Depth-First Search (DFS) is a fundamental graph traversal algorithm, a cornerstone in computer science that finds extensive applications in fields like artificial intelligence, pathfinding, and network analysis. While not directly a drone hardware component, DFS plays a crucial role in the intelligent behavior and decision-making processes that enable drones to navigate complex environments, perform autonomous tasks, and optimize their operations. Understanding DFS is key to appreciating the sophisticated algorithms that underpin modern drone technology, particularly in areas such as autonomous flight, mapping, and remote sensing.
Understanding the Core Concept of DFS
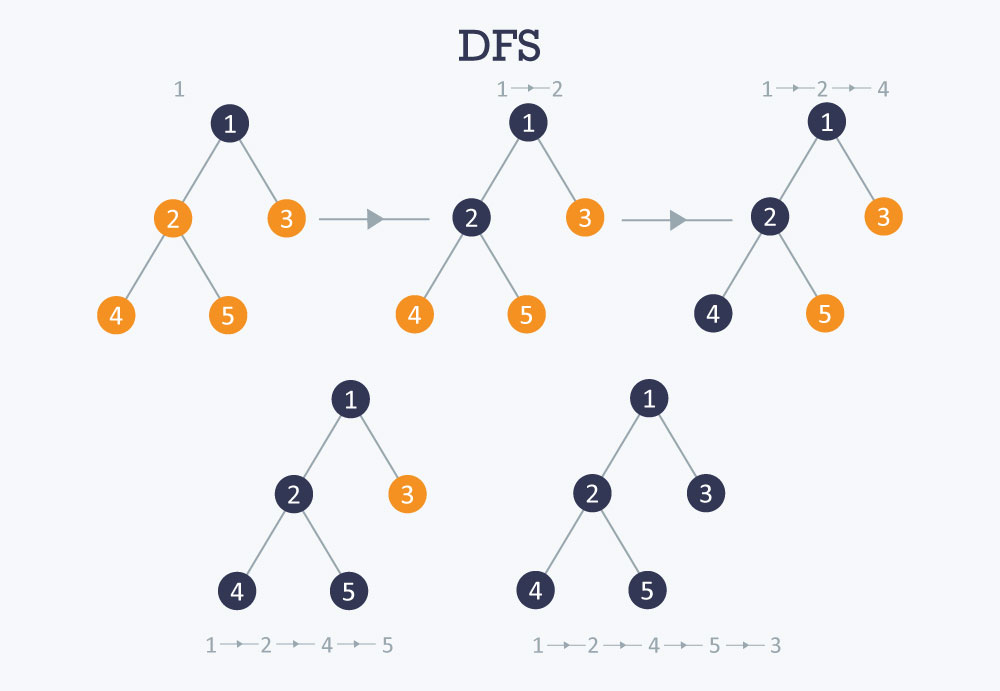
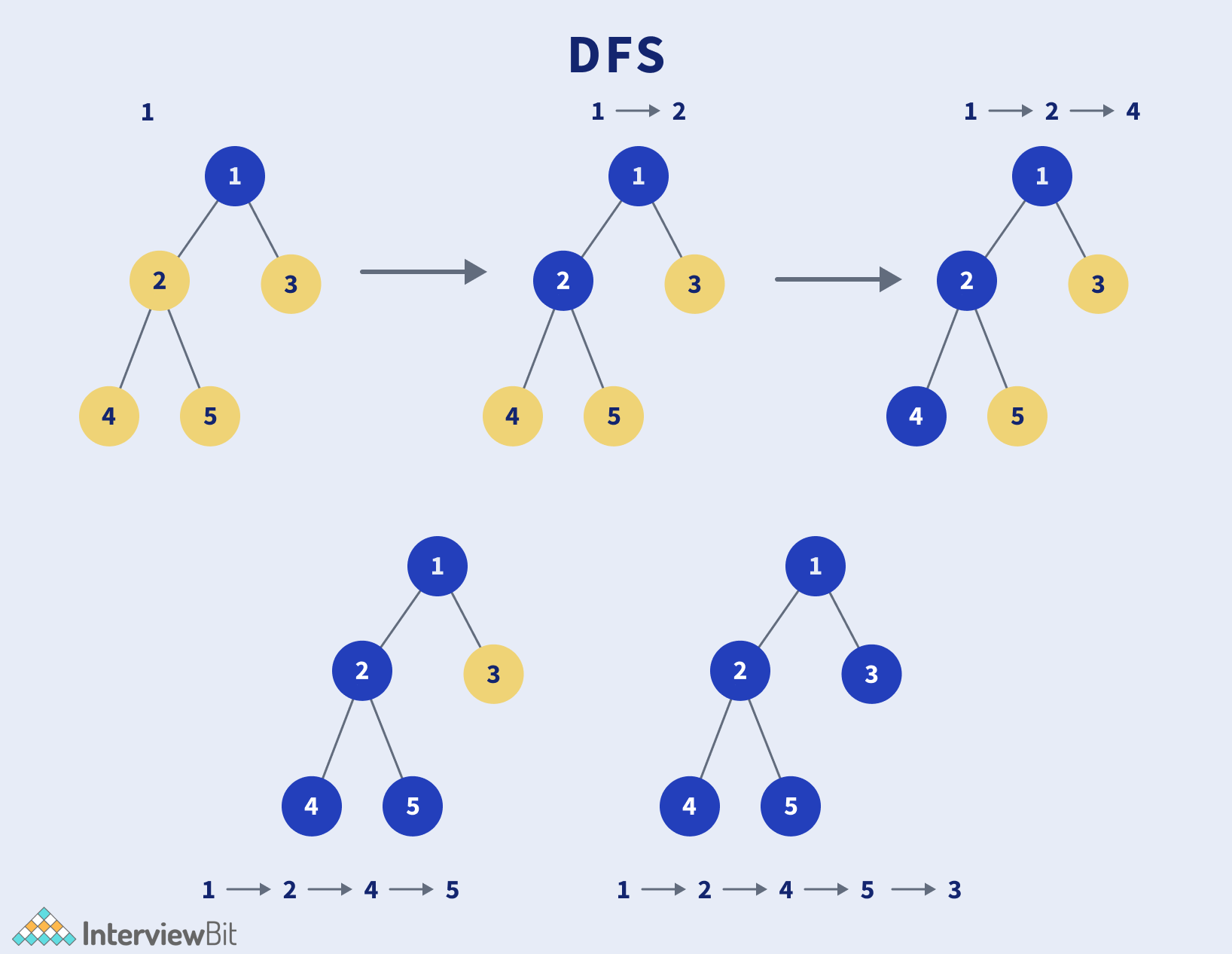
At its heart, Depth-First Search is an algorithm for traversing or searching tree or graph data structures. It starts at a root node (or an arbitrary node in a graph) and explores as far as possible along each branch before backtracking. Imagine exploring a maze: you pick a path and follow it until you hit a dead end. Then, you backtrack to the last junction where you had a choice and try a different path. This process continues until you’ve explored all possible paths or found your target.
How DFS Works: A Step-by-Step Approach
The execution of DFS can be broken down into a series of recursive or iterative steps. The fundamental principle involves maintaining a “visited” set to avoid infinite loops in graphs with cycles and to ensure each node is processed only once.
Recursive DFS:
- Start Node: Begin at a chosen starting node.
- Mark as Visited: Mark the current node as visited.
- Process Node: Perform any desired action with the current node (e.g., add it to a path, check its properties).
- Explore Neighbors: For each unvisited neighbor of the current node:
- Recursively call the DFS function on that neighbor.
- Backtrack: Once all neighbors have been explored, the function returns, effectively backtracking to the previous node.
Iterative DFS (using a Stack):
- Initialization: Create a stack and push the starting node onto it.
- Loop: While the stack is not empty:
- Pop Node: Pop a node from the top of the stack.
- Check if Visited: If the node has not been visited:
- Mark as Visited: Mark the node as visited.
- Process Node: Perform the desired action with the node.
