In the rapidly evolving landscape of technology and innovation, particularly concerning autonomous systems, artificial intelligence, and sophisticated data analysis in fields like drone technology, understanding fundamental statistical concepts is paramount. Among these, the standard normal probability distribution stands out as a cornerstone. Far from being a mere academic abstraction, this mathematical construct underpins the reliability, precision, and intelligence embedded in everything from autonomous flight algorithms and predictive maintenance to the robust mapping capabilities of modern drones. It is the silent language that quantifies uncertainty, models expected behavior, and enables systems to make informed decisions in complex and dynamic environments.
At its core, the standard normal probability distribution provides a standardized framework for analyzing data that naturally clusters around an average. Its elegant simplicity belies its profound utility, allowing engineers and data scientists to assess the likelihood of various outcomes, filter noise from critical sensor data, and build predictive models that drive the next generation of tech innovation. Without a solid grasp of this distribution, the sophisticated capabilities we now take for granted in areas like AI follow mode, remote sensing, and precision navigation would be significantly less reliable, if not entirely unachievable.
Unpacking the Standard Normal Distribution: The Foundation of Data Analysis
Before delving into its applications, it’s crucial to understand what the standard normal probability distribution is and why it holds such a pivotal position in statistical analysis. It is a specific instance of the more general normal distribution, often referred to as the “bell curve” due to its distinctive shape.
Defining the Normal Distribution
The normal distribution is a continuous probability distribution that is symmetric about its mean, indicating that data near the mean are more frequent in occurrence than data far from the mean. Many natural phenomena, such as human heights, measurement errors, and even the performance variations of technical components, tend to follow this distribution. It is characterized by two parameters:
- Mean (μ): The average value, representing the center of the distribution.
- Standard Deviation (σ): A measure of the dispersion or spread of the data points around the mean. A smaller standard deviation indicates data points are clustered tightly around the mean, while a larger one suggests they are more spread out.
The “bell curve” shape implies that values closer to the mean are most probable, and probabilities decrease as one moves further away from the mean in either direction.
The Standard Normal Transformation (Z-score)
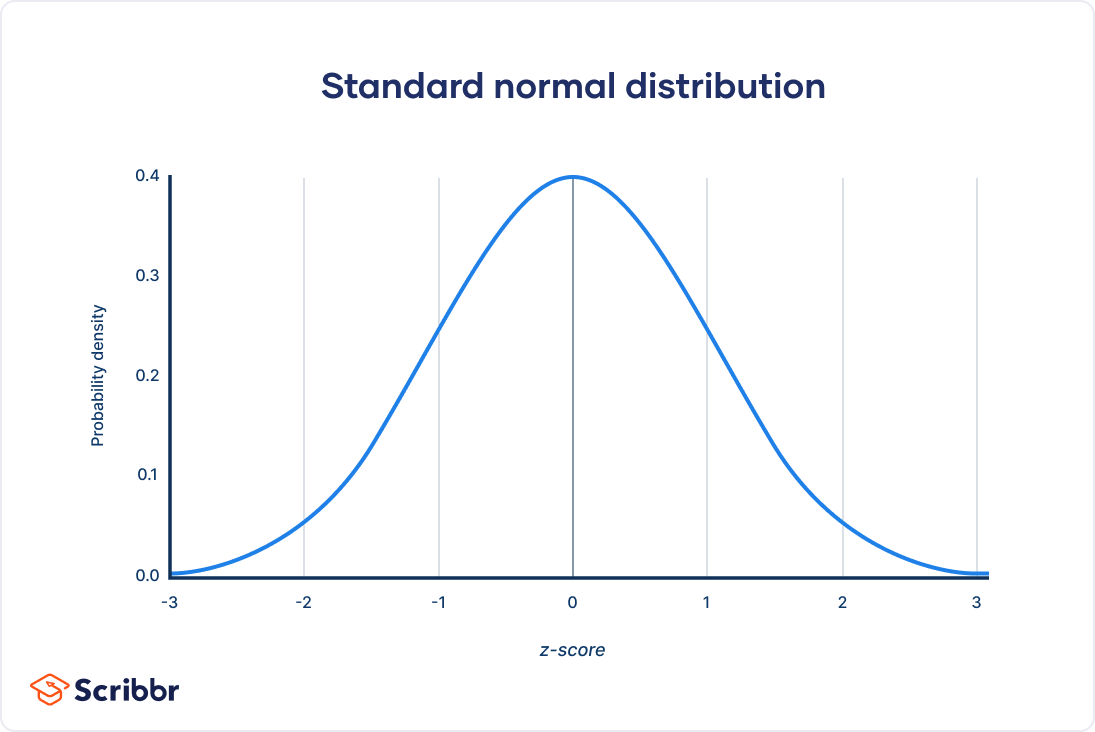
While countless normal distributions exist (each defined by its specific mean and standard deviation), the standard normal distribution is unique. It is a normal distribution with a mean (μ) of 0 and a standard deviation (σ) of 1. This standardization is incredibly powerful because it allows for the comparison and analysis of data from any normal distribution, regardless of its original mean or standard deviation.
