In the intricate world of aerial navigation and autonomous flight, understanding the precise terminology is paramount. When discussing flight paths, spatial orientation, and the algorithms that govern drone movement, concepts like “parallel side” emerge not as a simple geometric term, but as a critical descriptor of spatial relationships and navigational intent. While the term itself might seem straightforward, its application in flight technology is nuanced, influencing everything from obstacle avoidance to formation flying and waypoint navigation. This exploration delves into the multifaceted meaning and significance of a “parallel side” within the context of modern flight technology.
The Geometric Foundation: Lines and Planes in Space
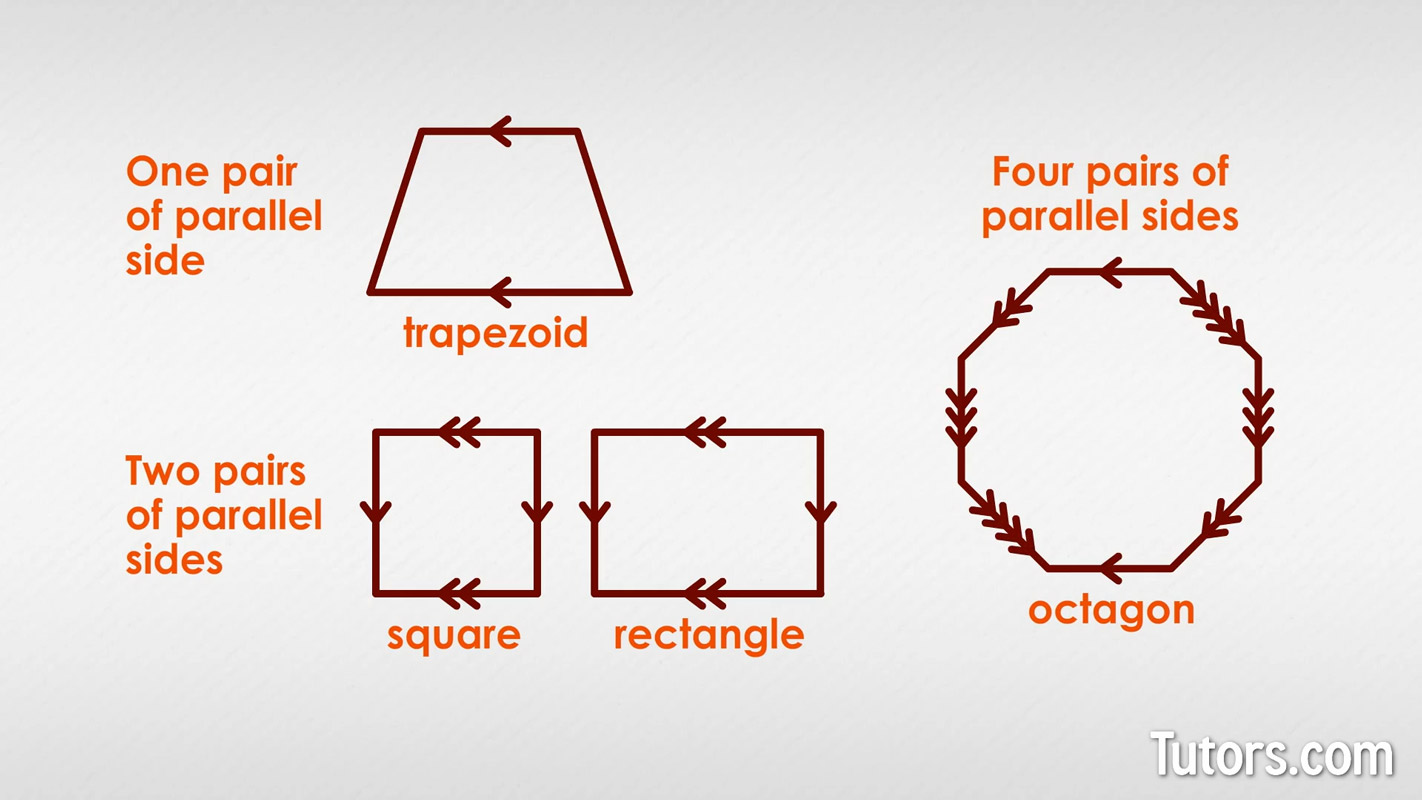
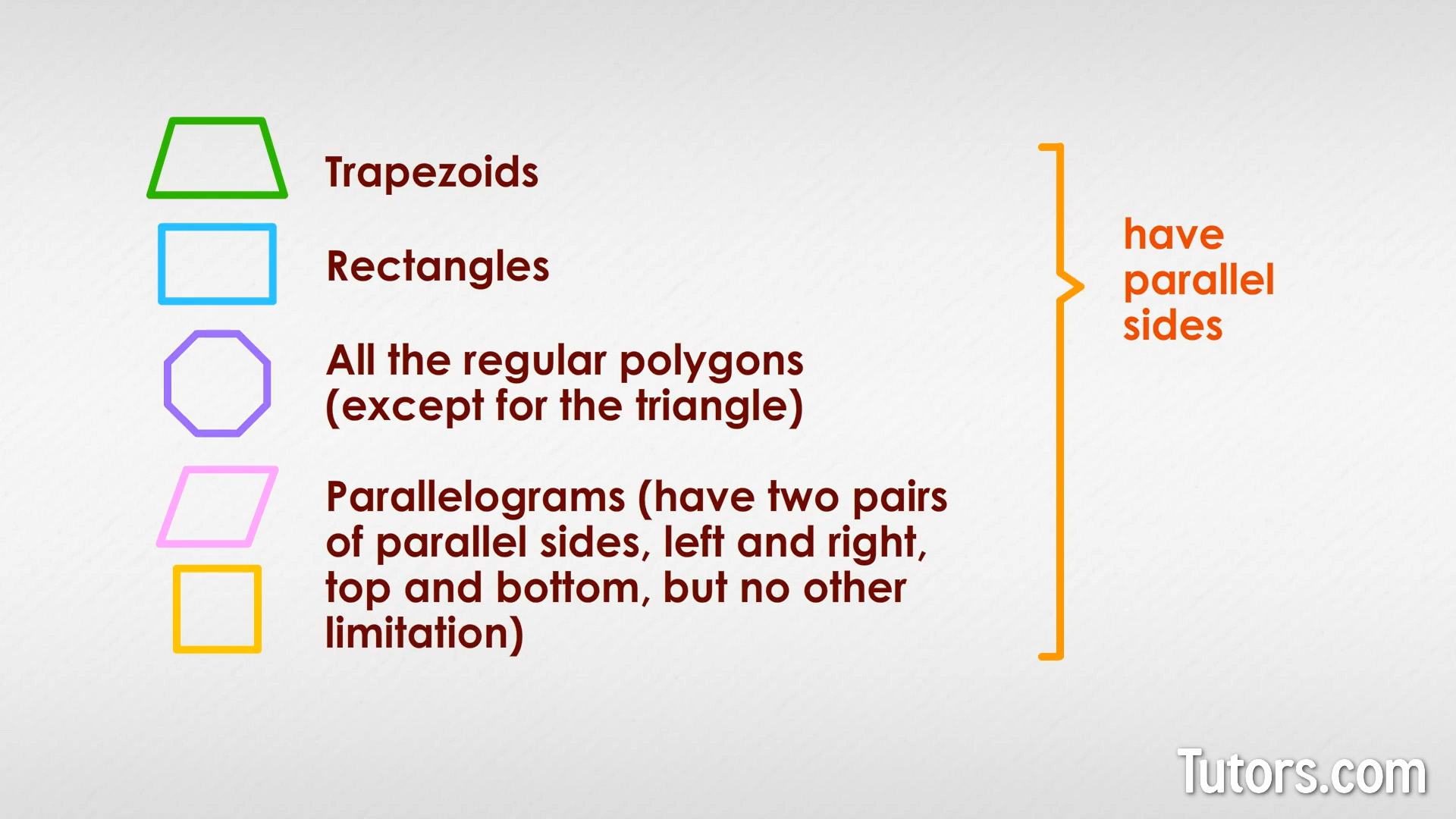
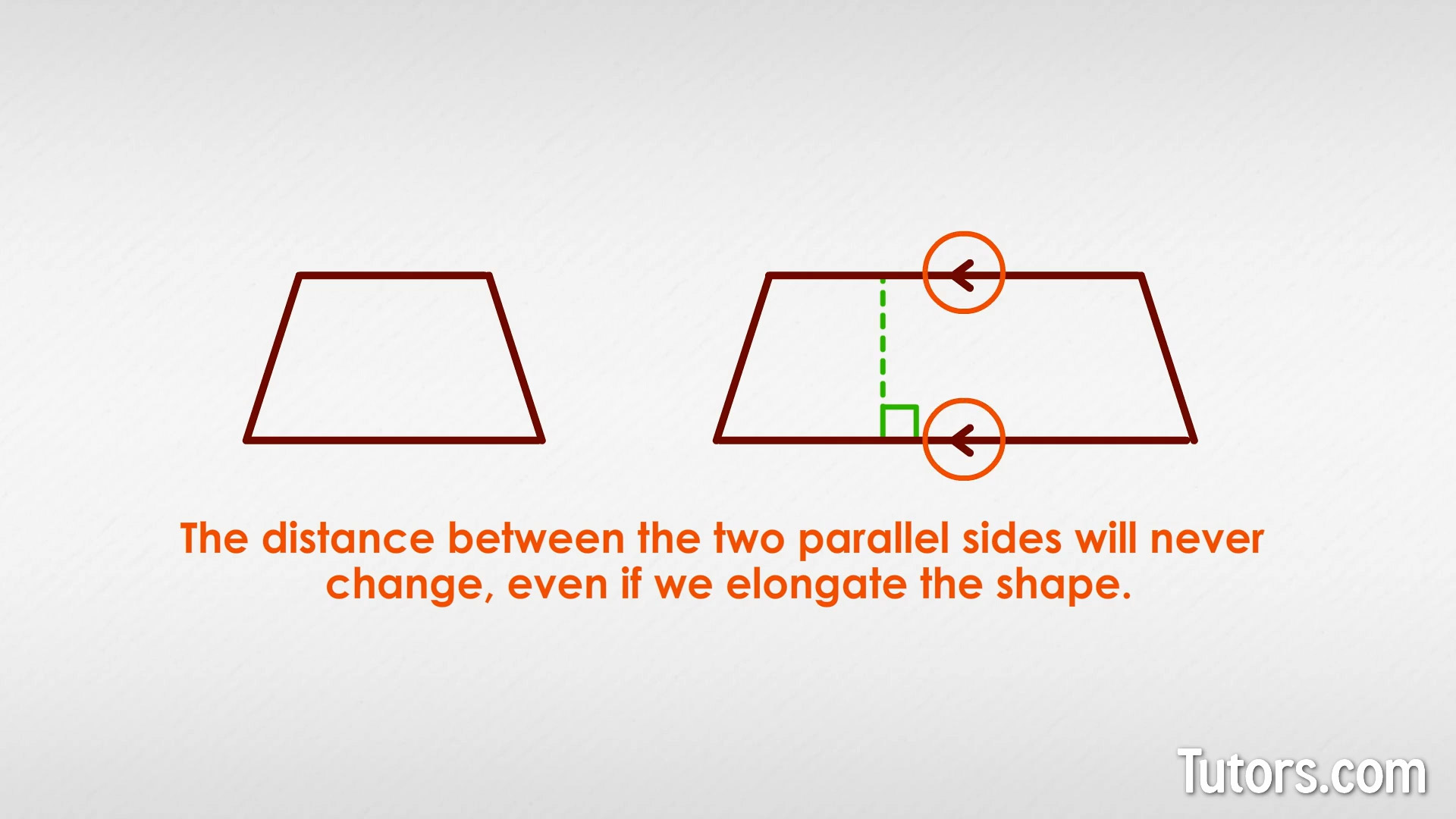
At its core, the concept of a “parallel side” originates from Euclidean geometry. Two lines are parallel if they lie in the same plane and never intersect, no matter how far they are extended. This fundamental principle extends to planes as well; two planes are parallel if they are always the same distance apart and never meet. In the context of three-dimensional space, this translates to maintaining a constant orientation and separation.
