In the rapidly evolving landscape of drone technology and innovation, understanding the underlying probabilities of various events is paramount for designing robust systems, optimizing performance, and ensuring mission success. From the reliability of autonomous flight algorithms to the accuracy of AI-powered object recognition, developers and engineers constantly grapple with outcomes that can often be categorized into two distinct states: success or failure. This binary nature makes the binomial probability distribution an indispensable statistical tool for analyzing and predicting the likelihood of a specific number of successes in a fixed series of independent trials.
The binomial distribution provides a foundational framework for quantifying uncertainty in numerous drone-related applications, allowing for informed decision-making in system development, testing, and deployment. By understanding this distribution, innovators can better anticipate outcomes, mitigate risks, and push the boundaries of what unmanned aerial vehicles (UAVs) can achieve.
Understanding the Fundamentals of Binomial Probability
At its core, the binomial probability distribution helps us answer questions about the probability of observing a certain number of “successful” outcomes when an experiment is repeated multiple times. Before delving into its applications within drone technology, it’s crucial to grasp the fundamental concepts that define this powerful statistical model.
The Core Concept: Bernoulli Trials and Success/Failure Outcomes
The genesis of the binomial distribution lies in what is known as a Bernoulli trial. A Bernoulli trial is a single experiment that has precisely two possible outcomes: “success” or “failure.” For instance, an autonomous drone attempting a precision landing either succeeds or fails. A sensor detecting a specific environmental anomaly either succeeds or fails. An AI vision system correctly identifying a target in a frame either succeeds or fails. The probability of success, denoted as ( p ), remains constant for each trial, and consequently, the probability of failure is ( q = 1 – p ). The simplicity of this binary outcome makes it incredibly versatile for modeling a wide array of events in complex technological systems.
Key Characteristics of a Binomial Experiment
For a series of trials to be classified as a binomial experiment, several critical conditions must be met:
