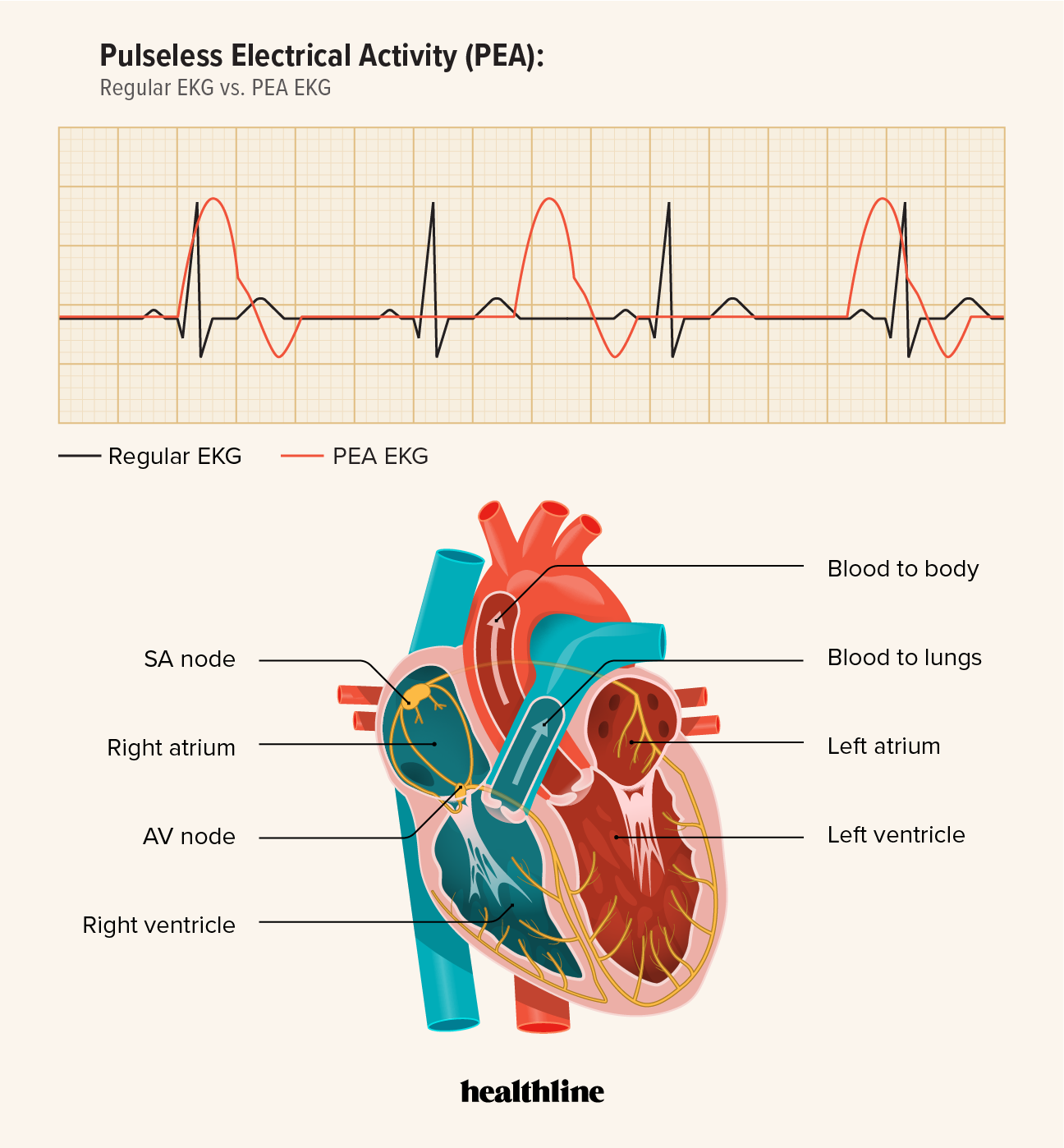
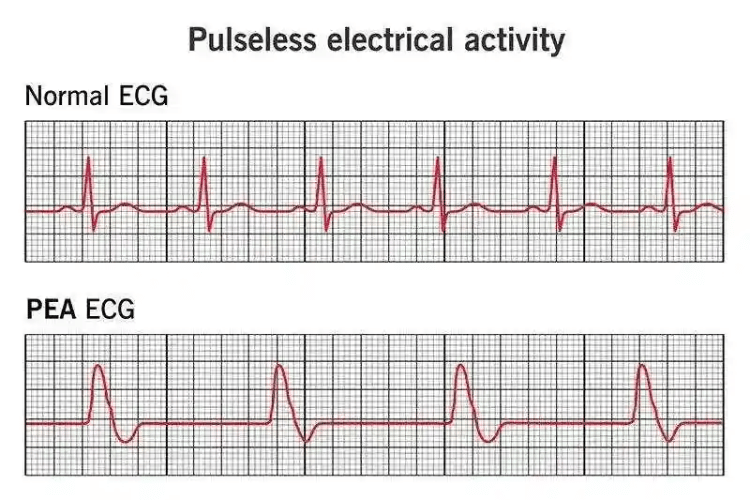
In the intricate world of drone technology, where complex electrical signals govern every movement and decision, the concept of “Pulseless Electrical Activity” (PEA) takes on a profound, albeit metaphorical, significance. Traditionally a medical term denoting a critical cardiac state, within advanced robotics and Unmanned Aerial Systems (UAS), PEA can describe a similarly dire operational paradox: a drone that exhibits internal electrical activity—power flowing, processors humming, indicator lights glowing—yet fails to perform its core functions. It’s a state where the system is “electrically alive” but functionally “inert,” presenting a unique and challenging failure mode that demands innovative diagnostic and preventative solutions within the realm of tech and innovation.
Imagine a sophisticated drone, powered up, seemingly ready for flight. Its internal circuits are energized, diagnostic LEDs blink reassuringly, and perhaps even some telemetry data is being transmitted. However, when the pilot issues a command, the rotors remain motionless, the control surfaces unresponsive, and the payload inactive. This is the essence of PEA in drone systems: the “pulse” of operational output is absent despite clear signs of internal electrical activity. Understanding this failure mode is crucial for advancing drone reliability, safety, and autonomy, pushing the boundaries of system diagnostics and resilient design.
The Paradox of Latent Power: Understanding P.E.A. in UAVs
The phenomenon of PEA in drone systems represents a critical disjunction between internal system vitality and external functional inertness. It’s a scenario where the intricate network of microcontrollers, sensors, and communication buses within a UAV is actively powered and seemingly engaged, yet the system’s ability to execute its primary objectives—flight, data collection, payload deployment—is completely compromised. This paradox goes beyond simple power loss or component failure; it points to a deeper, more insidious form of operational incapacitation that requires sophisticated understanding and innovative solutions.
Distinguishing P.E.A. from Total Power Failure
