In the burgeoning landscape of drone technology, where autonomous capabilities, advanced mapping, and intelligent remote sensing are rapidly evolving, the efficiency of underlying computational processes is paramount. Hidden beneath the algorithms that power these innovations lies a fundamental concept from linear algebra and computer science: the sparse matrix. Far from an abstract mathematical curiosity, sparse matrices are a cornerstone for optimizing the performance, memory footprint, and speed of complex drone operations, making them indispensable for next-generation aerial systems.
What Defines a Sparse Matrix? The Foundation of Efficiency
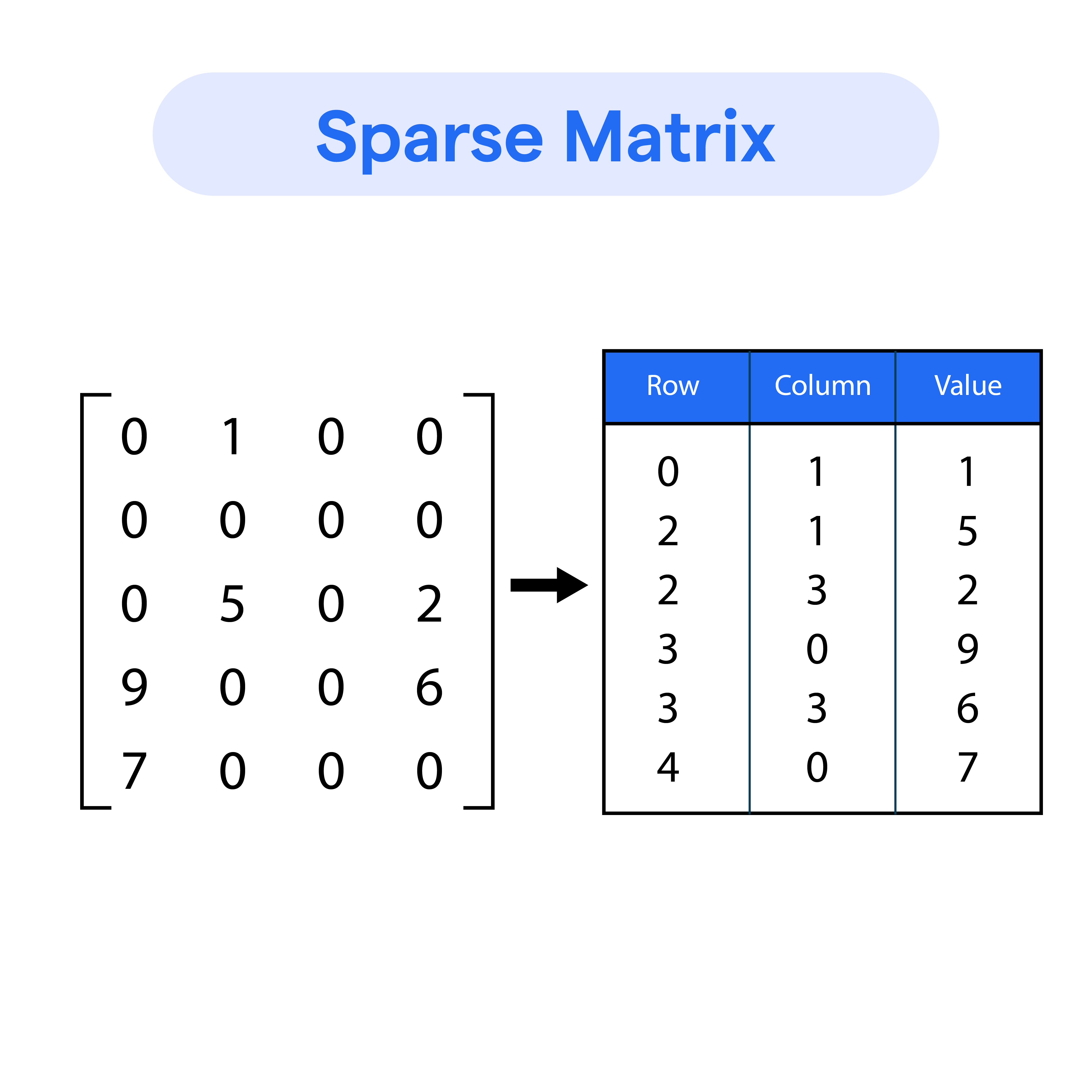
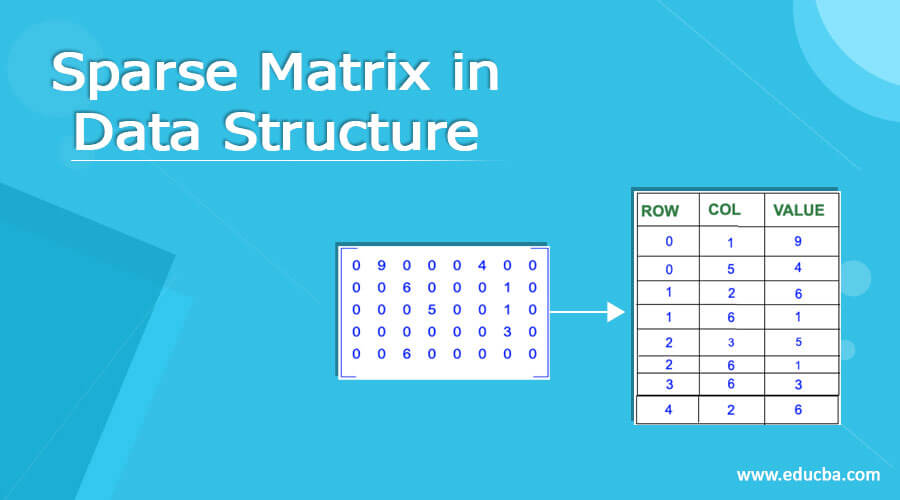
At its core, a matrix is a rectangular array of numbers, symbols, or expressions arranged in rows and columns. In computational terms, matrices are used to represent data, transformations, and relationships. A “dense” matrix stores every single element, regardless of its value. However, many real-world datasets and computational problems involve matrices where a vast majority of the elements are zero. This is precisely what a “sparse” matrix is: a matrix in which the number of zero-valued elements significantly outweighs the number of non-zero elements. While there isn’t a universally agreed-upon threshold for “sparse” (e.g., 90% zeros or more), the defining characteristic is that exploiting this prevalence of zeros can lead to substantial computational and memory advantages.
Consider a simple analogy: imagine a vast spreadsheet representing a city map. If you were only interested in the locations of specific buildings and roads, and the rest of the map was empty fields or uninteresting areas, a dense representation would fill every single cell, mostly with “empty” markers. A sparse representation, however, would only store the coordinates and details of the buildings and roads, along with a clever way to infer that everything else is empty.
The primary motivations for using sparse matrices are:
- Reduced Storage: Storing only the non-zero elements, along with their row and column indices, drastically reduces the memory required compared to storing every zero in a dense matrix.
- Faster Computation: Many matrix operations (multiplication, addition, inversion) involve iterating through elements. By skipping over zero elements, algorithms can perform these operations significantly faster. This is particularly crucial for real-time applications in autonomous systems.
- Handling Large-Scale Problems: Without sparse matrix techniques, many large-scale problems in areas like mapping, simulation, and machine learning would be computationally intractable due to excessive memory or processing time demands.
Specialized data structures, such as Compressed Sparse Row (CSR), Compressed Sparse Column (CSC), or Dictionary of Keys (DOK), are used to efficiently store and manipulate sparse matrices, ensuring that the benefits of sparsity are fully leveraged.