The process of transforming any normal variable (X) into a standard normal variable (Z) is done using the Z-score formula:
$Z = (X – μ) / σ$
This transformation essentially measures how many standard deviations an individual data point (X) is away from the mean (μ) of its original distribution. A positive Z-score indicates the value is above the mean, a negative Z-score indicates it’s below the mean, and a Z-score of zero means the value is exactly at the mean. By converting values to Z-scores, we can use a single, universal standard normal table (or computational tools) to find probabilities, making complex calculations universally accessible.
Key Characteristics and Properties
The standard normal distribution possesses several crucial properties that make it invaluable:
- Symmetry: It is perfectly symmetrical around its mean of 0.
- Asymptotic Tails: The tails of the distribution extend infinitely in both directions, approaching, but never quite touching, the horizontal axis, meaning there’s a non-zero probability for even extremely distant values.
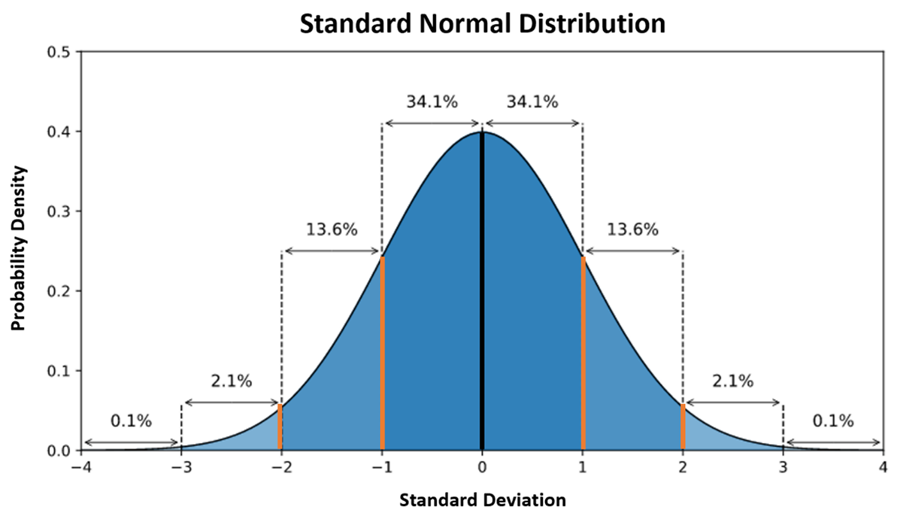
- Empirical Rule (68-95-99.7 Rule): This rule provides a quick estimate of the proportion of data points falling within certain standard deviations from the mean:
- Approximately 68% of the data falls within ±1 standard deviation from the mean.
- Approximately 95% of the data falls within ±2 standard deviations from the mean.
- Approximately 99.7% of the data falls within ±3 standard deviations from the mean.
This rule is particularly useful for setting thresholds for anomaly detection or defining acceptable error margins in technological systems.
Probabilistic Precision: Driving Drone Automation and AI
The theoretical elegance of the standard normal distribution finds its most impactful applications in practical technological domains. In the context of drones and autonomous systems, its ability to model uncertainty and quantify probabilities is foundational to reliable operation.
Sensor Data Filtering and Noise Reduction
Modern drones rely on a myriad of sensors – GPS for positioning, IMUs (Inertial Measurement Units) for orientation, LiDAR and ultrasonic sensors for obstacle detection, and vision sensors for contextual awareness. Each of these sensors produces data that is inherently noisy and subject to errors. These errors often follow a normal distribution. By understanding the mean error and standard deviation of a particular sensor’s readings, engineers can:
- Model Sensor Uncertainty: Quantify the expected range of error for a given sensor reading.
