Understanding the fundamental principles behind flight technology is crucial for anyone involved in aviation, from seasoned pilots to drone enthusiasts. Among these principles, the concept of vectors plays a pivotal role, especially when analyzing forces and motion. A resultant vector, in particular, is a core concept that helps us comprehend how multiple forces or velocities combine to produce a single, unified effect. This understanding is not just theoretical; it directly impacts navigation systems, stabilization mechanisms, and the overall performance of aerial vehicles like drones.
The Essence of Vectors in Flight Technology
At its heart, a vector is a quantity that possesses both magnitude and direction. In flight technology, vectors are used to represent a wide array of physical quantities. Velocity, for instance, is a vector: an aircraft or drone has a speed (magnitude) and is moving in a specific direction. Force is another prime example; thrust from propellers, drag from the air, and the pull of gravity are all forces acting in particular directions with varying strengths.
The power of vector representation lies in its ability to depict complex interactions in a simplified, graphical, and mathematical manner. When we analyze how a drone maneuvers, how a GPS system calculates its position and velocity, or how stabilization algorithms counteract external disturbances, we are inherently dealing with vectors.
Understanding Magnitude and Direction
The magnitude of a vector represents its size or intensity. For a velocity vector, this is the speed. For a force vector, it’s the strength of the force. Visually, the magnitude is often depicted by the length of an arrow. A longer arrow signifies a larger magnitude, while a shorter one indicates a smaller magnitude.
The direction of a vector indicates the orientation in which the quantity is acting. This can be represented by an angle relative to a reference axis (like North or East) or by a unit vector. In aviation, precise directional information is paramount. A slight deviation in direction can lead to significant navigation errors or unstable flight.
Vector Addition: The Foundation of Resultant Vectors
The concept of a resultant vector arises from the process of vector addition. When multiple vectors act upon a single point or object, their combined effect is represented by a single vector – the resultant vector. This addition is not a simple arithmetic sum because direction must be taken into account.
There are several graphical and mathematical methods to add vectors:
The Tip-to-Tail Method (Graphical Addition)
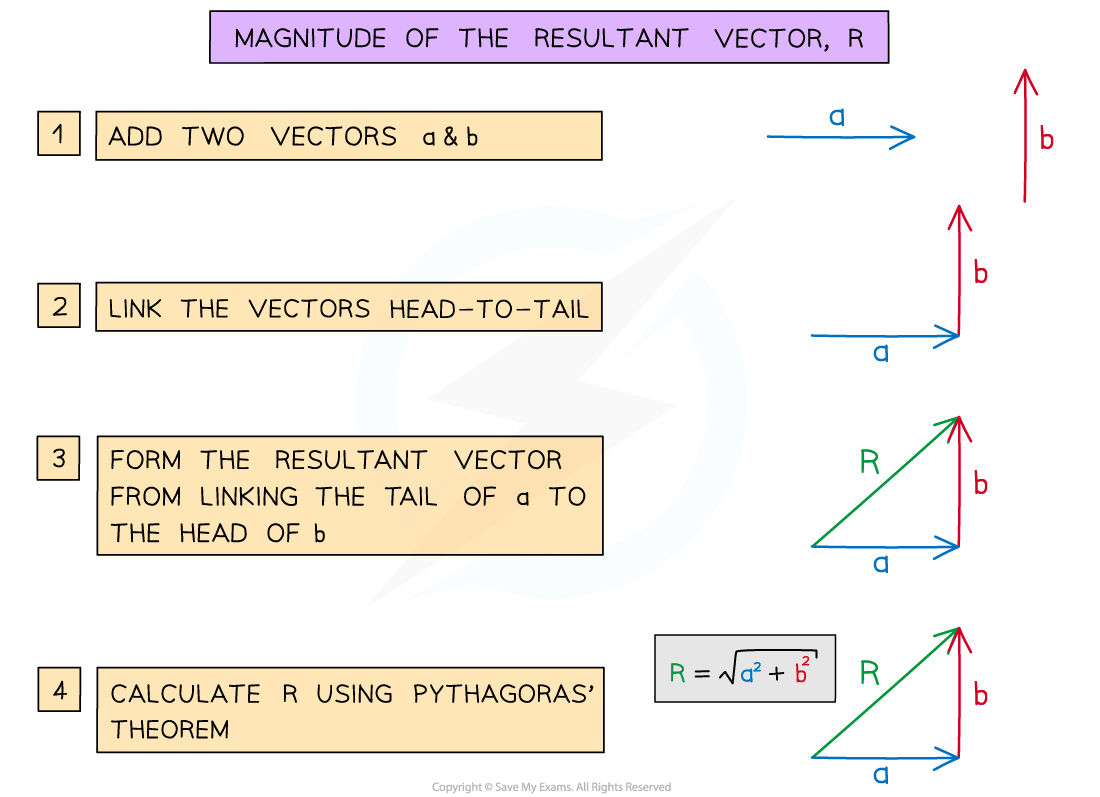
This is an intuitive graphical approach. To add two vectors, say vector A and vector B, you draw vector A. Then, starting from the tip of vector A, you draw vector B. The resultant vector, R, is drawn from the tail of vector A to the tip of vector B. This creates a triangle where vector A, vector B, and vector R are the sides.
