In the realm of modern aerial photography and videography, Python has emerged as a powerful scripting language, increasingly used to control and automate various aspects of drone operations. From sophisticated flight path planning to real-time data analysis from onboard sensors, understanding the foundational elements of Python is crucial for drone enthusiasts and professionals alike. Among these fundamental elements, the concept of a “function” stands out as a cornerstone for building organized, reusable, and efficient code. This article delves into what a function is in Python, specifically exploring its relevance and application within the context of drone technology, covering aspects from flight control to data processing for aerial imaging.
The Essence of Functions in Python
At its core, a function in Python is a block of organized, reusable code that is used to perform a single, related action. Functions provide a way to break down complex problems into smaller, more manageable pieces, making code easier to write, understand, and debug. Think of a function as a mini-program within your larger program. You define it once, and then you can call it (execute it) multiple times from different parts of your code, or even from other functions.
Defining and Calling a Function
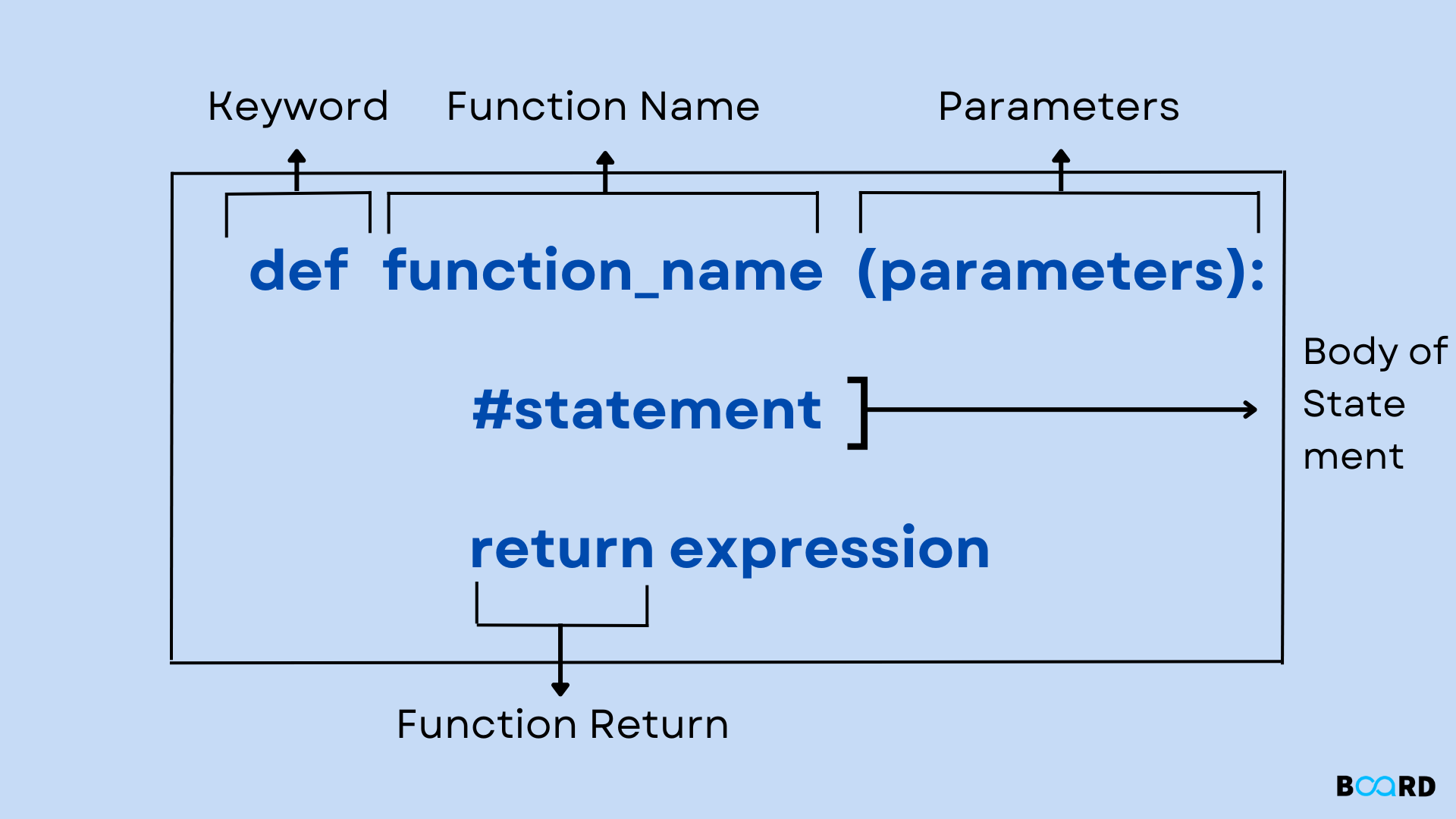
To create a function in Python, you use the def keyword, followed by the function name, parentheses (), and a colon :. The code block that forms the body of the function is indented.