- Push Neighbors: For each neighbor of the popped node, push it onto the stack. (The order in which neighbors are pushed can influence the exact traversal path, but the core principle remains.)
The key difference between the recursive and iterative approaches lies in how the “call stack” or an explicit stack is managed. Recursion implicitly uses the call stack, while the iterative method uses a data structure explicitly. Both achieve the same traversal outcome.
Key Data Structures and Concepts
DFS relies on a few core concepts:
- Graph Representation: Graphs are typically represented using adjacency lists or adjacency matrices. An adjacency list is often preferred for sparse graphs (graphs with relatively few edges compared to the number of vertices), which are common in many real-world applications, including pathfinding for drones.
- Stack: As demonstrated in the iterative approach, a stack (Last-In, First-Out – LIFO) is essential for keeping track of the nodes to visit.
- Visited Set: A set or boolean array is used to keep track of nodes that have already been visited. This prevents cycles and redundant processing.
Applications of DFS in Drone Technology
While DFS is an abstract algorithm, its principles are deeply embedded in various aspects of drone operation, particularly in enabling intelligent and autonomous capabilities.
Autonomous Navigation and Pathfinding
One of the most direct applications of DFS in drone technology is in autonomous navigation and pathfinding. When a drone needs to move from a starting point to a destination while avoiding obstacles, DFS can be employed to find a viable path.
Obstacle Avoidance and Mapping
In complex, unknown environments, drones often build a map as they navigate. DFS can be used in conjunction with mapping algorithms. As the drone explores, it can use DFS to systematically search for unexplored areas or to find the safest route around detected obstacles. The drone’s onboard sensors (LiDAR, cameras, ultrasonic sensors) provide the information about the environment, which is then translated into a graph representation. DFS can then explore this graph to identify paths that maximize safety and efficiency.
- Graph Construction: The environment can be discretized into a grid or a set of waypoints. Each cell or waypoint becomes a node in the graph, and connections (edges) exist between adjacent, traversable cells or waypoints.
- Path Exploration: DFS can be used to explore potential paths from the drone’s current location to a target destination. It will prioritize going deeper into unexplored regions or towards the target, backtracking only when it encounters an obstacle or a dead end.
- Optimality Considerations: Standard DFS finds a path, not necessarily the shortest or most optimal one. For optimal pathfinding, DFS is often combined with or serves as a precursor to algorithms like A* (A-star), which use heuristics to guide the search towards the goal more efficiently and guarantee the shortest path in many scenarios.
Exploration and Reconnaissance
DFS is inherently suited for exploration tasks. When a drone is deployed for reconnaissance or search-and-rescue missions in a large or unknown area, DFS can guide its systematic coverage of the territory.
Systematic Area Coverage
Imagine a drone tasked with surveying an area for anomalies or potential targets. Using DFS, the drone can be programmed to explore the area by moving from one region to another, prioritizing depth of exploration before widening its search. This ensures that no part of the designated area is overlooked.
- Defining Search Regions: The target area can be divided into a grid or a series of interconnected sub-regions. Each sub-region can be considered a node in a graph.
- Traversal Strategy: DFS would explore one sub-region thoroughly before moving to a neighboring one. If a sub-region is fully explored (e.g., all its internal points scanned or sampled), DFS would backtrack to the previous sub-region to explore its remaining unvisited neighbors.

Network Analysis and Connectivity
Beyond direct navigation, the principles of DFS are vital for understanding the connectivity and structure of networks, which can indirectly influence drone operations.
Communication Network Analysis
Drones often operate within a mesh network for communication and data relay. Understanding the topology of this network is crucial for ensuring robust command and control. DFS can be used to:
- Find Connectivity: Determine if two nodes (drones or ground stations) are connected within the network.
- Identify Bridges and Articulation Points: Find critical communication links or nodes whose failure would partition the network.
- Map Network Structure: Understand the overall layout and reachability of the drone communication infrastructure.
Intelligent Decision Making and State Space Search
In more advanced drone applications, such as those involving artificial intelligence, DFS is a foundational algorithm for exploring decision trees or state spaces.
