The concept of “mg” in physics, particularly within the context of flight technology, is fundamental to understanding how objects, especially aerial vehicles, interact with their environment and maintain stability. While the specific abbreviation “mg” might not be a universally standalone term like “force” or “velocity,” it directly relates to the ubiquitous force of gravity, often represented as Fg or W (weight), and the derived unit of mass, the milligram (mg). In the realm of flight technology, comprehending the influence of gravity, the mass of the drone, and the forces that counteract them is paramount for successful flight.
Understanding Gravitational Force and Mass
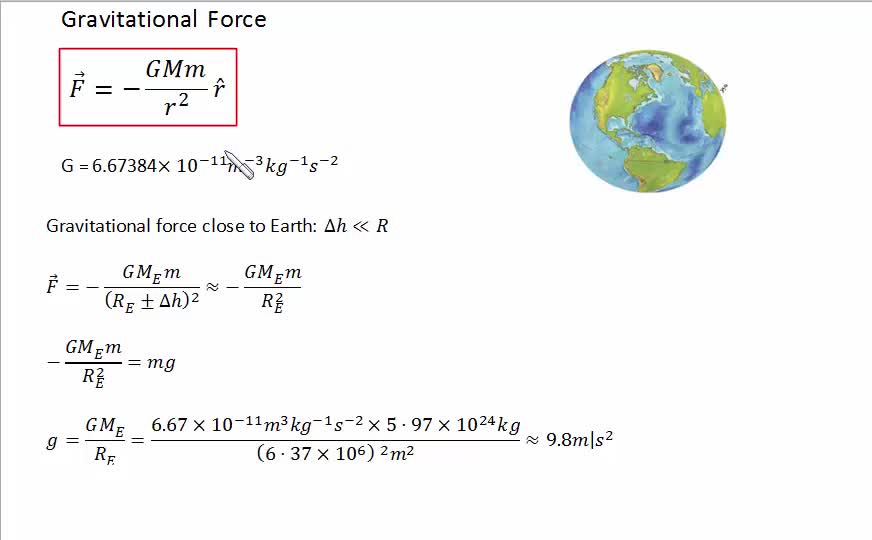
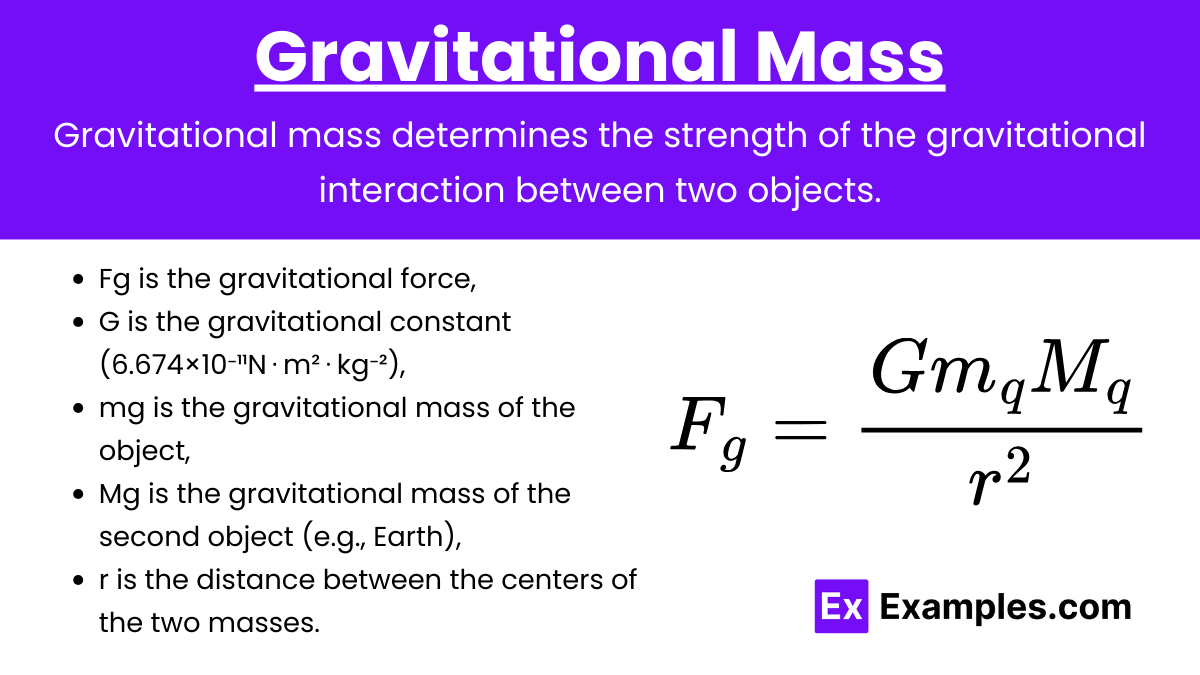
The force of gravity is a fundamental interaction that pulls any two objects with mass towards each other. On Earth, this manifests as the pull of our planet on all objects near its surface. This force is directly proportional to the product of the masses of the two objects and inversely proportional to the square of the distance between their centers. For a drone, the primary gravitational force it experiences is the pull of the Earth.