The Parallelogram Method (Graphical Addition)
For adding two vectors that share a common starting point (tail), you can form a parallelogram. Draw vector A and vector B originating from the same point. Then, complete the parallelogram by drawing lines parallel to A and B. The diagonal of the parallelogram starting from the common origin represents the resultant vector R.
Component Method (Mathematical Addition)
This is the most precise and widely used method in flight technology for its ease of implementation in calculations. Any vector can be resolved into its components along orthogonal axes (e.g., X and Y axes, or North and East components).
For a vector V with magnitude $M$ and angle $theta$ with respect to the X-axis:
- $V_x = M cos(theta)$ (X-component)
- $V_y = M sin(theta)$ (Y-component)
To find the resultant vector R of several vectors ($V1, V2, …, V_n$), you sum the individual components along each axis:
- $Rx = V{1x} + V{2x} + … + V{nx}$
- $Ry = V{1y} + V{2y} + … + V{ny}$
Once the resultant components ($Rx, Ry$) are found, the magnitude of the resultant vector can be calculated using the Pythagorean theorem:
- $|R| = sqrt{Rx^2 + Ry^2}$
And its direction can be found using the arctangent function:
- $thetaR = arctanleft(frac{Ry}{R_x}right)$
Applications of Resultant Vectors in Flight Technology
The concept of the resultant vector is not an abstract mathematical curiosity; it is a cornerstone of how flight technology operates. From maintaining stable flight to navigating vast distances, understanding the combined effect of various forces and motions is essential.
Navigation and Position Fixing
GPS (Global Positioning System) receivers on drones and aircraft constantly process signals from multiple satellites. Each signal provides information about the satellite’s position and the time the signal was transmitted. By calculating the time difference for signals from at least four satellites, the receiver can determine its precise three-dimensional position. This process implicitly involves calculating the resultant vector of the signals received relative to the receiver’s position.
Furthermore, navigation involves calculating the intended path and comparing it with the actual trajectory. If a drone’s intended velocity vector is not aligned with its actual velocity vector due to wind or control inputs, the control system must generate corrective thrust vectors to adjust the resultant velocity vector to follow the desired path.
Waypoint Navigation
When a drone is programmed to fly a series of waypoints, its flight path is a sequence of intended velocity vectors. The control system must continuously calculate the resultant thrust vector required from the propellers to achieve the desired velocity vector and counteract external forces like wind. If the drone drifts off course, the resultant navigation vector will deviate from the planned vector, triggering corrective actions.
Dead Reckoning
In situations where GPS signals are unreliable or unavailable, navigation systems often employ dead reckoning. This involves estimating position based on a previously determined position and then adding a series of velocity and time vectors. The resultant vector from this calculation gives the estimated current position.

Stabilization Systems and Flight Control
The inherent instability of an aerial platform, especially a multirotor drone, necessitates sophisticated stabilization systems. These systems constantly monitor the aircraft’s orientation and motion using sensors like gyroscopes and accelerometers.
Attitude Stabilization
A drone’s flight controller aims to maintain a specific attitude (pitch, roll, and yaw). If external forces, such as wind gusts, push the drone off its intended attitude, these forces are represented as vectors. The stabilization system detects this deviation and calculates corrective motor thrust vectors. The resultant of these corrective thrust vectors must oppose the disturbance vectors and bring the drone back to its stable attitude.
Altitude Hold
Maintaining a constant altitude is another critical function. If the drone starts to descend due to an updraft or lack of sufficient thrust, this downward motion is a velocity vector. The flight controller will increase motor thrust, creating an upward force vector. The resultant of the existing thrust and the additional thrust, when combined with gravity and any vertical wind components, determines the drone’s vertical acceleration and helps it regain and maintain the target altitude.