Lines of Flight
When we consider the trajectory of a drone, its path can be thought of as a line or a series of connected line segments. If a drone is programmed to follow a specific route, the segments of that route can be analyzed for parallelism. For instance, in a grid-like mapping mission, the flight lines are designed to be parallel to each other to ensure complete coverage of the area. The distance between these parallel lines is a critical parameter, directly impacting the resolution and thoroughness of the data collected.
Spatial Orientation and Reference Frames
Beyond the actual path, the orientation of the drone itself involves concepts of parallelism. A drone’s internal sensors, such as gyroscopes and accelerometers, work in conjunction with GPS and other navigation systems to establish a stable reference frame. This reference frame is often aligned with the Earth’s coordinate system (e.g., North-South, East-West). When a drone maintains a specific orientation relative to these cardinal directions, its “sides” (referring to its physical structure or directional axes) might be considered parallel to hypothetical lines extending from those directions. For example, a drone programmed to maintain a constant heading of due North has its longitudinal axis parallel to the North-South direction.
Defining Parallelism in a Dynamic Environment
The challenge in flight technology arises because the “lines” and “planes” involved are not static. A drone is constantly moving, and its environment can be complex and dynamic. Therefore, the concept of a “parallel side” often refers to the intended or maintained relationship between:
- Two distinct flight paths: One path being parallel to another.
- A flight path and a geographical feature: For example, flying parallel to a river or a road.
- A drone’s axis and a reference direction: Maintaining parallelism with a specific vector in space.
- The surfaces of multiple drones: In formation flying, maintaining parallel alignment between individual drones.
The algorithms that govern these relationships must account for real-time adjustments due to wind, sensor drift, and other environmental factors to maintain parallelism rather than just establishing it once.
Applications in Navigation and Mission Planning
The concept of parallel sides plays a crucial role in various flight technology applications, directly impacting efficiency, data quality, and safety.
Grid Mapping and Surveying
One of the most straightforward applications is in aerial surveying and mapping. Drones are frequently tasked with covering a large area systematically. This is typically achieved by flying in a series of parallel transects or swaths. The drone flies back and forth across the area, with each pass being parallel to the previous one.
Ensuring Complete Coverage
The parallel nature of these flight lines is essential for ensuring that the entire target area is captured by the drone’s sensors (e.g., cameras or LiDAR). The overlap between adjacent swaths is carefully calculated to avoid gaps in the data. The accuracy with which the drone can maintain parallelism directly affects the completeness and quality of the resulting map or 3D model. If the lines drift from being parallel, areas might be missed or redundantly scanned, leading to inefficiencies and inaccuracies.
Optimal Path Planning
Advanced flight planning software utilizes algorithms to generate optimal parallel flight paths. These algorithms consider factors such as the sensor’s field of view, the desired resolution, the terrain, and potential obstacles to create the most efficient grid pattern. The concept of “parallel sides” here refers to the geometric arrangement of these planned paths.
Obstacle Avoidance and Path Following
Maintaining parallelism can also be a component of sophisticated obstacle avoidance systems. While not always explicitly termed “parallel side,” the underlying principle involves maintaining a desired spatial relationship. For instance, if a drone is programmed to follow a specific path, and an obstacle is detected, the system might adjust the drone’s trajectory to move parallel to its original intended path but around the obstruction.
Dynamic Path Adjustment
Consider a drone tasked with inspecting a long, linear structure like a pipeline or a bridge. The drone must maintain a consistent distance and orientation relative to the structure. This involves the drone’s path being continuously adjusted to remain parallel to the surface or axis of the structure, even if the structure itself has curves or changes in elevation. The drone’s control system actively works to keep its lateral and longitudinal axes in a parallel relationship with the target, compensating for its own movements and any minor deviations.
Formation Flying and Multi-Drone Operations
In advanced multi-drone operations, such as coordinated surveillance, light shows, or complex aerial maneuvers, the concept of parallel sides becomes critical for maintaining the integrity and formation of the group.