Weight and its Relation to Mass
Weight (W) is the force of gravity acting on an object’s mass. It is calculated by the equation:
W = m × g
where:
- m is the mass of the object (typically measured in kilograms, kg, in SI units).
- g is the acceleration due to gravity, which is approximately 9.81 meters per second squared (m/s²) on Earth’s surface.
Therefore, if a drone has a mass of 1 kg, its weight would be approximately 9.81 Newtons (N).
The Milligram (mg) as a Unit of Mass
The milligram (mg) is a unit of mass in the metric system, equal to one-thousandth of a gram (1 g = 1000 mg) or one-millionth of a kilogram (1 kg = 1,000,000 mg). While larger drones are typically measured in kilograms, smaller components, sensors, or even the overall mass of micro-drones might be discussed in grams or milligrams, especially in precision engineering and when considering the cumulative effect of many small parts.
For instance, a tiny sensor that adds just a few milligrams of mass to a micro-drone might still be significant if the drone’s total operating weight is only a few grams. In flight technology, even minute variations in mass can affect performance, battery life, and maneuverability.
Mass Distribution and Center of Gravity
Beyond the total mass, the distribution of mass within a drone is critical. The center of gravity (CG) is the point where the entire weight of the drone can be considered to act. In flight technology, maintaining a stable and predictable center of gravity is essential for control and stability.
Impact on Stability
An imbalanced CG, where the center of gravity is not aligned with the drone’s geometric center or its intended thrust vectors, can lead to instability. For example, if the CG is too far forward, the drone might tend to pitch forward uncontrollably. If it’s too high, it can make the drone more susceptible to rolling. Flight control systems are designed to compensate for these factors, but a well-balanced drone requires less aggressive correction, leading to smoother flight and better energy efficiency.
CG and Gimbal Systems
In camera drones, the CG of the camera gimbal system is particularly important. The gimbal itself has mass, and its position relative to the drone’s chassis influences the overall CG. Advanced gimbal stabilization systems actively work to counteract the effects of the drone’s movement, but the effectiveness and power required are influenced by the mass and CG of the camera package.
Counteracting Gravity: The Forces of Flight
To achieve flight, a drone must generate forces that overcome the downward pull of gravity. These forces are primarily generated by propellers driven by motors.
Thrust Generation
The propellers spin at high speeds, pushing air downwards. According to Newton’s third law of motion (for every action, there is an equal and opposite reaction), this downward expulsion of air creates an upward force known as thrust.
Propeller Design and Thrust
The size, shape, pitch, and rotational speed of propellers are meticulously engineered to generate sufficient thrust to lift the drone’s weight (including its own mass, battery, payload, and any attached components). For a drone to take off and hover, the total upward thrust generated by all its motors must equal its total weight. To ascend, thrust must exceed weight; to descend, thrust must be less than weight.
Motor Power and Efficiency

The motors that drive the propellers are responsible for generating the rotational force (torque) needed to spin them. The power output of these motors, coupled with the efficiency of the propellers, directly determines the amount of thrust that can be produced. Higher-powered motors can generate more thrust, allowing drones to carry heavier payloads or achieve faster ascent rates. However, more power consumption means shorter flight times, a crucial consideration in flight technology.
Advanced Concepts: Gravity Compensation and Inertial Measurement Units (IMUs)
Flight technology relies heavily on systems that can sense and compensate for gravitational forces to maintain orientation and stability.