Driving Autonomous Flight and Navigation with Sparse Techniques
Autonomous flight is perhaps the ultimate manifestation of advanced drone technology, demanding sophisticated algorithms for perception, localization, mapping, and control. Sparse matrices play a pivotal role in enabling these complex capabilities, particularly in areas like Simultaneous Localization and Mapping (SLAM) and sensor fusion.
Simultaneous Localization and Mapping (SLAM)
SLAM algorithms allow a drone to build a map of an unknown environment while simultaneously keeping track of its own location within that map. This is a fundamental challenge for fully autonomous drones operating without external GPS signals or in environments where GPS is denied. Many modern SLAM solutions, especially graph-based SLAM, frame the problem as a large-scale optimization. The drone’s trajectory and the positions of landmarks are represented as nodes in a graph, and measurements (e.g., visual features, LiDAR scans) become edges connecting these nodes.
The resulting system of equations, which needs to be solved to find the optimal drone trajectory and map features, is almost always highly sparse. A drone at a particular pose (location and orientation) only observes nearby landmarks and relates to its immediately preceding and succeeding poses. It does not directly observe or relate to every other landmark or pose from the entire mission. This inherent sparsity is critical:
- Efficiency: Solving dense linear systems of the size encountered in large-scale SLAM would be computationally prohibitive. Sparse matrix solvers efficiently handle these systems, making it feasible to perform real-time or near real-time mapping and localization.
- Scalability: As drones explore larger environments and gather more data, the size of the SLAM problem grows. Sparse techniques ensure that the computational complexity scales more gracefully with the environment size, enabling longer and more complex autonomous missions.
Sensor Fusion and State Estimation
Drones rely on a multitude of sensors – accelerometers, gyroscopes, magnetometers, GPS, altimeters, cameras, LiDAR, and more – to understand their state (position, velocity, orientation). Sensor fusion algorithms combine data from these diverse sources to produce a more robust and accurate estimate than any single sensor could provide alone. Techniques like Kalman filters or particle filters often underpin these systems. While the state vectors themselves might not be sparse, the underlying covariance matrices representing uncertainties, or the Jacobian matrices used in non-linear optimization for state estimation, can exhibit sparsity. When a sensor measurement only influences a specific subset of the drone’s state variables, the corresponding update matrices will be sparse, leading to more efficient computations.