- Fixed Number of Trials (( n )): The experiment must consist of a predetermined number of identical trials. For example, a drone performing 10 consecutive autonomous obstacle avoidance maneuvers, or a communication link attempting to transmit 50 data packets.
- Each Trial is Independent: The outcome of one trial must not influence the outcome of any other trial. If an autonomous landing attempt fails due to a random gust of wind, it doesn’t necessarily mean the next landing attempt will be affected by the same gust in the same way, assuming environmental conditions are not systematically changing.
- Only Two Outcomes (Success/Failure): As discussed with Bernoulli trials, each individual trial must result in one of two mutually exclusive outcomes.
- Probability of Success (( p )) is Constant: The probability of success must remain the same for every trial in the experiment. This is a crucial assumption; if the probability of a sensor correctly identifying an object changes due to varying light conditions over a series of trials, a simple binomial model might not be appropriate without adjustments.
The Binomial Probability Formula
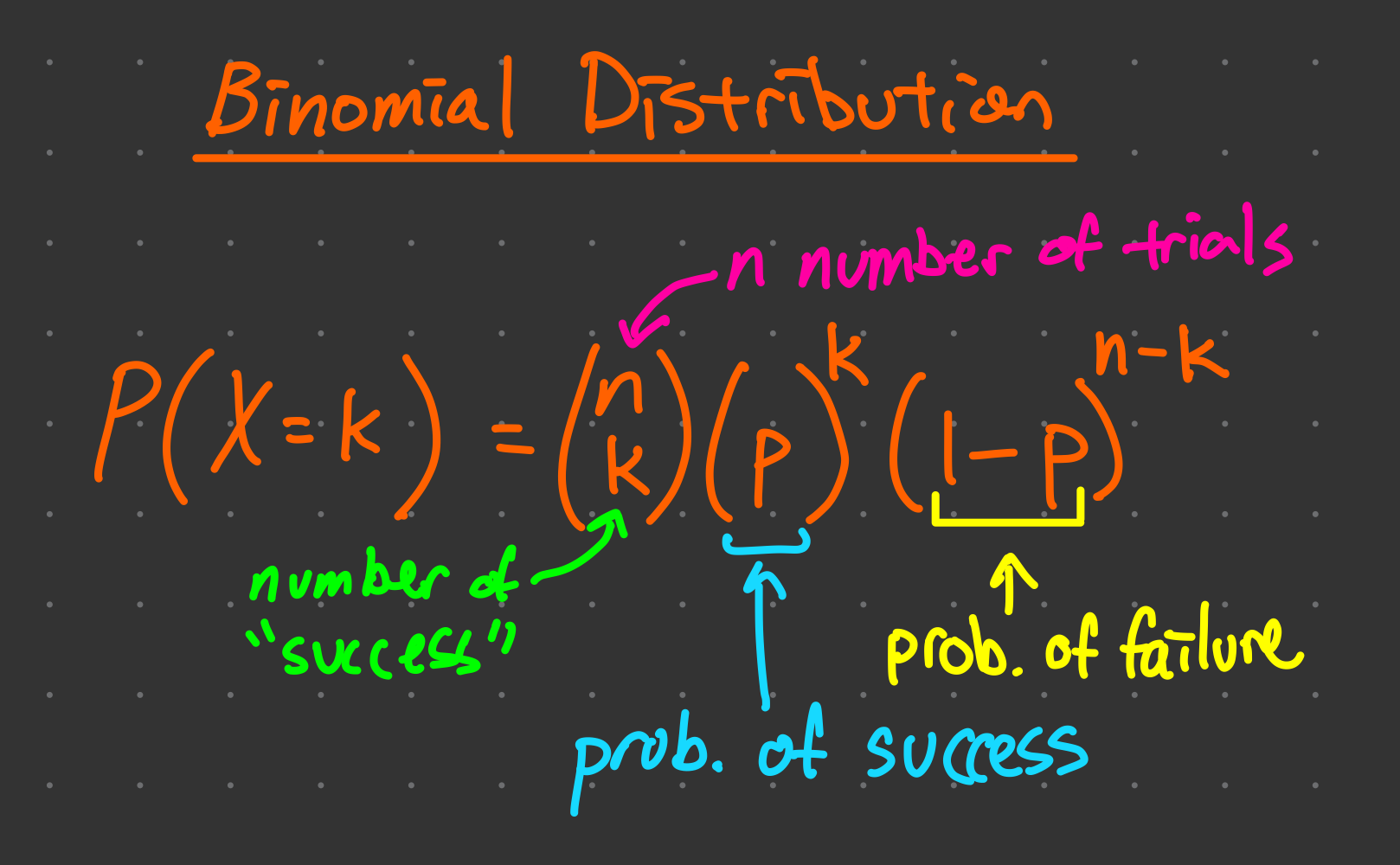
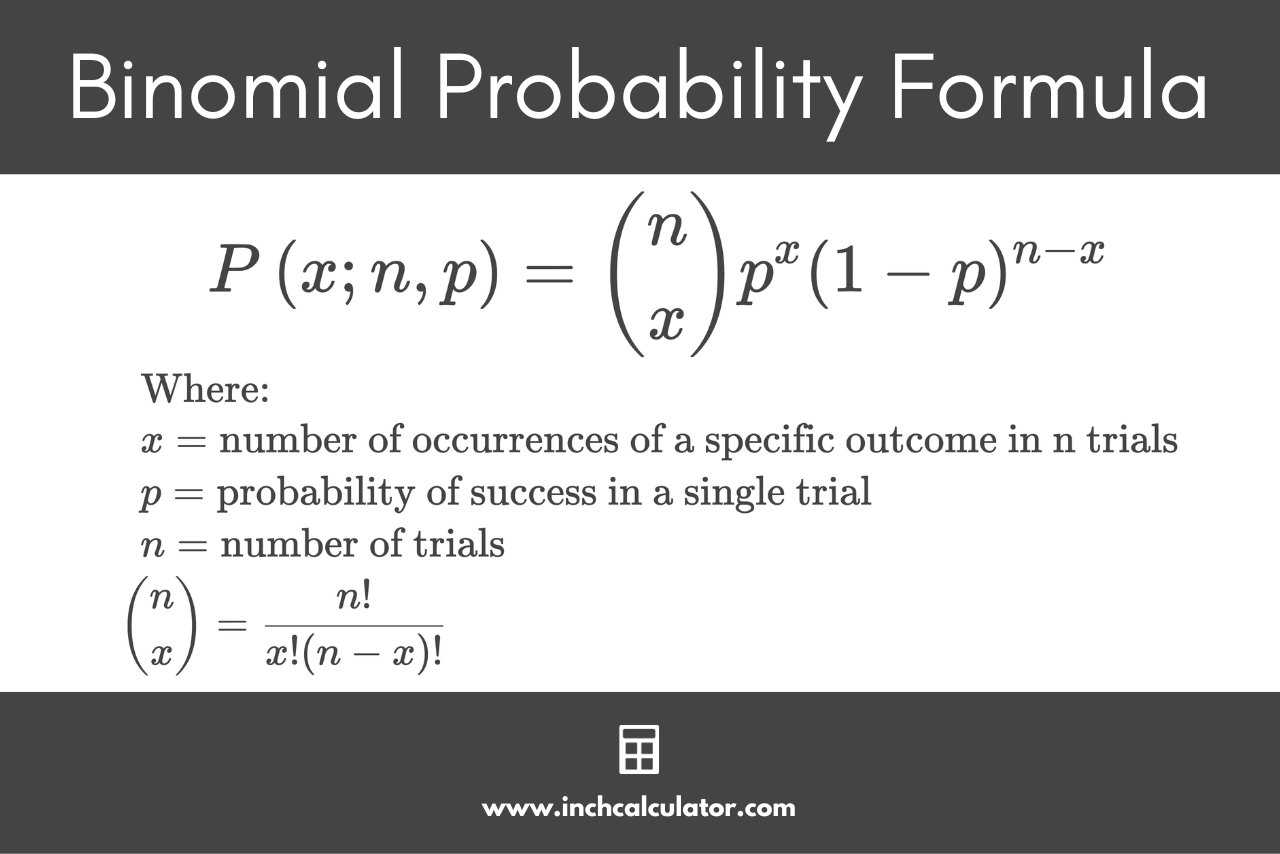
When these conditions are met, the probability of obtaining exactly ( x ) successes in ( n ) trials can be calculated using the binomial probability formula:
[ P(X=x) = binom{n}{x} * p^x * (1-p)^{n-x} ]Where:
- ( P(X=x) ) is the probability of exactly ( x ) successes.
- ( binom{n}{x} ) (read as “n choose x”) represents the number of distinct combinations of choosing ( x ) successes from ( n ) trials. It is calculated as ( frac{n!}{x!(n-x)!} ).
- ( n ) is the total number of trials.
- ( x ) is the number of desired successes.
- ( p ) is the probability of success on a single trial.
- ( (1-p) ) is the probability of failure on a single trial (often denoted as ( q )).
This formula allows engineers to quantify the likelihood of various outcomes, providing a powerful predictive capability essential for advanced tech and innovation in the drone sector.
Applying Binomial Distribution in Drone Tech & Innovation
The practical applications of binomial probability distribution within drone technology are diverse, ranging from validating system reliability to optimizing AI performance. Its ability to model scenarios with clear success/failure criteria makes it a cornerstone for data-driven decision-making.
