Matrix multiplication, a fundamental operation in linear algebra, is a powerful tool with far-reaching applications across numerous scientific and technological fields. While its mathematical underpinnings can seem abstract, understanding matrix multiplication is crucial for anyone delving into advanced topics like artificial intelligence, computer graphics, and, importantly for our discussion, the sophisticated flight control systems that power modern drones. This operation allows us to combine and transform data in ways that are essential for complex calculations, from calculating precise movements to interpreting sensor data.
At its core, matrix multiplication is a binary operation that produces a single matrix from two matrices. However, it’s not as simple as element-wise multiplication. The process involves a specific, ordered sequence of multiplications and additions, governed by strict rules. For two matrices, A and B, to be multiplicable, the number of columns in the first matrix (A) must equal the number of rows in the second matrix (B). If matrix A has dimensions m x n (m rows and n columns) and matrix B has dimensions n x p (n rows and p columns), the resulting matrix C will have dimensions m x p.
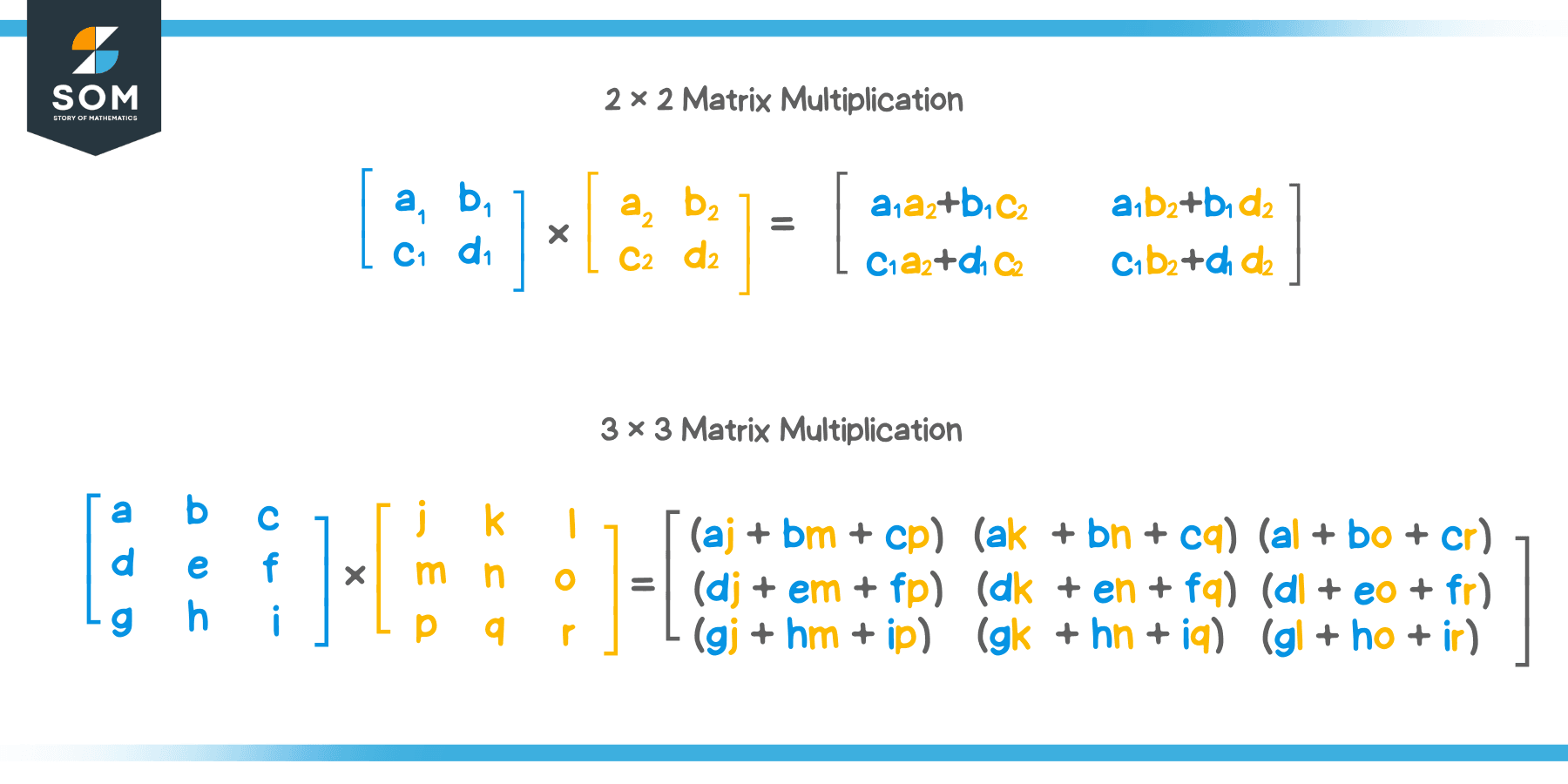
The calculation of each element in the resulting matrix C is determined by the dot product of a row from matrix A and a column from matrix B. Specifically, the element at row i and column j of matrix C (denoted as Cij) is computed by multiplying each element in the i-th row of matrix A by the corresponding element in the j-th column of matrix B, and then summing these products. This systematic approach ensures that the inherent relationships and transformations represented by the matrices are preserved and combined appropriately in the product.