It is vital to differentiate PEA from a straightforward total power failure. In the event of a dead battery or a catastrophic power system fault, a drone would be entirely inert—no lights, no sounds, no internal activity whatsoever. PEA, in contrast, implies that the drone’s power source is functional, and a significant portion of its electrical components are receiving power and executing internal processes. The distinction lies in the efficacy of this electrical activity. A drone experiencing PEA might have its flight controller powered on, running its operating system, and perhaps even logging errors internally, but critically, it fails to translate these internal states into external actions. This subtle but profound difference makes PEA particularly challenging to diagnose, as the apparent “life” within the system can mask the underlying functional “death.” For instance, a GPS module might be powered and receiving satellite signals, but its data isn’t reaching the flight controller to enable navigation, or the flight controller is unable to send commands to the ESCs (Electronic Speed Controllers) to spin the motors. This ‘silent paralysis’ demands more advanced diagnostic capabilities than simply checking if the drone powers on.
The Silent Scream: Symptoms of P.E.A.
Identifying PEA in a drone often requires a keen eye for subtle inconsistencies, as the most obvious sign—lack of expected action—is accompanied by misleading indicators of internal activity. A pilot might observe the drone’s indicator lights blinking or remaining steady, suggesting power is present and the system is attempting to initialize. Yet, upon issuing flight commands, the rotors remain stubbornly still. There might be no audible cues from the motors, no gyroscopic corrections from the flight controller, and no response from control inputs. Telemetry data might be sporadic, frozen, or indicate nominal internal states while external reality contradicts it. Advanced onboard diagnostic systems, if functioning, might log cryptic errors or enter a fail-safe mode, but the immediate, observable symptom is a drone that is awake but unresponsive, silently screaming for attention without the capacity to act. This “silent scream” underscores the need for proactive monitoring and intelligent fault detection that can discern between normal operation and this peculiar state of functional stasis.