The Role of the IMU
An Inertial Measurement Unit (IMU) is a critical sensor package found in nearly all modern drones. It typically comprises an accelerometer and a gyroscope.
Accelerometers
Accelerometers measure linear acceleration. While they can detect changes in velocity, they are also sensitive to the constant acceleration due to gravity. By measuring the direction and magnitude of the gravitational pull when the drone is at rest or moving at a constant velocity, the accelerometer can help determine the drone’s orientation relative to the Earth’s surface (its pitch and roll angles). When the drone is accelerating, the accelerometer measures the combined effect of motion and gravity, requiring sophisticated algorithms to differentiate between the two.
Gyroscopes
Gyroscopes measure angular velocity (rate of rotation). They are essential for detecting and correcting unwanted rotations around the drone’s axes (yaw, pitch, and roll). While gyroscopes don’t directly measure gravity, they work in conjunction with accelerometers to provide a comprehensive understanding of the drone’s attitude and movement.
Sensor Fusion and Attitude Estimation
The data from accelerometers and gyroscopes are combined through a process called sensor fusion. Algorithms, such as Kalman filters or complementary filters, are used to merge the strengths of both sensors. Gyroscopes provide accurate short-term measurements of rotation, while accelerometers provide a stable long-term reference by sensing gravity. This fusion allows the flight controller to accurately estimate the drone’s attitude – its orientation in three-dimensional space – even during dynamic maneuvers.
Gravity Vector and Stabilization
The flight controller continuously uses the estimated attitude, derived from IMU data and accounting for gravity, to command the motors. If the drone starts to drift or tilt due to external forces (like wind) or internal imbalances, the flight controller detects this deviation from the desired attitude and adjusts motor speeds to counteract the change, thereby maintaining stable flight and compensating for the influence of gravity and other disturbances.
Payload Considerations and Maximum Takeoff Weight (MTOW)
The mass of a drone is not static. It changes depending on the payload it is carrying. This includes the battery, camera systems, sensors, and any other equipment attached for a specific mission.
Understanding Payload Capacity
Flight technology design incorporates a Maximum Takeoff Weight (MTOW). This is the maximum permissible weight of a drone, including its structure, power plant, payload, fuel, and any other essential operational equipment. It is a critical specification determined by the drone’s structural integrity, motor power, and propeller thrust capabilities.
Impact of Payload Mass on Performance
Exceeding the MTOW can lead to compromised flight performance, reduced maneuverability, increased risk of failure, and potentially unsafe operation. Even within the MTOW, adding significant payload mass will reduce flight endurance and agility. The increased weight means the motors must work harder, consuming more battery power. This directly impacts the “mg” (mass) of the system and its ability to counteract gravitational force efficiently.
Battery Life and Mass
The battery is often one of the heaviest components of a drone. Its mass directly contributes to the overall weight the motors must lift. Therefore, battery technology plays a crucial role in flight endurance. Lighter, more energy-dense batteries allow for longer flight times while maintaining or even reducing the drone’s overall mass. The trade-off between battery capacity (flight time) and battery mass is a constant challenge in drone design.
Future Trends and the Role of Mass in Advanced Flight
As flight technology evolves, the precise control and management of mass and gravity continue to be central.
Lightweight Materials and Structural Design
The development of advanced, lightweight materials like carbon fiber composites is revolutionizing drone construction. These materials reduce the inherent mass of the drone’s airframe, allowing for greater payload capacity or longer flight times for a given power source. The precise engineering of these structures also ensures that the center of gravity remains optimized for stability.
Autonomous Flight and Gravity Compensation
Future autonomous flight systems will rely even more heavily on sophisticated sensor fusion and predictive algorithms. These systems will need to accurately model and predict the influence of gravity, wind, and other environmental factors to perform complex maneuvers, navigate challenging terrains, and execute precise tasks without human intervention. The ability to accurately account for every milligram of mass and its contribution to the overall gravitational load will be key to unlocking new levels of autonomous capability.
In essence, while “mg” might appear as a small unit of mass, its implications within flight technology are immense. From the fundamental forces of gravity and thrust to the intricate workings of stabilization systems and payload management, understanding and meticulously controlling mass and its interaction with gravity are at the very core of designing and operating successful aerial vehicles.