The Mechanics of Matrix Multiplication
Let’s break down the process with a concrete example. Suppose we have matrix A:
$$A = begin{pmatrix} a{11} & a{12} & a{13} a{21} & a{22} & a{23} end{pmatrix}$$
This is a 2×3 matrix (2 rows, 3 columns).
And matrix B:
$$B = begin{pmatrix} b{11} & b{12} b{21} & b{22} b{31} & b{32} end{pmatrix}$$
This is a 3×2 matrix (3 rows, 2 columns).
Since the number of columns in A (3) equals the number of rows in B (3), we can multiply them. The resulting matrix C will have dimensions 2×2.
$$C = AB = begin{pmatrix} c{11} & c{12} c{21} & c{22} end{pmatrix}$$
Now, let’s calculate each element of C:
Calculating C11
To find C11, we take the dot product of the first row of A and the first column of B:
$$c{11} = (a{11} times b{11}) + (a{12} times b{21}) + (a{13} times b_{31})$$
Calculating C12
To find C12, we take the dot product of the first row of A and the second column of B:
$$c{12} = (a{11} times b{12}) + (a{12} times b{22}) + (a{13} times b_{32})$$
Calculating C21
To find C21, we take the dot product of the second row of A and the first column of B:
$$c{21} = (a{21} times b{11}) + (a{22} times b{21}) + (a{23} times b_{31})$$
Calculating C22
To find C22, we take the dot product of the second row of A and the second column of B:
$$c{22} = (a{21} times b{12}) + (a{22} times b{22}) + (a{23} times b_{32})$$
This element-wise calculation, repeated for every position in the resulting matrix, is the essence of matrix multiplication. The order of operations is critical; matrix multiplication is not commutative, meaning AB is generally not equal to BA.
Properties of Matrix Multiplication
Matrix multiplication possesses several important properties that make it a versatile mathematical tool:

Associativity
One of the key properties is associativity. This means that when multiplying three or more matrices, the way they are grouped does not affect the final result, as long as the order of the matrices remains the same. Mathematically, if matrices A, B, and C are compatible for multiplication, then:
$$(AB)C = A(BC)$$
This property is extremely useful in complex computational pipelines, allowing for the optimization of calculation sequences.
Distributivity
Matrix multiplication also distributes over matrix addition and subtraction. This means that multiplying a matrix by the sum or difference of two other matrices is equivalent to the sum or difference of the products of the first matrix with each of the other matrices.
For addition:
$$A(B + C) = AB + AC$$
$$(A + B)C = AC + BC$$
For subtraction:
$$A(B – C) = AB – AC$$
$$(A – B)C = AC – BC$$
These distributive properties are fundamental for manipulating matrix equations and deriving insights from them.
Identity Matrix
The identity matrix, denoted by I, plays a role analogous to the number 1 in scalar multiplication. An identity matrix is a square matrix (same number of rows and columns) with ones on the main diagonal and zeros elsewhere. For any matrix A compatible with the identity matrix I, the following holds true:
$$AI = IA = A$$
This means multiplying a matrix by the identity matrix does not change the matrix itself. The dimensions of the identity matrix must be chosen appropriately to ensure compatibility for multiplication.