Root Causes of P.E.A. in Drone Tech
Understanding the underlying causes of PEA in drone systems is paramount for developing robust, reliable, and safe autonomous platforms. Given its definition as internal electrical activity without external functional output, the causes typically reside at critical junctures where processing meets action, or where data integrity is compromised. These can range from subtle software bugs to catastrophic hardware failures and intricate communication disruptions.
Software Glitches and Firmware Corruption
The “brain” of any modern drone is its flight controller, powered by complex firmware and software. A significant cause of PEA can be found in this digital realm. Corrupted firmware, critical software bugs, or unexpected logic errors can lead the flight controller to a state where it is powered on and executing code, but that code either contains a fatal flaw, enters an infinite loop, or loses the ability to properly interface with the drone’s actuators. For instance, a bug might prevent the flight controller from initializing the ESCs, even though it’s receiving pilot commands and processing sensor data. Similarly, a security feature triggered by an unusual sensor input might put the system into a safe mode that inhibits all motor output while appearing fully powered. The system is “thinking,” but its thoughts are either flawed or unable to translate into physical commands, resulting in the drone’s operational paralysis.
Critical Hardware Failures
While a total hardware failure might lead to a complete power outage, specific, localized hardware failures can precipitate PEA. For example, the malfunction of an Electronic Speed Controller (ESC) or all ESCs simultaneously, while the flight controller remains operational, would result in motors failing to spin despite receiving valid commands. Similarly, damage to specific output pins on the flight controller that connect to the ESCs or other actuators could sever the command pathway. A failure in a power distribution board that selectively cuts power to critical actuators but leaves the flight controller energized is another possibility. These “surgical” hardware failures prevent critical components from receiving or acting upon the commands generated by an otherwise active electrical system, leaving the drone in a state of internal animation but external immobility.
Communication Bus Malfunctions
Modern drones rely heavily on internal communication buses (e.g., I2C, SPI, UART, CAN bus) to exchange data between the flight controller, sensors, ESCs, GPS modules, and other peripherals. A malfunction in one of these critical communication pathways can induce PEA. If the bus linking the flight controller to the ESCs becomes corrupted or physically damaged, commands to spin the motors might never reach their destination, even if the flight controller is actively generating them. Similarly, if vital sensor data (e.g., IMU, barometer) fails to reach the flight controller due to a bus error, the system might refuse to arm or initiate flight due to a perceived unsafe state, while still being otherwise powered. These communication breakdowns act as literal disconnects between the drone’s “thinking” and “doing,” preventing coordinated action despite internal electrical activity.
Sensor Input Discrepancies Leading to Safety Lockouts
Drones are equipped with numerous sensors that provide critical data for safe operation—accelerometers, gyroscopes, magnetometers, barometers, and GPS. If these sensors provide highly improbable, conflicting, or out-of-range data, the drone’s flight control software is often programmed to enter a safety lockout state. For instance, if a drone detects impossible acceleration values while on the ground, or contradictory altitude readings, it might refuse to arm its motors. In such a scenario, the drone’s electrical systems are fully operational, processing sensor data and executing safety protocols, but its functional output (motor activation) is deliberately inhibited to prevent an unsafe condition. This form of PEA is a protective mechanism, where the “pulse” is intentionally suppressed due to perceived environmental or internal anomalies, highlighting the sophisticated interplay between sensor integrity and operational readiness.
Diagnostic Approaches and Mitigation Strategies
Addressing PEA in drone systems requires a multifaceted approach that combines advanced diagnostic capabilities with intelligent design and proactive prevention. Since PEA can manifest subtly, often masquerading as a less severe issue, the strategies employed must be robust and capable of pinpointing the exact locus of failure within a complex electrical and software ecosystem.
Onboard Diagnostics and Telemetry Analysis
The first line of defense against PEA is sophisticated onboard diagnostic systems. These systems should continuously monitor not just the presence of power, but the health and activity of critical subsystems. This includes monitoring voltage and current draws, data integrity across communication buses, and the operational status of key components like ESCs and motors. When a PEA-like state occurs, the drone’s flight controller should be capable of logging detailed error codes, system states, and sensor readouts that can be later retrieved. Real-time telemetry is also crucial; operators should be able to see not just that the drone is powered, but that its motors are ready, its sensors are providing valid data, and its flight controller is actively commanding the system. AI-powered anomaly detection in telemetry streams could highlight discrepancies that indicate PEA, such as commands being issued without corresponding changes in actuator status.