Autonomous Flight Systems and Reliability Analysis
Consider an autonomous drone designed for package delivery or search and rescue. The reliability of its automated systems, such as takeoff, navigation, and landing, is paramount. Each time the drone attempts an autonomous landing, it’s a trial with two outcomes: success or failure.
Example: A drone manufacturer is testing a new autonomous landing system. They conduct 20 test landings (( n=20 )). From extensive prior testing, the probability of a successful landing (( p )) is known to be 0.95. Using the binomial distribution, engineers can calculate:
- The probability of exactly 19 successful landings out of 20.
- The probability of at least 18 successful landings.
- The probability of fewer than 15 successful landings, which might trigger a redesign or software update.
This analysis helps in setting operational standards, understanding failure rates, and informing safety protocols, directly contributing to the trustworthiness and deployment readiness of autonomous drone fleets.
AI-Powered Object Detection and Tracking
Artificial intelligence is central to many modern drone applications, including surveillance, precision agriculture, and infrastructure inspection. An AI model trained to detect specific objects (e.g., damaged power lines, specific crop diseases, missing persons) performs a binary classification for each detection attempt within its field of view.
Example: An agricultural drone equipped with an AI vision system scans a field for signs of a specific crop disease. Over a series of 100 observations (or image segments) (( n=100 )), the AI’s probability of correctly identifying the disease (( p )) is 0.92.
- What is the probability that the AI correctly identifies the disease in exactly 90 out of 100 observations?
- What is the probability that it misses more than 10 instances (i.e., less than 90 successes)?
Such calculations are vital for evaluating the performance of AI algorithms, fine-tuning their parameters, and understanding their practical accuracy under operational conditions, thereby enhancing the utility of AI in drone innovation.
Remote Sensing and Data Collection Efficacy
Drones are increasingly used for remote sensing, collecting vast amounts of data from various sensors (e.g., multispectral, LiDAR, thermal). The success of data transmission, sensor readings, or the accurate capture of specific environmental parameters can often be modeled binomially.