Relative Positioning and Alignment
When drones fly in formation, their relative positions and orientations are precisely controlled. For a rectangular formation, for example, the drones on opposite sides of the rectangle must maintain parallel flight paths to preserve the shape. Similarly, the leading and trailing drones in a line formation must maintain parallelism with each other.
Inter-Drone Communication and Control
Sophisticated control systems manage these formations. The algorithms rely on precise measurements of each drone’s position and orientation relative to its neighbors. The concept of maintaining a “parallel side” is fundamental to keeping these drones correctly aligned and preventing collisions. This involves ensuring that the vector representing the distance between two drones remains constant in direction and magnitude relative to their respective orientations, or that their flight paths maintain a parallel relationship over time.
The Role of Sensors and Algorithms
The ability of a drone to understand and maintain “parallel sides” in its operations is heavily reliant on its sensor suite and the underlying algorithms that process the sensor data.
Inertial Measurement Units (IMUs)
IMUs, comprising accelerometers and gyroscopes, are crucial for determining the drone’s orientation in three-dimensional space. They provide data on pitch, roll, and yaw, which are essential for understanding how the drone’s physical “sides” are oriented relative to the horizon and other reference frames. This data is fundamental to maintaining a stable flight and executing maneuvers that involve precise angular control.
Global Navigation Satellite Systems (GNSS) and Waypoint Navigation
GNSS (like GPS) provides the drone with its absolute position in the world. In waypoint navigation, a series of pre-defined points are programmed into the flight plan. The drone then calculates a path to connect these waypoints. The geometry of these waypoints dictates the desired flight paths, and the algorithms ensure that the drone attempts to maintain parallelism with these planned paths. The accuracy of GNSS positioning directly impacts the ability to follow these paths precisely.
Visual Odometry and SLAM
For operations where GNSS signals may be weak or unavailable (e.g., indoors or in urban canyons), visual odometry and Simultaneous Localization and Mapping (SLAM) techniques come into play. These technologies use cameras to track the drone’s movement and build a map of the environment simultaneously. By analyzing visual features, these systems can infer the drone’s trajectory and orientation, allowing it to maintain parallelism with previously mapped areas or intended flight lines, even in complex, unstructured environments.
Control Systems and Feedback Loops
The raw data from sensors is fed into sophisticated control algorithms. These algorithms constantly compare the drone’s actual state (position, orientation, velocity) with its desired state. If the drone deviates from maintaining a parallel path or orientation, the control system generates corrective commands to the motors, bringing the drone back into alignment. This continuous feedback loop is what allows drones to accurately maintain parallelism, even in the face of external disturbances.
Challenges and Future Directions
While significant progress has been made, maintaining precise parallelism in all flight scenarios remains a challenge. Environmental factors, sensor inaccuracies, and computational limitations can all introduce deviations.
Environmental Disturbances
Wind is a primary challenge. Gusts can easily push a drone off its intended parallel course. While control systems can compensate for steady winds, rapid changes in wind speed and direction require extremely responsive algorithms and robust sensor data to maintain accurate parallelism.
Sensor Drift and Calibration
Over time, sensors can drift, leading to inaccuracies in orientation and position data. Regular calibration is essential, but in prolonged autonomous missions, maintaining a perfect sense of parallelism can be difficult without periodic re-calibration or cross-validation with other sensor systems.
Computational Complexity
For highly dynamic scenarios, such as swarming drones executing complex maneuvers or precise inspection of rapidly moving targets, the computational power required to process sensor data and execute real-time control commands to maintain parallelism can be immense.
Advancements in AI and Machine Learning
The future of maintaining precise “parallel sides” in flight technology likely lies in the further integration of artificial intelligence and machine learning. AI can learn from past flight data to predict and compensate for environmental disturbances more effectively. Machine learning algorithms can optimize path planning for complex geometries and dynamically adjust flight paths in real-time to maintain desired parallel relationships with targets or other drones. Techniques like deep reinforcement learning could enable drones to autonomously discover optimal strategies for maintaining parallelism in challenging and unpredicted conditions. Furthermore, as sensor technology improves and computational power increases, drones will become even more adept at understanding and executing commands related to maintaining specific spatial relationships, making the concept of a “parallel side” a fundamental building block for increasingly sophisticated autonomous flight operations.