- Implement Robust Filters: Techniques like Kalman filters and their variants (e.g., Extended Kalman Filters, Unscented Kalman Filters) heavily rely on assumptions about the normal distribution of sensor noise and system state errors. These filters merge noisy sensor data with a predictive model of the drone’s motion to produce a more accurate estimate of its true position, velocity, and orientation. This is critical for stable flight and precise navigation, especially when GPS signals are weak or unavailable.
Autonomous Flight Path Optimization and Risk Assessment
Autonomous flight planning involves navigating a drone from a starting point to a destination, often through complex environments, while adhering to various constraints (e.g., battery life, no-fly zones, obstacle avoidance).
- Predicting Deviations: The drone’s predicted trajectory is not absolute; it has a probability distribution around it, typically normal. This allows the system to calculate the probability of deviating from the intended path due to wind, sensor errors, or control inaccuracies.
- Collision Risk Assessment: By modeling the drone’s position uncertainty (often as a Gaussian or normal distribution) and the uncertainty around detected obstacles, the system can probabilistically assess the risk of collision. If the overlap between the drone’s predicted position uncertainty and an obstacle’s space exceeds a certain Z-score threshold, the system can trigger evasive maneuvers. This probabilistic approach is far more sophisticated than simple binary “hit/miss” calculations, allowing for dynamic and adaptive decision-making.
AI Follow Mode and Object Recognition Reliability
Artificial intelligence, particularly machine learning and computer vision, relies heavily on probabilistic models.
- Confidence Scores: When a drone’s AI system identifies a target for “follow mode” or recognizes an object (e.g., a person, a vehicle, a specific landmark), the output is not a definitive “yes” or “no.” Instead, it provides a confidence score, which is a probability. These scores are often interpreted in the context of distributions. A high confidence score indicates a low probability of error, placing the result far into the tail of an error distribution.
- Robust Tracking: For AI follow mode, the system continuously predicts the target’s next position based on its observed motion. The uncertainty in this prediction is often modeled using normal distributions. The drone then positions itself to maintain optimal tracking, ensuring that the target remains within the high-probability region of the camera’s field of view, even if the target’s movement is somewhat unpredictable. The ability to quantify the uncertainty of predictions using normal distributions makes these AI features incredibly robust and adaptive.
Mapping, Remote Sensing, and Data Integrity
Drones are transformative tools for mapping and remote sensing, collecting vast amounts of geospatial data. The integrity and accuracy of this data are crucial, and here too, the standard normal distribution plays a critical role.
Geospatial Data Accuracy and Error Modeling
Photogrammetry and LiDAR scanning performed by drones generate detailed 3D maps and point clouds. However, no measurement is perfect.
- Quantifying Measurement Error: Errors in drone-based mapping, stemming from GPS inaccuracies, camera lens distortions, or sensor noise, often exhibit a normal distribution. Understanding this allows mapping professionals to quantify the uncertainty associated with their measurements, providing error bars or confidence intervals for the generated maps. For instance, a point on a map might be stated to be at a certain coordinate with a 95% confidence that its true position lies within a 1-meter radius, derived directly from the properties of the normal distribution (specifically, within approximately 2 standard deviations).
- Error Propagation: When multiple measurements are combined (e.g., stitching together many drone images), errors from each measurement propagate. Statistical methods, often relying on normal distribution assumptions, are used to model how these errors accumulate and to estimate the overall accuracy of the final map product.
Anomaly Detection in Remote Sensing
Remote sensing data, whether multispectral images for agriculture or thermal scans for infrastructure inspection, often involves identifying deviations from expected patterns.
- Establishing Baselines: For a healthy crop field or an efficiently operating solar panel, certain spectral signatures or temperature profiles are considered “normal.” These normal readings can often be modeled by a normal distribution.
- Identifying Anomalies: Deviations that fall significantly outside the typical range (e.g., more than 2 or 3 standard deviations from the mean) can signal an anomaly – a stressed plant, a faulty solar cell, or a leak in a pipeline. The Z-score becomes a powerful tool here, allowing systems to flag data points that are statistically improbable under normal conditions, prompting further investigation. This allows for proactive intervention in agriculture, infrastructure maintenance, and environmental monitoring.