Example: A drone conducting an environmental survey attempts to transmit 25 critical data packets to a ground station (( n=25 )). Due to potential interference, the probability of a single packet being successfully transmitted (( p )) is 0.88.
- Engineers can determine the probability of all 25 packets being transmitted successfully.
- They can also calculate the probability of losing more than 3 packets (i.e., fewer than 22 successes), which might necessitate retransmission protocols or different communication hardware.
This analysis helps in designing robust communication links, optimizing data management strategies, and ensuring the integrity of remote sensing data critical for mapping, surveying, and environmental monitoring.
Interpreting Binomial Outcomes for Strategic Development
Beyond calculating probabilities, the binomial distribution also offers critical metrics that provide deeper insights into the expected behavior and variability of drone systems, guiding strategic development and optimization efforts.
Expected Value, Variance, and Standard Deviation
For a binomial distribution, we can readily determine the expected number of successes, the variability of outcomes, and the typical spread around the mean:
- Expected Value (Mean, ( E(X) )): The average number of successes expected over many repetitions of the experiment. For a binomial distribution, ( E(X) = n * p ). In our autonomous landing example, with ( n=20 ) and ( p=0.95 ), the expected number of successful landings is ( 20 * 0.95 = 19 ).
- Variance (( Var(X) )): A measure of how spread out the distribution is. For a binomial distribution, ( Var(X) = n * p * (1-p) ). For the landing example, ( 20 * 0.95 * 0.05 = 0.95 ). A lower variance suggests more consistent outcomes.
- Standard Deviation (( SD(X) )): The square root of the variance, providing a more intuitive measure of the average deviation from the mean, in the same units as the number of successes. ( SD(X) = sqrt{n * p * (1-p)} ). For the landing example, ( sqrt{0.95} approx 0.975 ).
These metrics are invaluable. The expected value gives a baseline performance target. The variance and standard deviation quantify the inherent variability and risk associated with the process, enabling engineers to understand the range of outcomes they might reasonably expect.
Real-world Implications for Drone System Optimization
The insights derived from binomial analysis have direct implications for the optimization and strategic development of drone technology:
- Component Reliability: By modeling the success/failure rates of critical components (e.g., motor starts, battery cell performance, sensor activations), manufacturers can estimate system-level reliability and predict maintenance schedules or potential points of failure. This informs design choices for redundancy and robust hardware.
- Mission Planning: Understanding the probability of success for specific mission segments (e.g., reaching a distant waypoint, executing a complex maneuver) allows flight planners to assess mission feasibility, calculate necessary fuel reserves, or determine optimal flight paths that minimize risk.
- Algorithm Validation: For AI and control systems, binomial probability provides a quantitative measure for algorithm validation. If an autonomous system consistently falls below a statistically expected success rate, it signals a need for further development or calibration. This supports the continuous iteration and improvement cycles in software development.
- Quality Control: In drone manufacturing, quality control processes often involve testing components for defects. Binomial distribution can be used to monitor the proportion of defective units in a batch, ensuring products meet stringent quality standards before deployment.
Advanced Considerations and Limitations
While the binomial distribution is a powerful tool, its effective application requires an understanding of its assumptions and potential limitations, especially when integrating it into complex drone technology projects.
When to Use and When Not to Use Binomial Models
The binomial distribution is ideal when events truly exhibit the four core characteristics: a fixed number of independent trials, each with only two outcomes, and a constant probability of success. It is particularly useful for assessing discrete events where counting successes is the primary objective.
However, its utility diminishes when these assumptions are violated. If the probability of success changes significantly over time or with each trial (e.g., battery depletion affecting motor performance over a long flight), or if trials are not independent (e.g., a software bug causing successive failures), a simple binomial model might misrepresent the true probabilities. In such cases, more complex probabilistic models, such as Poisson (for events over a continuous interval), geometric (for number of trials until the first success), or even custom simulation models, might be more appropriate.
Integrating with Other Probabilistic Models for Comprehensive Analysis
In reality, drone systems are rarely governed by a single, isolated binomial process. Instead, multiple probabilistic events interact. For instance, the success of an autonomous mission might depend on the binomial success of individual navigation waypoints, coupled with the reliability of communication links (which might be Poisson distributed for error rates) and the lifespan of components (which might follow an exponential distribution).
Therefore, innovators often integrate binomial analysis with other statistical methods to create comprehensive risk assessment models. This holistic approach allows for a more nuanced understanding of system behavior, enabling engineers to build more resilient, intelligent, and reliable drone technologies capable of tackling increasingly complex challenges in the skies of tomorrow.