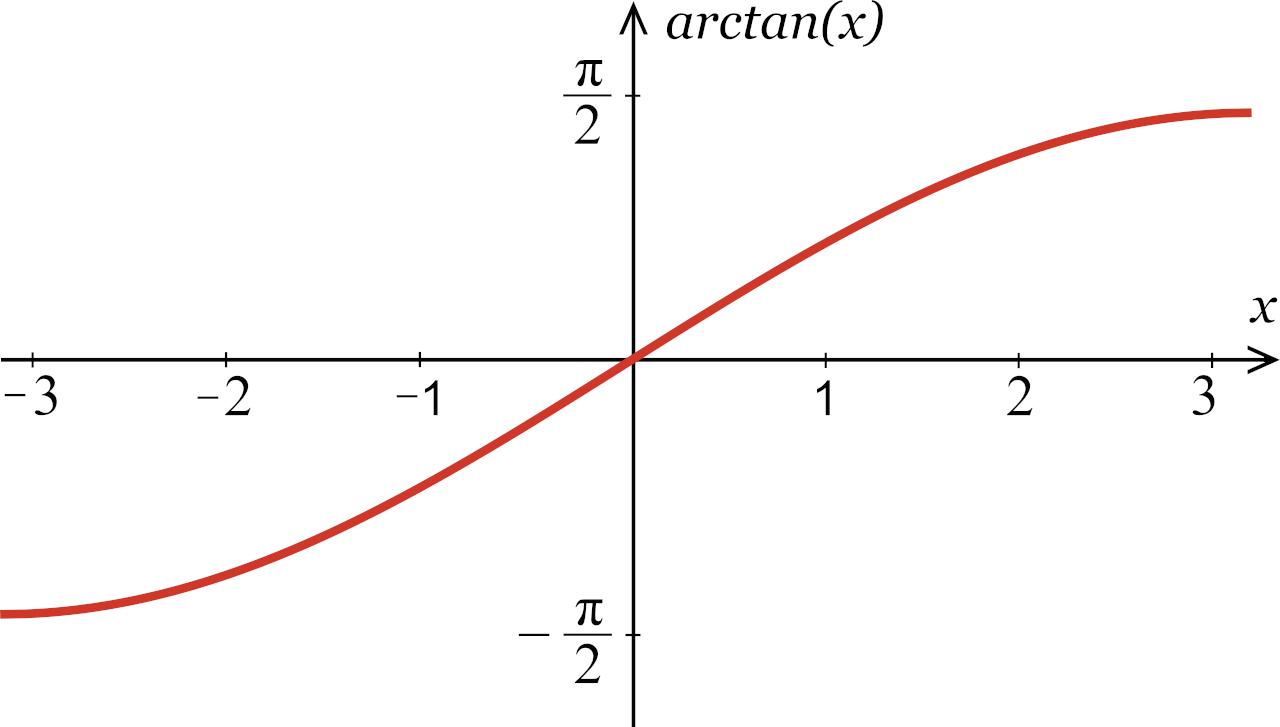
In the sophisticated world of flight technology, precision in understanding and controlling orientation is paramount. Every maneuver, every stable hover, and every successful navigation relies on accurate knowledge of a drone’s position and attitude in three-dimensional space. At the heart of many of these calculations lies trigonometry, and specifically, the inverse tangent function. Mathematically, the tangent of an angle in a right-angled triangle is the ratio of the length of the opposite side to the length of the adjacent side. The inverse tangent, denoted as arctan or tan⁻¹, is the function that reverses this process: given the ratio of the sides, it returns the corresponding angle. While this might sound like abstract mathematics, its application in flight technology is profoundly practical, translating raw sensor data into actionable insights for navigation and stabilization systems.