Non-Commutativity
As mentioned earlier, a crucial characteristic of matrix multiplication is its non-commutative nature. In general, for matrices A and B, $AB neq BA$. This means the order in which matrices are multiplied significantly impacts the outcome. This property is not a limitation but rather a reflection of the fact that matrix multiplication often represents sequential transformations, where the order of these transformations matters.
Applications in Flight Technology and Drone Systems
The intricate world of flight technology and drone operation relies heavily on matrix multiplication, particularly within their navigation, control, and sensor processing systems. Understanding how matrices are manipulated allows us to grasp the underlying logic behind a drone’s ability to fly stably, avoid obstacles, and execute complex maneuvers.
Navigation and Kinematics
When a drone navigates, its position, orientation, and velocity are constantly being updated. These states are often represented using vectors, and transformations between different coordinate frames (e.g., from the drone’s body frame to the Earth’s inertial frame) are handled through rotation matrices. Multiplying the current state vector by a rotation matrix allows the system to accurately represent the drone’s orientation in space.
Furthermore, when calculating future positions based on current velocity and time increments, matrix multiplication is used. If a drone’s velocity is represented by a vector, and we want to determine its displacement over a short period, this involves applying a transformation that essentially “scales” the velocity by the time interval, often embedded within a larger state transition matrix that also incorporates other dynamic factors.
Sensor Data Fusion and Interpretation
Modern drones are equipped with a suite of sensors, including accelerometers, gyroscopes, magnetometers, GPS receivers, and vision systems. The data from these sensors must be integrated and interpreted to provide a coherent understanding of the drone’s environment and its own state. Matrix operations, including multiplication, are fundamental to this data fusion process.
For instance, a Kalman filter, a widely used algorithm for state estimation, extensively employs matrix operations. It uses matrices to represent the process model (how the drone’s state changes over time), the measurement model (how sensor readings relate to the drone’s state), and the uncertainties associated with these models. Matrix multiplication is essential for updating the estimated state and its covariance based on new sensor measurements.
Control Systems and Stabilization
Maintaining a stable flight path, especially in turbulent conditions, requires sophisticated control algorithms. These algorithms often operate in a state-space representation, where the drone’s behavior is described by a set of linear differential equations. The solutions to these equations, and the subsequent control actions, are heavily reliant on matrix manipulations.
For example, to determine the necessary adjustments to the drone’s motors to counteract an unwanted pitch or roll, the control system might use a matrix to map the error in orientation (detected by gyroscopes) to the required motor thrust adjustments. This mapping is a direct application of matrix multiplication. Similarly, in advanced autonomous flight, algorithms that plan and execute flight paths might represent the desired trajectory and the drone’s current capabilities as matrices, using matrix multiplication to calculate the control inputs needed to follow the path accurately.

Computer Vision and Object Recognition
For drones equipped with cameras, especially those involved in tasks like mapping, surveillance, or inspection, computer vision algorithms are paramount. Many of these algorithms, such as those used for image transformation, feature detection, and object recognition, leverage matrix multiplication extensively.
For example, when applying geometric transformations to an image (like scaling, rotation, or translation) to align it with a reference or to correct for camera movement, these transformations are represented by matrices. Multiplying the pixel coordinates (represented as vectors) by these transformation matrices allows for the efficient and accurate manipulation of the image data. In deep learning models for object recognition, which are increasingly being deployed on drones for autonomous tasks, matrix multiplication is the core operation within the neural network layers. The weights of the network are stored in matrices, and the input data (or intermediate representations) are multiplied by these weight matrices to process information and make predictions.
In essence, matrix multiplication provides the mathematical framework for translating abstract concepts like rotation, scaling, linear transformations, and data integration into concrete computational steps that enable drones to fly intelligently, navigate precisely, and interact meaningfully with their environment. Its role in flight technology underscores its importance beyond pure mathematics, making it a vital component in the engineering of advanced aerial systems.