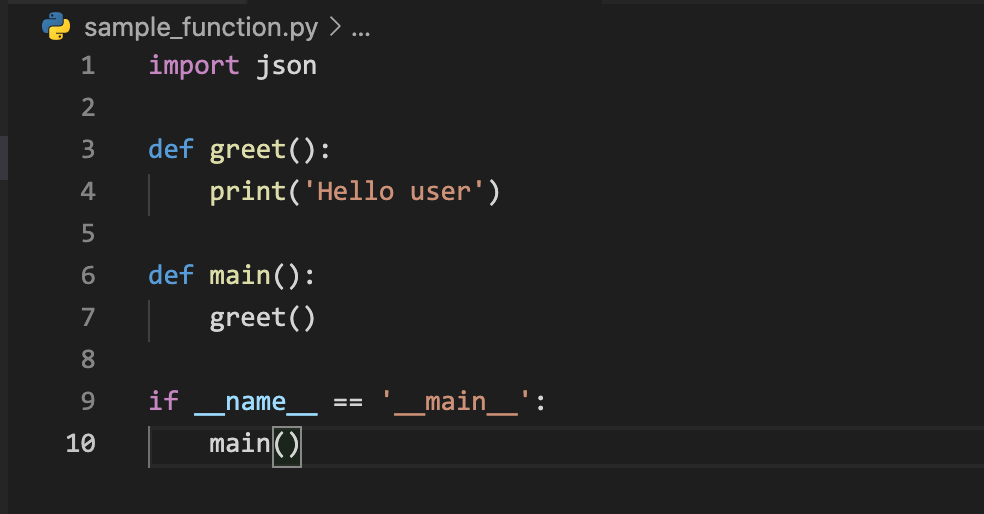
def greet_pilot():
print("Hello, drone pilot!")
Once defined, a function is called by using its name followed by parentheses.
greet_pilot() # This will print "Hello, drone pilot!"
Parameters and Arguments
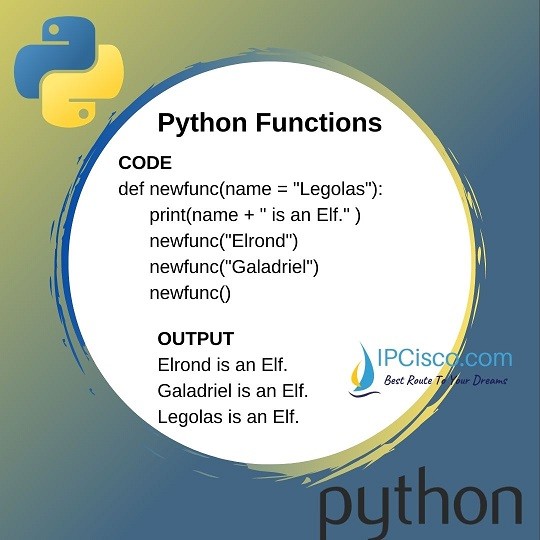
Functions can also accept input values, known as parameters (or arguments when the function is called). These parameters allow functions to be more flexible and dynamic, enabling them to operate on different data each time they are invoked. Parameters are defined within the parentheses in the function definition.
def take_off(altitude):
print(f"Initiating take-off to {altitude} meters.")
take_off(10) # Here, 10 is the argument passed to the altitude parameter
In this example, altitude is a parameter of the take_off function. When we call take_off(10), the value 10 is passed as an argument, and the function executes with altitude set to 10.
Return Values
Functions can also send information back to the part of the code that called them. This is done using the return statement. The return statement exits a function and can optionally pass a value back to the caller.
def calculate_battery_life(battery_percentage, current_draw_amps, voltage_volts):
# Assuming a simple calculation for demonstration
capacity_mah = 5000 # Example: 5000 mAh battery
power_watts = (current_draw_amps * voltage_volts) / 1000
estimated_runtime_hours = (capacity_mah * battery_percentage / 100) / (power_watts * 1000)
return estimated_runtime_hours
estimated_time = calculate_battery_life(75, 10, 11.1)
print(f"Estimated flight time remaining: {estimated_time:.2f} hours")
The calculate_battery_life function computes an estimated flight time and returns it. This returned value is then stored in the estimated_time variable and printed.
Functions in Drone Operation and Control
The ability to define and use functions is particularly transformative in drone programming. It allows for the modularization of complex flight sequences and sensor management, leading to more robust and maintainable codebases.
Flight Path Planning and Execution
When programming a drone to follow a specific path, functions become indispensable. Instead of writing a long, sequential script for every movement, you can define functions for common flight maneuvers.
Navigation Functions
Consider functions for basic navigation commands:
move_forward(distance): This function would instruct the drone to fly forward a specifieddistance.turn(degrees): This function would command the drone to rotate by a given number ofdegrees.ascend(altitude): This function would tell the drone to increase its altitude.land(): This function would initiate the landing sequence.