Understanding Angles in 3D Space
For a drone, understanding its orientation involves knowing its pitch, roll, and yaw angles. Pitch describes the nose-up or nose-down tilt, roll describes the wing-left or wing-right tilt, and yaw describes the left or right rotation around its vertical axis. These three angles define the drone’s attitude relative to the ground or a chosen reference frame. Inertial Measurement Units (IMUs), which typically include accelerometers, gyroscopes, and magnetometers, are the primary sensors for gathering the data needed to compute these angles. Accelerometers measure linear acceleration along three axes (X, Y, Z), gyroscopes measure angular velocity (rate of rotation), and magnetometers measure the Earth’s magnetic field for heading information. The challenge lies in converting these raw measurements into stable, reliable pitch, roll, and yaw angles, a process where the inverse tangent plays a critical role, especially when dealing with static acceleration components like gravity.
From Accelerometers to Attitude
Accelerometers are particularly useful for determining pitch and roll in static or quasi-static conditions because they can detect the direction of gravity. When a drone is level, its Z-axis accelerometer will primarily register the force of gravity (1g downwards), while X and Y accelerometers will read close to zero. If the drone pitches forward, the X-axis accelerometer will start to register a component of gravity, and the Z-axis reading will decrease. Similarly, for roll, the Y-axis accelerometer will be affected. The beauty of the inverse tangent function, specifically the atan2 variant (which takes two arguments, typically y and x, and correctly determines the quadrant of the angle), is its ability to convert these orthogonal acceleration components into an angle. For instance, the pitch angle can be derived from the ratio of the X-axis acceleration to the Z-axis acceleration, and the roll angle from the ratio of the Y-axis acceleration to the Z-axis acceleration, using atan2 to handle all possible orientations robustly. This mathematical step is fundamental to almost every drone’s ability to maintain a stable flight path.
Inverse Tangent in Drone Stabilization Systems
The core functionality of any drone relies heavily on its stabilization system, which acts as the brain for maintaining equilibrium and responding to pilot commands or autonomous flight instructions. Without accurate attitude estimation, a drone would quickly become uncontrollable, drifting or flipping in the air. The inverse tangent is a key component in this estimation, transforming raw sensor input into the precise angular data required by the flight controller.
Pitch and Roll Calculation
For dynamic flight, simply using raw accelerometer data for pitch and roll can be problematic because accelerometers also measure linear acceleration due to movement, not just gravity. This is where sensor fusion algorithms, such as Kalman filters or complementary filters, come into play. These algorithms combine the stable but noisy long-term gravity reference from accelerometers with the precise but drifting short-term angular velocity data from gyroscopes.
However, even within these advanced filters, the inverse tangent provides the initial, foundational angle estimation from the accelerometer data. For example, in a simplified complementary filter, the accelerometer’s derived angle (calculated using atan2(Ax, Az) for pitch or atan2(Ay, Az) for roll, where Ax, Ay, Az are accelerometer readings along X, Y, Z axes) is blended with the gyroscope’s integrated angular velocity. The accelerometer provides the gravity vector, and the inverse tangent translates this vector into a direct representation of the tilt angle. This angle is then integrated with the high-frequency angular rate data from the gyroscope to provide a robust, low-latency, and drift-free estimation of the drone’s actual pitch and roll. This continuous, real-time calculation, powered by inverse tangent, is what allows a drone to hold a level hover, fly forward steadily, or perform controlled maneuvers without wobbling.
Yaw Control and Magnetometers
While accelerometers are excellent for pitch and roll relative to gravity, they don’t provide heading (yaw) information. For this, magnetometers are crucial. Magnetometers measure the strength and direction of the Earth’s magnetic field, acting like a digital compass. By comparing the drone’s orientation relative to the Earth’s magnetic north, the flight controller can determine its yaw angle.
Similar to pitch and roll, the inverse tangent is used to derive the yaw angle from magnetometer readings. A 2D vector, composed of the magnetic field components along the drone’s X and Y axes (after compensation for pitch and roll), can be used with atan2 to calculate the heading angle relative to magnetic north. For instance, yaw = atan2(My, Mx), where My and Mx are the magnetic field components. This provides the drone with its directional awareness, allowing it to maintain a desired heading, follow a specific bearing, or orient itself for specific tasks like mapping or photography. In conjunction with gyroscopes, which provide short-term yaw rate data, and often GPS for absolute heading correction, the magnetometer-derived yaw, enabled by the inverse tangent, is vital for stable and directed flight.