Quality Control in Data Acquisition
Ensuring the consistency and reliability of data collected by drones is vital for any application.
- Statistical Process Control (SPC): SPC charts, often based on the principles of the normal distribution, are used to monitor key parameters during data acquisition missions. For example, monitoring GPS signal strength, flight altitude consistency, or image overlap ratios. If these parameters consistently fall outside established control limits (defined by standard deviations from the mean), it indicates a process going “out of control,” potentially compromising data quality.
- Data Validation: Post-mission, collected data can be subjected to statistical tests that assume normality to validate its quality. For instance, checking the distribution of ground control point (GCP) residuals to ensure they are randomly distributed and within acceptable error bounds.
Predictive Maintenance and System Reliability
Beyond real-time operation and data collection, the standard normal distribution is instrumental in the lifecycle management of drone fleets, enhancing their longevity and operational efficiency.
Component Lifetime Prediction
Mechanical and electronic components in drones (e.g., motors, batteries, propellers) have finite lifespans. The wear and tear, or “time to failure,” for many components often follows a normal distribution or related distributions (like the Weibull distribution, which is often approximated by the normal distribution under certain conditions).
- Scheduling Maintenance: By understanding the statistical distribution of component lifespans, operators can predict when parts are most likely to fail. This enables proactive, predictive maintenance schedules rather than reactive repairs, minimizing downtime and reducing the risk of in-flight failures. For example, if drone motors typically last 500 hours with a standard deviation of 50 hours, an operator might schedule replacement at 400 hours, knowing that only a very small percentage would fail before that point (based on Z-score calculations).
System Performance Monitoring
Continuous monitoring of drone system parameters (e.g., motor temperatures, current draw, vibration levels) is crucial for identifying potential issues before they escalate.
- Establishing Baselines and Thresholds: Normal operating conditions for these parameters can be characterized by normal distributions. Any readings that deviate significantly (e.g., more than 3 standard deviations from the mean) can indicate an impending fault or performance degradation. Automated systems can alert operators, allowing for timely intervention. This approach is a core part of advanced diagnostics and health monitoring systems in autonomous vehicles.
The Future: Smarter, Safer, More Autonomous Drones
As drone technology continues to advance, the role of probabilistic reasoning, heavily reliant on the standard normal distribution, will only become more pronounced.
Enhanced Decision-Making in Complex Environments
Future drones will operate in increasingly complex, unstructured, and dynamic environments, from urban air mobility to disaster response. The ability to quantify uncertainty for every sensor reading, every predictive model, and every decision point will be crucial. Probabilistic frameworks, rooted in normal distributions, will enable drones to:
- Navigate with Greater Autonomy: Make nuanced decisions, such as choosing between a slightly riskier but faster route versus a safer but longer one, based on real-time probability assessments.
- Adapt to Unforeseen Circumstances: Respond intelligently to sudden changes, like unexpected weather patterns or the emergence of new obstacles, by recalculating probabilities and adjusting plans on the fly.
Advancements in AI and Machine Learning
The rapid evolution of AI and machine learning will further integrate statistical distributions. Deep learning models, while often opaque, still rely on underlying statistical principles to interpret data and generate predictions. Understanding the uncertainty of these predictions, often expressed probabilistically using techniques derived from normal distributions, will be key to building more trustworthy and explainable AI systems for drones. This will pave the way for true autonomous decision-making where drones can learn, adapt, and operate with minimal human intervention.
Conclusion
The standard normal probability distribution, often perceived as a dry statistical concept, is in reality an invisible yet indispensable backbone of modern tech and innovation, particularly in the realm of drone technology. From the precise navigation of autonomous flights and the intelligent recognition capabilities of AI to the meticulous accuracy of geospatial mapping and the foresight of predictive maintenance, its principles are deeply embedded. By providing a universal language to quantify uncertainty, model variability, and assess probabilities, it empowers engineers and data scientists to build systems that are not only more reliable and efficient but also inherently smarter and safer. As technology continues its relentless march forward, the standard normal distribution will remain a foundational element, enabling the next generation of intelligent, autonomous, and groundbreaking innovations.