AI-Driven Behaviors
When a drone needs to make complex decisions or learn new behaviors, it can be framed as a search problem. The possible actions the drone can take at any given moment represent branches in a state-space tree. DFS can explore these branches to evaluate potential outcomes and choose the action that leads to the desired goal.
- State Representation: Each possible configuration or state of the drone and its environment is a node.
- Action Transitions: Edges represent the transitions between states achieved by specific drone actions.
- Goal Seeking: DFS can be used to find a sequence of actions that transitions the drone from its current state to a desired goal state.
Advantages and Limitations of DFS in Drone Contexts
Like any algorithm, DFS has its strengths and weaknesses when applied to drone operations.
Strengths
- Simplicity and Efficiency for Certain Tasks: For finding any path or for exhaustive exploration, DFS can be relatively straightforward to implement and computationally efficient, especially when the solution path is deep within the search tree.
- Memory Efficiency (Iterative): The iterative version of DFS, using a stack, can be more memory-efficient than Breadth-First Search (BFS) in scenarios where the graph is very wide but not necessarily very deep, as it only needs to store the nodes along the current path being explored.
- Natural Fit for Exploration: Its depth-first nature makes it intuitive for tasks that require exploring one path fully before trying others, such as systematic area mapping or deep reconnaissance.
Limitations
- Not Guaranteed Optimal Path: Standard DFS does not guarantee finding the shortest path between two points. If the goal is to find the minimum distance or time, DFS would need to be augmented or replaced by algorithms like BFS (for unweighted graphs) or Dijkstra’s/A* (for weighted graphs).
- Potential for Very Deep Recursion: In extremely deep or poorly structured state spaces, the recursive implementation of DFS can lead to stack overflow errors if the recursion depth exceeds the system’s limits. This is why the iterative approach with an explicit stack is often preferred for robustness.
- Can Get Stuck in Long, Unfruitful Paths: If the goal is located on a branch that is explored very late, DFS might explore a significant portion of the graph in unproductive directions before finding the solution.
DFS vs. Other Graph Traversal Algorithms in Drone Applications
Understanding how DFS compares to other common graph traversal algorithms, like Breadth-First Search (BFS), is crucial for selecting the most appropriate algorithm for a given drone task.
Breadth-First Search (BFS)
BFS explores the graph level by level. It starts at the root node and visits all its immediate neighbors. Then, for each of those neighbors, it visits their unvisited neighbors, and so on.
- Key Difference: BFS explores all neighbors at the current depth before moving to the next depth. DFS explores as deeply as possible along one branch before backtracking.
- Application Suitability:
- BFS is ideal for finding the shortest path in an unweighted graph. In drone navigation, this translates to finding the path with the fewest waypoints or segments.
- DFS is better for finding a path or for tasks that benefit from deep exploration.
Dijkstra’s Algorithm and A* Search
These algorithms are designed for finding the shortest path in weighted graphs (where edges have associated costs, such as distance, time, or energy consumption).
- Key Difference: Both Dijkstra’s and A* consider the “cost” of paths. A* is an informed search algorithm that uses a heuristic function to estimate the cost from a node to the target, making it generally more efficient than Dijkstra’s for finding the shortest path.
- Application Suitability: For drones where fuel efficiency, flight time, or energy consumption are critical factors, these algorithms are indispensable. DFS would only find a path, not necessarily the most resource-efficient one.
Conclusion: The Unseen Power of DFS in Drones
While the title “What is DFS Algorithm?” might seem removed from the tangible world of quadcopters and gimbals, its influence on drone technology is profound. DFS is a fundamental building block for enabling intelligent autonomy, efficient exploration, and robust navigation. Whether it’s charting a course through a complex urban environment, systematically mapping a disaster zone, or ensuring seamless communication within a drone swarm, the principles of Depth-First Search are silently at work, empowering these aerial machines to perform increasingly sophisticated tasks. As drone technology continues to evolve, so too will the algorithms that govern their behavior, with DFS remaining a foundational concept for understanding and developing these advanced capabilities.