Enhancing Navigation and Autonomous Flight
Beyond core stabilization, the inverse tangent is indispensable for advanced flight technology features like navigation and autonomous operations. These applications often require a drone to understand its position relative to waypoints, targets, or obstacles, and to calculate the necessary angles to achieve a desired path or avoid collisions.
Bearing and Directional Awareness
In drone navigation, determining the bearing from the drone’s current position to a target waypoint is a common task. While GPS provides absolute latitude and longitude coordinates, the drone needs to know which direction to fly. This is where the inverse tangent re-enters the picture. Given the (delta_latitude, delta_longitude) between the drone’s current position and the target waypoint, the bearing angle can be calculated using atan2(delta_longitude, delta_latitude). This calculation provides the precise angle (relative to true north) that the drone needs to orient itself towards to reach the destination. Autonomous flight modes, such as “Go Home” or “Waypoint Navigation,” rely heavily on these continuous bearing calculations. The drone’s flight controller constantly re-evaluates its bearing to the next waypoint, adjusts its yaw, and commands the appropriate thrust vectors to follow the calculated path, ensuring efficient and accurate navigation.
Obstacle Avoidance and Relative Positioning
Advanced flight technology incorporates obstacle avoidance systems, often utilizing sensors like LiDAR, ultrasonic, or stereo vision cameras. These sensors provide range data to objects in the drone’s vicinity. To effectively avoid a collision, the drone not only needs to know how far an obstacle is but also where it is relative to its current path—specifically, its angular position.
For example, if a stereo vision system identifies an obstacle, it can determine its X and Y coordinates in the drone’s forward-looking frame. The inverse tangent, atan2(Y_obstacle, X_obstacle), can then be used to calculate the angle of the obstacle relative to the drone’s current heading. This angular information is critical for the flight controller to make intelligent decisions: should it turn left, right, climb, or descend? By continuously calculating the angular position of detected obstacles, the inverse tangent enables the drone to execute precise evasive maneuvers, ensuring safe operation in complex environments. This capability is fundamental for future autonomous drone delivery systems, inspection drones operating in confined spaces, and search-and-rescue operations where environmental awareness is critical.
Practical Implications for Drone Performance
The ubiquitous presence and precise application of the inverse tangent in flight technology directly translate into significant performance benefits for modern drones. Its foundational role underpins the reliability, responsiveness, and versatility that users have come to expect from these aerial vehicles.
Precision and Responsiveness
The real-time and accurate attitude estimation made possible by inverse tangent calculations is directly linked to a drone’s precision and responsiveness. A drone capable of precisely determining its pitch, roll, and yaw angles can react instantaneously and accurately to control inputs from a pilot or autonomous flight algorithms. Whether it’s maintaining a rock-steady hover for aerial photography, executing a complex racing maneuver, or accurately tracking a target in follow mode, the underlying trigonometric computations ensure that the drone’s physical movements align perfectly with the desired angles. This level of precision minimizes drift, reduces oscillation, and provides a smooth, predictable flight experience, which is crucial for both professional applications and recreational flying. The rapid and reliable conversion of sensor data into meaningful angles allows the flight controller to apply corrective thrust vectors with minimal latency, resulting in a highly responsive and stable platform.
Robustness in Diverse Environments
Drones often operate in diverse and challenging environments, from gusty winds to varying magnetic fields and complex terrains. The robust nature of calculations involving the inverse tangent, particularly the atan2 function which correctly handles angles across all quadrants, contributes significantly to the drone’s ability to maintain stability and navigate reliably under such conditions. By providing accurate angular representations despite potential noise or interference in sensor readings, the inverse tangent facilitates the resilience of the flight control system. For instance, in an environment with magnetic interference, robust yaw estimation combining magnetometer data (derived using inverse tangent) with gyroscope readings and GPS heading helps mitigate errors. Similarly, during sudden movements or turbulence, the blend of accelerometer and gyroscope data, with the inverse tangent providing the gravitational reference, ensures that pitch and roll estimates remain stable, preventing loss of control. This foundational mathematical tool, therefore, empowers drones to perform consistently and safely, adapting to the dynamic challenges of aerial operation.