By combining these functions, complex flight paths can be constructed elegantly. For example, a function to circle a point might call move_forward() multiple times with small distances and turn() with small angles in succession.
def circle_point(radius, num_segments):
angle_increment = 360 / num_segments
distance_per_segment = 2 * math.pi * radius / num_segments # Circumference formula
for _ in range(num_segments):
move_forward(distance_per_segment)
turn(angle_increment)
This circle_point function, which would itself call other lower-level movement functions, encapsulates a complex aerial maneuver into a single, reusable unit.
Sensor Data Acquisition and Processing
Drones are equipped with a plethora of sensors – cameras, LiDAR, GPS, IMU (Inertial Measurement Unit), barometers, and more. Python functions are ideal for managing the acquisition and initial processing of data from these sensors.
Data Acquisition Functions
You might have functions like:
get_gps_coordinates(): Returns the drone’s current latitude and longitude.read_imu_data(): Returns acceleration and angular velocity readings.capture_image(filename): Triggers the camera to take a photo and saves it with a specifiedfilename.stream_video(resolution): Initiates a video stream with the givenresolution.
These functions abstract away the complexities of interfacing with hardware, providing a clean API for higher-level logic.
Data Processing Functions
Once data is acquired, functions are used for its initial analysis:
calculate_drone_orientation(): Processes IMU data to determine pitch, roll, and yaw.detect_obstacles(camera_feed): Analyzes a camera feed to identify potential obstacles.normalize_sensor_readings(raw_data): Applies calibration or filtering to sensor data.
These functions allow for data to be transformed into a more usable format for decision-making or for further, more complex analysis, such as in machine learning models for object recognition or autonomous navigation.
Enhancing Cinematic Videography with Functions
For aerial filmmakers, Python functions can automate repetitive camera movements and complex cinematic shots, allowing directors to focus on creative vision rather than intricate programming.
Creating Dynamic Camera Movements
Imagine needing to execute a “crane shot” – smoothly moving the drone upwards while keeping the camera pointed at a subject. This can be abstracted into a function.
crane_up(start_altitude, end_altitude, subject_target): This function would manage the drone’s ascent while simultaneously adjusting the gimbal to keep thesubject_targetcentered in the frame.
Similarly, functions can be created for other advanced shots:
dolly_zoom_effect(focus_distance, zoom_speed): Simulates the Hitchcock dolly zoom by moving the drone forward or backward while adjusting focal length or sensor position.orbit_subject(subject_location, radius, speed): Executes a smooth orbital path around a specifiedsubject_location.
Automating Sequence Recording
For projects requiring consistent footage, functions can ensure that specific sequences are recorded with precision.
record_survey_pattern(area_bounds, overlap_percentage): This function could program the drone to fly a grid pattern over a definedarea_bounds, capturing images or video with a specifiedoverlap_percentagefor photogrammetry or mapping.capture_timelapse_sequence(duration, interval, location): Sets up and executes a timelapse recording by taking shots at regularintervals for a totalduration.
By encapsulating these common filmmaking actions into functions, filmmakers can build libraries of reusable cinematic elements, drastically speeding up production and ensuring consistency across takes.
Functions in Advanced Drone Applications
Beyond basic flight and videography, Python functions are integral to sophisticated drone applications like mapping, surveying, and remote sensing.
Photogrammetry and Mapping
Creating 3D models and orthomosaics from aerial imagery relies on precise flight patterns.
generate_flight_plan(boundary_polygon, altitude, sensor_width, overlap): This function takes geographicboundary_polygonand sensor parameters to generate an optimal grid flight path for photogrammetry. It would then likely call lower-level navigation functions to execute this plan.process_image_batch(image_list, gps_data): This function would take a list of captured images and associated GPS data to begin the photogrammetry pipeline, potentially triggering external software or libraries for SfM (Structure from Motion) and MVS (Multi-View Stereo) processing.
Autonomous Navigation and AI Integration
Functions are the building blocks for enabling drones to operate autonomously and interact with their environment intelligently.
navigate_to_waypoint(waypoint_coordinates): This function would use GPS and onboard navigation systems to guide the drone to a specificwaypoint_coordinates.avoid_obstacle(sensor_data): This function, powered by sensor input, would determine the necessary evasive maneuvers to avoid a detected obstacle.perform_autonomous_inspection(target_object, inspection_criteria): A higher-level function that might combine navigation, vision, and conditional logic to autonomously inspect atarget_objectbased on predefinedinspection_criteria.
The ability to define functions that encapsulate decision-making processes based on sensor inputs and pre-programmed logic is what enables advanced autonomous capabilities in modern drones.
Conclusion: The Power of Modularity
In summary, functions in Python are fundamental to developing sophisticated drone applications. They allow for the breakdown of complex tasks into manageable, reusable units, promoting cleaner code, easier debugging, and greater flexibility. Whether you are programming flight paths, managing sensor data, creating cinematic shots, or implementing autonomous navigation, functions provide the essential structure and modularity needed to harness the full potential of Python in the dynamic world of drones and aerial technology. Mastering the art of defining and utilizing functions is a critical step for anyone looking to innovate and operate effectively within this exciting domain.