Understanding Aerodynamic Forces
The interaction between an aircraft and the air generates complex forces. Understanding how these forces combine is vital for efficient and safe flight.
Lift, Drag, Thrust, and Weight
For any flying object, four primary forces are always in play:
- Thrust: The forward force generated by engines or propellers.
- Drag: The resistive force from the air opposing motion.
- Lift: The upward force generated by wings or rotor blades.
- Weight: The downward force due to gravity.
In level, unaccelerated flight, the resultant of these forces is zero. However, during maneuvers or in turbulent conditions, these forces are constantly changing. For example, when a drone accelerates forward, the thrust vector is greater than the drag vector. When it banks to turn, the lift vector is not purely vertical, and its horizontal component, combined with other forces, dictates the turn’s radius and rate. The resultant aerodynamic force is the vector sum of lift and drag, and its direction and magnitude determine the aircraft’s acceleration and trajectory.
Wind Compensation
Wind is a significant external factor that affects drone flight. Wind is a velocity vector itself, and it adds vectorially to the drone’s airspeed (its speed relative to the air) to determine its groundspeed (its speed relative to the ground). To maintain a desired ground track, the drone’s pilot or autopilot must orient the drone such that its thrust vector compensates for the wind vector.
For instance, if a drone needs to fly directly north and there is a strong westerly wind, the drone must point slightly into the wind (northwest) to counteract the westerly drift. The resultant velocity vector (of the drone’s airspeed and the wind’s velocity) will then point directly north.
Advanced Flight Control and Maneuvers
Complex aerial maneuvers, such as aggressive acrobatic flying or precise formation keeping, rely heavily on the precise control of resultant vectors.
Coordinated Turns
In aviation, a coordinated turn is one where there is no sideslip. This is achieved by balancing the horizontal component of lift with the centrifugal force generated by the turn. The pilot or autopilot manipulates the aircraft’s attitude and power to ensure the resultant of the forces acting on the aircraft produces the desired turning motion without lateral slipping.
Autonomous Flight Paths
Autonomous systems, particularly in applications like aerial surveying and inspection, rely on pre-programmed flight paths. These paths are often defined by a series of points or curves in 3D space. The drone’s control system must continuously calculate the required velocity and acceleration vectors to follow these paths accurately. This involves understanding how to generate the necessary thrust vectors from the motors to achieve the desired resultant motion, taking into account all environmental factors.
The Mathematical Backbone of Resultant Vectors
While graphical methods offer intuition, the mathematical approach, particularly using components, is indispensable for practical flight control systems. Modern flight controllers are essentially sophisticated computers performing complex vector mathematics in real-time.
Coordinate Systems
To perform vector addition, a consistent coordinate system is essential. Common coordinate systems in flight technology include:
- Earth-Centered, Earth-Fixed (ECEF): Used for global positioning.
- North-East-Down (NED): A local Cartesian coordinate system often used for flight control and navigation.
- Body Frame: A coordinate system fixed to the drone itself, useful for defining control inputs and sensor measurements.
All vectors must be transformed into a common coordinate frame before they can be added. For example, sensor readings in the body frame might need to be rotated into the NED frame to be combined with navigation data.
Vector Calculus and Control Theory
The continuous adjustment of flight control surfaces or motor speeds is dictated by principles of calculus and control theory, which are built upon vector mathematics. For instance, a Proportional-Integral-Derivative (PID) controller calculates an output signal based on the present error (Proportional), the accumulation of past errors (Integral), and the rate of change of the error (Derivative). These error signals are often vector quantities, and the resulting control signal is also a vector that dictates the necessary adjustments to the aircraft’s actuators.
Simulation and Design
Before any flight hardware is built, flight dynamics are simulated extensively. These simulations rely on detailed mathematical models that represent the aircraft and its environment using vectors. By simulating the resultant forces and their effects over time, engineers can optimize designs, test control algorithms, and predict flight behavior with high accuracy. This is critical for ensuring the safety and efficacy of complex flight technologies.
In conclusion, the resultant vector is far more than an abstract mathematical concept. It is the unifying principle that allows us to comprehend and control the complex interplay of forces and motions governing flight. From the precision of GPS navigation to the stability of a drone in gusty winds, the resultant vector is the silent architect of aerial maneuverability and control, forming an indispensable part of modern flight technology.