Redundancy in Critical Subsystems
To mitigate the impact of single points of failure that can lead to PEA, implementing redundancy in critical subsystems is a powerful strategy. For example, dual flight controllers can be configured in a hot-standby arrangement, allowing one to take over seamlessly if the primary one develops a software glitch or hardware fault leading to PEA. Redundant communication buses can ensure that commands and data can still flow even if one bus fails. Power distribution to critical components can also be designed with redundancy. While full redundancy for every component might be impractical for all drones, identifying the most common or catastrophic failure points leading to PEA allows for strategic implementation of redundant systems, enhancing overall system resilience and preventing operational paralysis.
Advanced Error Handling and Recovery Protocols
Beyond diagnostics, a drone’s software architecture must incorporate advanced error handling and autonomous recovery protocols. When a PEA state is detected, the system should ideally attempt self-correction. This might include automatically restarting specific modules (e.g., ESCs, sensor hubs), cycling power to peripherals, or initiating a soft reboot of the flight controller if it detects an unresponsive state. Safe mode capabilities, where the drone attempts to revert to a minimal, stable operational state, can prevent further damage or loss. For instance, if a flight controller detects a communication error preventing motor control, it could attempt to reset the communication bus and then re-evaluate its state before attempting to arm. These intelligent recovery mechanisms are vital for minimizing downtime and potentially saving the drone from complete incapacitation.
The Future of System Resilience: Preventing P.E.A.
As drone technology evolves, so too must our approaches to preventing complex failure modes like PEA. The future of system resilience lies in proactive, intelligent, and self-healing designs that anticipate potential points of failure and integrate robust preventative measures. This represents a significant area of innovation, pushing the boundaries of what autonomous systems can achieve in terms of reliability and safety.
AI-Driven Anomaly Detection
One of the most promising avenues for preventing PEA is the deployment of AI-driven anomaly detection systems. Machine learning models can be trained on vast datasets of normal drone operation and known failure modes. These AI systems can continuously monitor hundreds of data points—from current draws and CPU loads to sensor outputs and communication bus traffic—in real-time. By identifying subtle deviations from established baselines or patterns indicative of impending PEA, AI can provide early warnings, allowing for predictive maintenance or even autonomous self-correction before a full PEA state manifests. For instance, a slight increase in latency on a critical communication bus, combined with erratic sensor readings, might trigger an AI alert long before the drone becomes functionally paralyzed.
Modular Design and Hot-Swappable Components
Designing drones with modular, hot-swappable components can drastically improve recovery from hardware-induced PEA. If a specific ESC or sensor module is identified as the culprit behind an operational paralysis, a modular design allows for rapid isolation and replacement, often without needing to fully power down the entire system. This not only simplifies maintenance but also increases the potential for autonomous self-repair in larger, more complex drone systems. Future drones could feature intelligent power routing and communication switching, allowing the flight controller to dynamically bypass or disable a faulty module and potentially enable a backup, moving towards a truly resilient and adaptable architecture.
Self-Healing Architectures
The pinnacle of PEA prevention lies in the development of self-healing architectures. These are drone systems capable of autonomously reconfiguring themselves in response to detected failures. Imagine a drone that, upon detecting a failure in its primary communication bus leading to PEA, automatically switches to a redundant bus, re-routes commands, or even dynamically adjusts its software configuration to operate with degraded, but functional, components. This involves not just redundancy, but intelligent decision-making at the architectural level, allowing the drone to adapt its structure and behavior to maintain critical functionality despite internal faults. Such systems would leverage advanced control theory, AI, and distributed processing to ensure that even when parts of the system are electrically active but functionally impaired, the overall mission can still be accomplished, albeit perhaps with altered performance.
Conclusion
The concept of “Pulseless Electrical Activity” in drone systems, while a metaphorical adaptation of a medical term, offers a critical framework for understanding a particularly challenging class of operational failures within advanced technology and innovation. It highlights the perplexing scenario where a drone’s internal electrical systems are alive and active, yet its ability to perform its core functions is completely compromised. Addressing PEA demands a holistic approach, encompassing sophisticated onboard diagnostics, strategic redundancy in critical subsystems, and intelligent error handling. Looking to the future, AI-driven anomaly detection, modular and hot-swappable designs, and truly self-healing architectures represent the vanguard of innovation in ensuring drone reliability and resilience. By proactively tackling the paradox of latent power, we can pave the way for a new generation of drones that are not only intelligent and autonomous but also profoundly robust and dependable, even in the face of complex internal challenges.