Revolutionizing Drone Mapping and Remote Sensing
Drone technology has transformed mapping and remote sensing, offering unprecedented detail and accessibility. From creating high-resolution 3D models of infrastructure to surveying vast agricultural lands, the amount of data collected is immense. Sparse matrices are instrumental in processing, storing, and analyzing this deluge of information efficiently.
3D Reconstruction and Point Clouds
When a drone performs photogrammetry or uses LiDAR scanners, it generates massive datasets known as point clouds. A point cloud is a collection of data points in a 3D coordinate system, representing the external surface of an object or environment. Most of the 3D space surrounding these points is empty. Representing this vast empty space densely would be incredibly wasteful.
- Efficient Storage and Processing: Sparse matrix structures are ideal for storing point cloud data. Instead of storing zeros for every voxel (3D pixel) in an empty volume, only the voxels containing actual points or occupied space are stored. This significantly reduces memory footprint and allows for faster operations like querying neighboring points or constructing 3D meshes.
- Bundle Adjustment in Photogrammetry: Similar to SLAM, photogrammetry involves solving a large optimization problem called bundle adjustment to refine the 3D positions of points and camera poses from multiple images. The underlying mathematical structure of this problem is inherently sparse, with each image only observing a subset of the 3D points. Sparse matrix solvers are critical for making large-scale 3D reconstructions feasible and accurate.
LiDAR Data Processing
LiDAR (Light Detection and Ranging) sensors emit laser pulses and measure the time it takes for them to return, creating highly accurate 3D point clouds. When a drone surveys an area with LiDAR, it captures millions, sometimes billions, of data points.
- Feature Extraction and Object Detection: Processing raw LiDAR data for features like buildings, vegetation, or power lines often involves density-based clustering or segmentation algorithms. Representing the 3D space sparsely allows these algorithms to operate much more efficiently, focusing computation on regions with data rather than empty space.
- Digital Elevation Models (DEMs) and Terrain Mapping: Creating detailed DEMs from LiDAR data can involve interpolating values across a grid. If the initial LiDAR scan is sparse (e.g., from an airborne platform covering a large area), sparse matrix methods can be used for efficient interpolation and grid generation.
Hyperspectral and Multispectral Imaging Analysis
Drones equipped with hyperspectral or multispectral cameras collect data across many narrow spectral bands, providing rich information about the composition of surfaces. The resulting data cubes (two spatial dimensions, one spectral dimension) can be massive. While the data itself might not be “sparse” in the traditional sense of having many zeros, feature extraction and dimensionality reduction techniques applied to this data often lead to sparse representations. For instance, specific spectral signatures might only be present in a small portion of the data, or sparse component analysis can be used to identify key features efficiently.
The Strategic Advantage: Sparse Matrices in Next-Gen Drone AI
The continued advancement of drone intelligence relies heavily on artificial intelligence and machine learning. From on-board object recognition to predictive maintenance and complex decision-making, AI models are becoming more sophisticated. Sparse matrices offer a strategic advantage in optimizing these AI applications, especially in the context of edge computing on drones.
Efficient Machine Learning Models
Many machine learning algorithms inherently deal with high-dimensional data that can be sparse. For example, in natural language processing (if drones ever process spoken commands or text logs extensively) or graph neural networks used for analyzing complex drone sensor networks, input features often have many zero values.
- Sparse Regularization: Techniques like Lasso Regression or sparse autoencoders promote sparsity in model parameters, leading to simpler, more interpretable models and potentially reducing overfitting.
- Graph Neural Networks (GNNs): As drones might operate in mesh networks or leverage knowledge graphs for decision-making, GNNs are increasingly relevant. The adjacency matrices representing the connections in these graphs are typically sparse, making sparse matrix operations fundamental to GNN training and inference.
Edge Computing and Real-time Decision Making
Drones, particularly smaller ones, have limited computational resources and battery life. Running complex AI models directly on the drone (edge computing) requires extreme efficiency. Sparse matrix computations are critical here:
- Reduced Inference Latency: By avoiding unnecessary computations with zero values, sparse models can perform inferences much faster, enabling real-time object detection, tracking, and autonomous decision-making without relying on constant cloud connectivity.
- Lower Power Consumption: Fewer computations directly translate to lower power consumption, extending flight times and operational endurance for intelligent drones.
- Smaller Model Footprints: Storing sparse weights and activations for neural networks requires less memory, allowing larger or more complex models to fit onto resource-constrained drone processors.
In conclusion, sparse matrices are not merely a mathematical abstraction but a vital enabler for the most sophisticated and efficient drone technologies. From precisely navigating unknown terrains and building intricate 3D maps to powering intelligent AI decisions at the edge, their ability to transform massive, often redundant, datasets into computationally tractable problems is indispensable. As drones continue to push the boundaries of autonomy and data acquisition, the strategic importance of sparse matrix techniques will only grow, cementing their role as a silent hero in the ongoing innovation of aerial systems.